Структура поведения крыс при поиске пищи в радиальном лабиринте
В связи с проблемой «когнитивных карт» Дж.А.Уолкер и Д.С.Ол-тон (133) проводили эксперименты в «приподнятом» лабиринте, состоявшем из сети стартовых коробок, связанных между собой (рис. 2, 4, А, В, С и Д) и финишных коробок. В первой серии опытов крыс, стартующих из 3-х различных коробок, обучали приходить в центральную финишную коробку, где находилось пищевое подкрепление. После обучения этой… Читать ещё >
Содержание
- 1. ОБЗОР ЛИТЕРАТУРЫ
- 1. 1. Современные представления о поведении крыс в лабиринтах. II
- 1. 2. Поведение крыс в радиальном лабиринте
- 1. 3. Основные концепции
- 2. МЕТОДИКА
- 2. 1. Двенадцатилучевой радиальный лабиринт
- 2. 1. 1. Симметричный радиальный лабиринт
- 2. 1. 2. «Асимметричный» радиальный лабиринт
- 2. 1. 3. «Навязывающий» радиальный лабиринт
- 2. 2. У-образный лабиринт
- 2. 3. Линейный комплексный Т-образный лабиринт
- 2. 4. Основные способы обработки экспериментального материала
- 2. 1. Двенадцатилучевой радиальный лабиринт
- 3. РЕЗУЛЬТАТЫ ЭКСПЕРИМЕНТОВ
- 3. 1. Поведение крыс в радиальном лабиринте в условиях равномерного распределения пищи в коридорах
- 3. 1. 1. Обучение крыс линий Вистар и Крушинекого-Молодкиной в симметричном радиальном лабиринте
- 3. 1. 2. Влияние изменений пространственных характеристик радиального лабиринта или процедуры опытов на поведение крыс
- 3. 1. 2. Л. Поведение крыс в «асимметричном» радиальном лабиринте
- 3. 1. 2. 2. Поведение крыс в «навязывающем» радиальном лабиринте
- 3. 1. 2. 3. Поведение крыс при осуществлении
- 3. 1. Поведение крыс в радиальном лабиринте в условиях равномерного распределения пищи в коридорах
- 3. 1. 3. Влияние предшествующего обучения и других лабиринтах на поведение крыс, в симметричном радиальном лабиринте
- 3. 1. 3. 1. Влияние предшествующего обучения в «навязывающем» радиальном лабиринте («пассивное» обучение)
- 3. 1. 3. 2. Влияние предшествующего обучения в других лабиринтах («активное» обучение)
- 3. 2. Поведение крыс в радиальном лабиринте в условиях неравномерного распределения пищи в коридорах
- 3. 2. 1. Обучение крыс в условиях неравномерного распределения пищи
- 3. 2. 2. Влияние изменения места запуска крыс в радиальном лабиринте
- 3. 2. 3. Влияние изменения объема пищевого подкрепления
- 3. 2. 4. Влияние перестановки коридоров
Структура поведения крыс при поиске пищи в радиальном лабиринте (реферат, курсовая, диплом, контрольная)
Актуальность проблемы. На основе принципов рефлекторной теории, разработанных И. М. Сеченовым, И. П. Павловым и А. А. Ухтомским, на протяжении многих лет у животных изучаются процессы ориентации в пространстве, поисковое поведение и связанные с этими реакциями механизмы памяти. В последнее время появилась тенденция исследовать поведение животных в условиях, как можно больше приближающихся к естественным. Имеет место связь между типом используемой аппаратуры и характером наблюдаемого поведения и, как следствие этого — теми теоретическими представлениями, которые развиваются на основании таких исследований. Так, исходя из экспериментальных данных, полученных в лабиринтах различной степени сложности, было сформулировано весьма авторитетное на протяжении многих лет положение о том, что у обученных крыс поведение в лабиринте определяется исключительно двигательным стереотипом. Однако в дальнейшем выяснилось, что использовавшиеся ранее лабиринты часто не только не моделировали естественную среду обитания, но создавали условия, препятствующие реализации свойственных животным стратегий поведения. Это стимулировало разработку новых схем лабиринтов, в которых без вмешательства экспериментатора животные при поиске пищи осуществляют множество свободных выборов пространственных локаций.
В последние годы все больший интерес физиологов, этологов, генетиков поведения и психофармакологов вызывает детальный анализ, описание и моделирование именно таких форм поведения животных (26, 33). Актуальность подобного рода исследований объясняется тем, что наиболее полное описание поведения (особенно в широко используемых экспериментальных моделях) необходимо для дальнейшего изучения механизмов, лежащих в основе обучения и памяти, для более объективной оценки эффектов оперативных и фармакологических воздействий на мозг. Недостаток детального анализа поведения является одной из причин противоречивости трактовок опытов, проводимых в однотипных условиях разными авторами.
Подходы к анализу поведения могут быть различными. Один из подходов заключается в определении основных закономерностей поведения в различных конкретных ситуациях, в определении общих и частных поведенческих адаптаций, в выявлении роли предшествующего опыта, что позволяет преденазывать характер развития поведения во времени, т. е. прогнозировать поведение. Этот подход не требует сопоставления с механизмами, лежащими в основе поведения. Другой подход состоит в установлении связей между закономерностями поведения и функциональной организацией мозговых структур, т. е. в выяснении механизмов, обеспечивающих протекание определенных адаптивных процессов. Бесспорно, это является конечной целью физиологии высшей нервной деятельности. Однако лишь сведения, полученные в результате анализа закономерностей поведения могут приблизить исследователей к решению основных задач его мозгового обеспечения. Для изучения механизма любого процесса надо знать его сущность. Отсюда вытекает актуальность экспериментального изучения основных закономерностей поведения в условиях применения современных методических и методологических приемов.
Основной методологический принцип, наиболее широко используемый исследователями поведения — системно-структурный. С нашей точки зрения, идеи об элементно-структурных отношениях наиболее соответствуют анализу основных закономерностей поведения. Понятие функциональная структура представляет собой закон связи между функциональными элементами исследуемого явления. «. Функциональная структура оказывается как бы промежуточным звеном между материализованной структурой и структурой, понимаемой как закон.
Наиболее специфичной чертой функциональной структуры является ее чрезвычайно высокая лабильность в рамках устойчивых систем отношений, подвижность и динамичность (39). Именно эти свойства являются наиболее характерными для целенаправленного поведения целого организма в постоянно меняющейся внешней среде.
В самой общей форме структура распадается как бы на две части: субстратную, статическую, отражающую строение, меру неоднородности объекта и на функциональную, динамическую, которая истолковывается как закон (3).
Функция возникает как выражение «гармонии» между целостным образованием и внешней средой. Структура состоит из определенных функциональных элементов, обладающих относительной самостоятельностью, специфической формой деятельности, управления и регулирования в пределах данного уровня организации.
Цель настоящей работы заключалась в исследовании структуры сложного поведения крыс в условиях осуществления множества свободных выборов при поиске пищи. Для решения этого вопроса был разработан ряд новых методических приемов экспериментирования анализа основных элементов поведения.
Основными задачами работы являлось изучение:
1) закономерностей формирования адекватного поведения в симметричном радиальном лабиринте (PJI) у крыс двух линий, отличающихся способностью к обучению;
2) особенностей поведения крыс в условиях изменения пространственной характеристики среды или процедуры опытов;
3) влияния предшествующего обучения в других лабиринтах на характер обучения в симметричном РЛ.
4) влияния объема пищевого подкрепления на динамику совершаемых крысами поведенческих актов.
Научная новизна работы. До сих пор в качестве характеристик поведения крыс в лабиринте использовалось, в основном, число правильных или ошибочных реакций или время выполнения задачи. Нами были разработаны приемы детального анализа поведенческих реакций крыс в условиях сложной экспериментальной модели, позволившие рассматривать поведение как структуру, слагаемую из ряда элементов — поведенческих тактик. Такой подход позволил выявить и описать особенности поведения крыс в различных условиях. Впервые показано, что обучение крыс в РЛ включает несколько этапов, которые отличаются характером и степенью упорядоченности двигательных реакций.
Впервые описаны конкретные перестройки в поведении крыс после изменения условий экспериментов. Эти перестройки заключались или в корректировке одних тактик при сохранении других, либо в появлении новых тактик. Проведен детальный анализ влияния предшествующего опыта на элементы поведения крыс в новых условиях. Показана возможность использования крысами сформированной ранее поведенческой тактики для решения задач в новой ситуации.
Предпочитаемое направление движения в ту или иную сторону исследовалось у одного и того же животного в нескольких лабиринтах и в различных ситуациях. Оказалось для крыс не характерно сохранение одного и того же направления движения в различных условиях.
В работе показано, что при стабильности ориентиров объем пищевого подкрепления не является определяющим в последовательности совершаемых крысами выборов.
Практическая значимость. Разработанный подход к анализу сложных форм поведения может иметь применение в прикладных исследованиях медико-биологического профиля, поскольку позволяет анализировать конкретные изменения структуры поведения в различных условиях, что способствует более объективной оценке эффектов оперативных и фар
— 10 макологических воздействий на мозг.
Результаты опытов, проведенных на крысах линии Крушинского-Молодкиной (КМ), существенны в связи с тем, что крысы этой линии все чаще используются клиницистами-экспериментаторами как экспериментальная модель для исследования природы судорожной активности.
В комплексе с нейрофизиологическими методами, разработанный подход и полученные результаты служат базой для изучения центральных механизмов сложных форм поведения. Положения, выносимые на защиту.
1. Поведение крыс в РЛ имеет сложную структуру, элементами которой являются поведенческие тактики. В процессе обучения происходит смена одной функциональной структуры поиска пищи другой структурой. Выработка адекватной структуры поведения заключается, в частности, в формировании или усилении адекватных ситуации поведенческих тактик.
2. Изменение условий экспериментов влечет за собой изменение структуры поведения, заключающееся как в корректировке применявшихся ранее поведенческих тактик, так и в формировании (или «подборе») новых тактик.
3. Предварительное формирование у крьгс тактики (пространственно-моторная асимметрия) вызывает ускорение проявления ее в новых условиях.
4. Объем пищевого подкрепления не во всех ситуациях определяет последовательность совершаемых крысами выборов.
Работа выполнена на кафедре физиологии высшей нервной деятельности ЛГУ им. А. А. Жданова в 1980;1984 годах.
Научный консультант работы к.б.н.Е.А.РЯЕИНСКАЯ.
I. ОБЗОР ЛИТЕРАТУРЫ.
I.I. Современные представления о поведении крыс в лабиринтах.
Один из известных специалистов по изучению поведения животных Я. Дембовский (16) отмечал, что из работ, посвященных изучению поведения крыс, можно составить болыцую библиотеку. Исследования в данной области проводят сотрудники различных научных школ с разным подходом к рассматриваемым проблемам. Основное внимание уделяется проблеме обучения и памяти. Наиболее часто применяемым методом является метод лабиринта. Этот метод используется отечественными физиологами, но особенно широко он применяется зарубежными этологами и зоопсихологами. При анализе литературных данных, относящихся к исследованию закономерностей пространственного обучения и адаптации крыс к меняющимся условиям, нелегко найти основную нить в массе часто противоречащих друг другу фактов, выводов и мнений. В данной литературной сводке лишь частично представлены те направления и факты, которые, по нашему мнению, имеют отношение к решаемым нами задачам.
Уже в начале XX века лабиринты служили аппаратами для исследования поведения животных, а иногда и людей (140). Как будет показано ниже, характер методики (например, структура лабиринта) непосредственно влияет на поведение, следовательно, и на те теоретические взгляды, которые формируются на основании наблюдений. Экспериментаторы склонны конструировать лабиринты с учетом стоящих перед ними научных проблем, при этом, естественно, не все аспекты поведения животных учитываются.
Имеется два типа лабиринтов. В одних лабиринтах, которые называются «закрытыми», разделение их частей осуществляется с помощью стенок из непрозрачного материала. Другой тип лабиринтов так называемые «приподнятые/' лабиринтыих части разделяются путем поднятия над полом на определенную высоту, что заставляет животное оставаться в лабиринте. Во всех использовавшихся ранее лабиринтах обоих типов, ошибочные — выборы ведут в тупики. В «закрытом» лабиринте это — слепой конец, ограниченный стеной, в «приподнятом» — это конец луча, ограниченный открытым цространством.
При исследовании поведения животных в различных условиях экспериментов обычно определяли только процент правильных или ошибочных реакций в опыте или время выполнения задачи. И. Кречевским (94) был впервые предложен другой подход к анализу поведения крыс. Он описал ряд специфических двигательных реакций у животных (т.е. тенденций перемещаться в определенном направлении при исследовании окружающей среды) и назвал их «гипотезами». Однако взгляды И. Крачевского подверглись резкой критике (139). Длительное время этот подход почти не использовался при исследовании поведения.
В настоящее время зарубежные физиологии, описывая подобные двигательные реакции, называют их «стратегиями» поведения (109). или «гипотезами» (104).
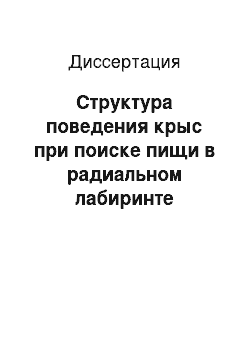
Современные взгляды на поведение животных значительно отличаются от концепций исследователей, начинавших эксперименты в лабиринтах. Эти различия могут быть оценены путем краткого знакомства со старой точкой зрения. Предшественник раннего лабораторного лабиринта бьш сконструирован по схеме лабиринта Хемптон-Корт-ских садов Англии (123). В нем требовалось найти правильный путь от исходной точки снаружи до центральной области, где помещалась пища (рис. 1, I). Лабиринт чаще был «закрытого» типа. В лабиринте тестировались преимущественно крысы, но иногда в качестве подопытных животных использовались обезьяны, лягушки, рыбы, птицы и морские свинки.
РиеЛ. Схемы лабиринтов.
Объяснение в тексте.
С.В.Смолл (127) ввел модифицированный Хемпто-Кортовский лабиринт и тренировал как лабораторных, так и диких грызунов. При оценке этих экспериментов автором были выявлены следующие факты: увеличение скорости реакций при повторении тестов, уменьшение попадания в тупики, автоматический характер движений и ряд эмоциональных реакций. Хотя статья С. В. Смолла включала много важных наблюдений, основным выводом, сделанным на основании этих исследований был «абсолютно автоматический характер движений» после того как животное обучается задаче. После интенсивных тренировок крыса выгладит как деталь хорошо смазанной машины, гладко движущаяся по лабиринту с максимальной скоростью без каких-либо колебаний и отклонений, огибающая все углы, делающая виражи на крутых поворотах (127, 138).
Автоматизм хорошо тренированных крыс стал почти легендарным. В одном эксперименте крыс обучали пробегать закрытый лабиринт, состоящий из серии левых поворотов. Затем один из левых коридоров был перекрыт, а противоположный — открыт. Крысы совершенно не замечали этой перемены и, как указывает Дж.А.Гингерелли (82) яростно врезались в слепую стенку. В другом эксперименте голодные крысы были приучены бегать по прямому коридору за находящимися в конце маленькими кусочками пищи. Затем большая порция еды была положена в середине пути. Все крысы несколько раз бежали, не останавливаясь, мимо большой порции еды, и примерно половине крыс потребовалось более 20 побежек, чтобы начать останавливаться здесь и есть. В третьем эксперименте крыс обучили делать ряд левых и правых выборов. Затем направление правильных выборов было изменено таким образом, что бывшие правильные выборы вели в пустоту. Здесь крысы опять проявляли относительную нечувствительность к переменам и много раз падали вниз (70). Короче говоря, «после тренировок животные в лабиринте могут быть превращены в явно недумающие, консервативные машины» (64, 74).
Итак, был сделан вывод, что при ориентации крыс в лабиринте определяющей является исключительно кинестетическая сигнализация. Роль сенсорных стимулов других модальностей почти полностью отрицалась. Подтверждением данного вывода было отсутствие существенных нарушений в поведении у крыс после либо выключения зрительной, слуховой или обонятельной рецепций, либо создания условий, препятствующих восприятию стимулов: указанных модальностей (125, 136).
Один из наиболее кратких выводов из гипотезы «кинестетической машины» (75) был сделан ее противником (71): «общее предположение, подтверждающее функцию кинестетического аппарата при обучении, заключается в том, что стимулы от мускулатуры возникают как функция некоторой временной последовательности по мере того, как животное тренируется в лабиринте». В процессе обучения эта временная последовательность должна закрепляться. Движение, которое надо совершить, вызывается в нужный момент эфферентными кинестетическими импульсами, порожденными только что сделанным движением.
Гипотеза «кинестетической машины» была подвергнута резкой критике. Положение о том, что исключительно кинестетические стимулы обеспечивают успешную ориентацию в пространстве, чисто логическим путем было опровергнуто почти сразу: «Осознание функциональной ценности кинестетических ощущений и их доминатной роли при обучении чрезвычайно важно. Но тогда тут же встает вопрос — какова роль глаз, ушей и т. д., если не для обучения» (132). Такого же мнения придерживались и ряд других экспериментаторов (95, 82). Действительно, как отмечает Е. К. Толман (130) «крайний периферизм Дж.В.Уотсона» был принят всерьез только несколькими исследователями, изучающими пространственное поведение, да и то только в момент появления теории.
Другая часть теории, касающейся относительной консервативности поведения и тенденции животных каждый раз следовать определенным путем в лабиринте, имела гораздо большее влияние на разрабатываемые теории поведения и послужила причиной ряда разногласий. По мнению Д. С. Олтона (109) этот аспект выдвигается авторами в силу их непосвященности и как наиболее легкое объяснение поведения животных в пространстве.
Указанные выше примеры исследования поведения крыс в лабиринтах приводятся нами не только для изложения истории развития проблемы. Мы не намерены спустя несколько десятилетий, вновь отстаивать крайние позиции гипотезы «кинестетической машины». Однако приведенные результаты опытов, по нашему мнению, до сих пор представляют интерес. Разработка и использование все более сложных лабиринтов с целью исследования, в частности, проблемы памяти, сделало крайне затруднительным анализ и описание характера двигательных реакций животных. Возникла необходимость разработки специальных методических приемов, чтобы выявить определенные тенденции в последовательности совершаемых крысами реакций. Некоторые исследователи (например, Д. С. Олтон (109) предпочли занять позицию, диаметрально противоположную гипотезе «кинестетической машины», и полностью исключить при создании теоретических положений анализ последовательности реакций животных. Такой подход не позволяет полнее раскрыть, во-первых, природу поведения нормальных животных и, во-вторых, особенности поведения животных, используемых как модель патологических нарушений функций мозговых структур.
Следствием указанных выше противоречий является то, что рас-ные авторы определяющую роль в реализации животными адекватного поведения отводят либо формированию" когнитивных карт" (гипотеза места", аллоцентрическая стратегия) либо формированию цепей двигательных реакций (гипотеза «ответа» или маршрутная, эгоцентрическая стратегия), которые описаны далее.
Один из вопросов, который решался при анализе поведения крыс в лабиринтах — повторяется ли у них в ряду побежек трактория движения.
Пример вариабильности реакций крыс был дан Дж.Ш.Дэшиеллом (67). Как показано на рисунке I, 2 лабиринт представлял собой открытую арену, разделенную на коридоры блоками, расставленными в середине и образующими 20 различных путей, которые совпадали по длине ori старта до финиша. Крысы научились выбирать эти кратчайшие пути из прочих: и время побежек и пройденный путь заметно сокращались в течение нескольких первых побежек. После освоения лабиринта, крысы предпочитали не повторять маршруты предыдущих побежек. Одна крыса, например, использовала 13 различных путей в 21 побежке, и за все это время сделала всего 3 ошибки.
К.Бэттиг с соавт.(55) отметили тенденцию крыс исследовать пространственную среду до мельчайших деталей. В их работе крысы при движении по шестиугольному лабиринту, в котором не было пищи (рисЛ, 3), быстро обучались выбирать путь с минимальным числом повторных заходов в одни и те же части лабиринта.
Другой пример исследовательского поведения у крыс был приведен С. А. Барнеттом с соавт.(53, 54), использовавшим «резидентный» лабиринт (рисЛ, 4). В отличие от других экспериментов, в которых животные жили в клетке и находились в лабиринте только во время опыта, здесь крыса оставалась в лабиринте 24 часа в сутки. Гнездо находилось в центральной секции между 4-мя коридорами. Коридоры отличались содержащимися в них продуктами, необходимыми для жизнедеятельности крысы: например, в одном коридоре была вода, в другом — овес, в третьем — пшеница, четвертый — пустой. Был поставлен вопрос: как будет двигаться крыса по коридорам? Общая картина поведения менялась, но превалировало исследование окружающей среды, характеризующееся кратковременными посещениями всех четырех лучей (при этом крыса не потребляла находящихся там запасов). Этот «осмотр» мог повторяться несколько раз перед тем, как крыса останавливалась на какой-либо определенной форме поведения. Результаты этих экспериментов показывают, что у крыс имеет место систематическое исследование даже привычной для них окружающей среды.
В.Н.Дембер, Х. Фоулер и Р. Дне. Дуг л ас (68) в качестве примера разнообразия реакций приводят наблюдаемое ими спонтанное альтернирование у крыс в Т-образном (TJI) или в У-образном (УЛ) лабиринтах. Животные совершали 2 побежки в лабиринте. В 80% случаев во второй раз они выбирали противоположный коридор.
Наряду с этим Дж. Хоффман (85) отмечает наличие у крыс врожденной моторной асимметрии, т. е. предпочтение движения направо или налево, выявленное им при проведении опытов в УЛ. Это не согласуется с положением о спонтанном альтернировании.
Таким образом, в лабиринтах, принципиально не отличающихся друг от друга по степени сложности (рис. 1, 1−3), различные авторы отмечают у крыс две различные тенденции: либо повторять пройденный путь, либо не посещать повторно одно и то же место в пространстве. Однако условия проведения описанных выше опытов были различные, например, длительность обучения крыс, наличие или отсутствие пищи в лабиринте. Значит, преобладание одной из указанных тенденций может определяться условиями экспериментов, и ни одна из них не является универсальной. Кроме того, К. Бэттиг с соавт.(56) и С.А.Бар-нетт с соавт.(54) отмечают только стремление крыс не повторять пройденные локации при «осмотре» лабиринта. Однако авторы не сравнивали траектории побежек крыс, совершенных при многократных «осмотрах» лабиринта. Следовательно, вопрос о том, существует ли какая-то закономерность в последовательности реакций 1фыс при побеж-ках по лабиринту остается открытым. Т. е. нельзя согласиться с Д. С. Олтоном (109), что приведенные примеры являются доказательством отсутствия стереотипных реакций у крыс в лабиринтах.
В работе Е. А. Рябинской и Т. С. Валуйской (37) показано, что в УЛ в условиях спонтанного выбора коридоров в первом опыте крысы чередуют направление побежек, однако в дальнейшем у большинства из них имеет место преобладание побежек либо вправо, либо влево. Приведенные данные свидетельствуют о том, что в одних и тех же условиях у крыс может наблюдаться как вариабильность, так и относительная однотипность реакций.
Интерес представляет сравнение характера поиска пищи животными в природных условиях с поведением в лабиринтах.
Экологи, описывая поведение животных при поиске пищи, используют термин «хищник» и «добыча» (122, 92, 115, 65, 66, 93). Хищник, это любое животное, которое хочет кого-то съесть, а добычаэто любое животное, которое может быть кем-то съедено. Хотя исследовалось множество различных систем «хищник-добыча», наиболее важными для физиологов и психолов являются примеры стратегий «возвращения» (win-stay) и «перемещения» (win-shift) (96). Рассмотрим хищника, который нашел пшцу. Вопрос, встающий перед началом следующих поисков — «вернуться», т. е. разыскать пищу на прежнем месте, или «переместиться» и искать где-либо в другом месте. Примеры обеих стратегий можно найти в природе и в каждом случае стратегия, использованная хищником, по-видимому, обусловлена распределением пищи в среде.
Стратегии «перемещения» следуют птицы, питающиеся нектаром.
А.К.Кэмил (89) изучал пути поиска гавайского вьюрка. Автор сообщил, что после того, как эти птицы посещают цветок, они обычно не возвращаются на него, по крайней мере, в течение нескольких часов. Согласно данным автора, птицы не используют стратегию цепочки ответов (т.е. полет строго в одном направлении), они так же не делают на цветках никаких пометок. Следовательно, они используют стратегию «перемещения», запоминая недавно посещенные цветки.
Среди птиц также можно найти примеры стратегии «возвращения» Дк.Н. М. Смит (126, 127) описывает поисковое поведение английского дрозда, охотящегося за червями и личинками на лугу, после обнаружения добычи строго придерживаясь одного и того же места. СходN ные результаты были получены Р. Зэчем и Дж.Б.Фоллсом (141) на длиннохвостой синице.
Обе стратегии («перемещения» и «возвращения») приурочены к запасу пищи, требующемуся хищнику (137). Цветы, используемые гавайским вьюрком содержат так мало нектара, что птица выпивает его за одно посещение. Так как цветку требуется время для восстановления нектара, оптимальная стратегия гавайского вьюрка искать пищу в других местах, пока запас нектара в данном месте не восстановится. Напротив, черви и личинки, служащие пищей английскому дрозу и длиннохвостой синице, обычно сконцентрированы в одном месте в большом количестве, так что при нахождении одной личинки возрастает вероятность нахождения рядом другой.
Эксперименты, описанные рядом авторов, позволяют предположить, что стратегия поиска у крыс сходна со стратегией гавайского вьюрка, т. е.они имеют тенденцию перемещаться между имеющимися источниками пищи (63, 105, 52, 107). В этом случае можно сделать два предположения о поведении крыс в лабиринте: во-первых, когда крысам предлагают равноценные альтернативы, они предпочитают стратегию «перемещения», во-вторых, крысы должны обучиться стратегии «перемещения» скорее, чем стратегии «возвращения» .
В экспериментах по проверке этих предположений использовался лабиринт «три стола» (98). Три стола были соединены с центральной платформой, где должен был производиться выбор (рис. 2, I). Голодное животное помещали на один из трех столов, где оно получало пищу. Затем экспериментатор переносил крысу на стартовый стол. Крыса оказывалась перед выбором: вернуться на стол, куда она была посажена первоначально или идти на другой стол. Возвращение расценивалось как применение стратегии «возвращения», выбор другого стола — стратегии «перемещения». И стол, на который крысу помещали для еды, и стартовый стол меняли от теста к тесту в случайном порядке, и каждый раз крыса должна была помнить стол, на который ее поместили первоначально, чтобы адекватно отреагировать. Результаты подтвердили оба предположения, сделанные выше: во-первых, крысы, получавшие подкрепление при выборе любого из 2-х столов, предпочитали стратегию «перемещения», т. е. выбор того стола, где они еще не быливо-вторых, крысы, получавшие подкрепление за выбор стола, на который их раньше не помещали, обучались стратегии «перемещения» быстрее, чем группа крыс, награждавшаяся за возвращение на стол, на котором они были в начале эксперимента. Д. С. Олтон и П. Шлосберг (108), также считают, что крысам свойственна стратегия «перемещения». После обнаружения пищи в одном месте крысы продолжают поиски в других пространственных локациях, независимо от того, полностью ли истощились найденные ими ресурсы. Авторы считают, что высокий уровень выполнения крысами пространственных задач, в которых при поиске пищи они должны перемещаться, объясняется соответствием поставленной задачи поисковой стратегии, предпочитаемой данным видом животных.
Рис. 2. Схемы лабиринтов.
Объяснение в тексте. I I.
— 23 — 23.
В.Н.Дембер и Х. Фоулер (68, 77) считают, что решению таких задач способствует сильно выраженная тенденция крыс к спонтанному альтернированию.
Е.А.Гаффан и Дж. Девис (78) в целях решения этой проблемы поставили серию экспериментов. Они использовали четырехлучевой PJI. В первой серии опытов доступ был открыт только в два коридора лабиринта, которые в зависимости от условий эксперимента могли содержать или не содержать пищу. Затем, после интервала, животному разрешалось осуществить еще два выбора из 4-х возможных, причем в различных сериях подкреплялись либо два еще не посещенных, либо два уже посещенных в первой половине опыта коридора. В другой серии крысы заходили в два коридора, только один из которых содержал подкрепление, последующий выбор осуществлялся между теми же коридорами, но пища находилась или только в ранее подкреплявшемся коридоре, или только в ранее неподкреплявшемся. Основные выводы работ В. Н. Дембера и Х. Шоулера (68) и Е. А. Гаффана и Дж. Девиса совпадают. Наблюдаемое у крыс перемещение в пространстве при решении ряда задач можно объяснить тенденцией к спонтанной альтернации. Кроме того, в работе Е. А. Гаффана и Дгк. Девиса было обнаружено, что альтернирование усиливается после неподкрепленияпри увеличении интервала между выборами степень альтернирования уменьшается, а в некоторых условиях крысы предпочитают использовать стратегию «возвращения» .
Эксперименты Д. С. Олтона (105) демонстрируют зависимость степени выраженности альтернации от новизны объектов исследования. Крысам, лищенньзм воды, позволялось входить в 2 коридора трехлучевого лабиринта, причем только один из них содержал воду. В дальнейшем из 3-х коридоров крысы чаще всего выбирали незнакомый (доминирование процесса исследования обстановки), но из 2-х знакомых коридоров предпочитали тот, в котором находили воду. Как было показано выше, на основании ранних экспериментов с использованием лабиринтов, вццелялась роль поведенческих стереотипов. В противоположность им, в более поздних работах многих авторов ¦- акцентируется внимание на лабильности поведения. Это особенно характерно для экспериментов, связанных с исследованиями «когнитивных карт» (cognitive map). Сформировалось два различных подхода исследования и интерпретации поведения. Сторонники одного подхода («гипотеза маршрута») считают, что для объяснения процесса обучения в лабиринте необходимо выяснить какие реакции должны быть осуществлены на соответствующие раздражители или какие раздражители определяют данные реакции. По их мнению обучение в лабиринте сводится к запоминанию отдельных поворотов: у животного, освоившего лабиринт, вырабатывается фиксированная последовательность движений от исходной точки к цели. Они особо подчеркивают роль кинестетических раздражителей, как факторов, ответственных за интеграцию поведения. Сторонники другого подхода считают, что обучение в лабиринте основано на общей ориентации, на формировании «мысленной схемы» лабиринта, «когнитивной карты» (не топографической, а топологической), т. е. знания того, «что куда ведет», или вероятности следования друг за другом определенных раздражителей. Сторонники теории «познания» («когнитивных карт») особое значение придают перестройке центральных нервных процессов, причем, как они полагают, эти процессы отличаются от тех, которые имеют место при запоминании отдельных поворотов.
Различие подходов к исследованию поведения привело к возникновению спора «место против ответа» (place-versus-responce) (см. обзор Ф. Рестли (116). Суть этого спора можно объяснить на примере. Крысу тренируют вТЛ поворачивать направо. Возможны две различные стратегии. Одна из них эгоцентрическая («субъективная»), основанная на соотношении между расположением лучей и положением тела животного. Такая стратегия была названа «стратегией ответа» (responce): животное обучается повороту направо в точке выбора. Другая стратегия — аллоцентрическая («объективная») — основана на ориентирах, не связанных с животным. Эта стратегия была названа «стратегией места» (place): животное определяет место, где находится правый рукав. Две стратегии основаны на двух разных видах пространственной памяти: эгоцентрической, когда местонахождение запоминаемого стимула может определяться только по отношению к местонахождению самого животного, и аллоцентрической, когда запоминается система внешних ориентиров, необходимых для ориентации. Эгоцентрическая стратегия соответствует «маршрутной гипотезе» (таксонная гипотеза), а аллоцентрическая стратегия — «когнитивным картам» (локальная гипотеза) (104).
Способом определения стратегий «места» и «ответа» был тест переноса в «плюс» — лабиринте, который имел 2 стартовых коридора (один напротив другого). Сначала крыса обучается следовать из одного стартового коридора в один целевой коридор. Затем проводился тест переноса, в котором крыса начинала побежку из противоположного коридора. Если в первоначальном месте при обучении использовалась «стратегия ответа», крыса должна была бы сделать такой же поворот в тесте переноса и, таким образом, закончить побежку в другом луче. С другой стороны, если в первоначальном варианте крыса обучалась, используя «стратегию места», тогда она должна была прийти в тот же коридор в тесте переноса, но сделать при этом противоположный поворот. На верхней половине рисунка 2, 3 показаны два взаимоисключающих варианта, которые можно предсказать на основе «гипотезы места» или «гипотезы ответа» .
Следует ли из этого, что крысу можно приучить пользоваться •в «плюс» — лабиринте стратегией места, путем пищевого подкрепления за правильный выход к цели, независимо от того, какой коридор был стартовым? Хотя с первого взгляда можно сделать такое заключение, дальнейшие рассуждения показывают, что оно неправомерно. Действительно, животное можно обучить" стратегии места: приходить к цели, независимо от места старта. Но равноценной альтернативой будет обучение животного двум ответным стратегиям: когда побежка начинается из одного коридора, крыса сворачивает направо, когда из другогоналево (57, 117, 118). Единственный способ различить эти две альтернативы — применение другого теста переноса, представленного в нижней половине ~ рисунка 2, 3. Если крыса обучилась различению места, она должна прийти в точку У в тесте переноса. Если она обучилась совершать определенный поворот, ее выбор будет случайным.
Возможность формирования «когнитивных карт» Е. К. Толман (131) изучал в лабиринте «восходящее солнце» (рис. 2, 2). И лабиринт и сам эксперимент состоял из 2-х частей. Сначала крысы тренировались бегать по части лабиринта, обозначенной на схеме штриховкой. На этой стадии перед ними не стояло проблемы выбора, они просто следовали единственным возможным путем от старта к финишу. После того как завершились тренировки, привычный путь перекрывали, а пути в другие лучи открывали, т. е. перед крысой ставилась проблема выбора. Е. К. Толман предсказал, что крысы будут выбирать луч, ориентированный в направлении цели, т. е. они усваивают пространственные отношения между стартом и финишем, и могут выбирать кратчайший путь, чтобы добраться до цели. Согласно его данным, даже при первой попытке, большинство крыс выбирало лучи, ориентированные в направлении цели. Хотя этот эксперимент часто цитируется как классический в доказательство способностей крыс к составлению «когнитивных карт», этот пример неудачен. Во-первых, результаты не смогли повторить ряд исследователей (79, 80). Во-вторых, здесь имелся логический просчет в предположении о характере поведения крыс. Предсказать правильный выбор в этих условиях очень трудно.
В связи с проблемой «когнитивных карт» Дж.А.Уолкер и Д.С.Ол-тон (133) проводили эксперименты в «приподнятом» лабиринте, состоявшем из сети стартовых коробок, связанных между собой (рис. 2, 4, А, В, С и Д) и финишных коробок. В первой серии опытов крыс, стартующих из 3-х различных коробок, обучали приходить в центральную финишную коробку, где находилось пищевое подкрепление. После обучения этой задаче, каждую крысу сажали в 4-ю стартовую коробку для проведения теста переноса. Крысы никогда ранее не были в этой части лабиринта и никогда не пересекали пути от соседних стартовых коробок к цели. Уже в первых нескольких тестах переноса около 80% крыс делали правильный выбор. Таким образом, крысы, по мнению Дж.А.Уолкера и Д. С. Олтона, — усваивали не три различных типа побе-жек (от каждой из 3-х стартовых коробок), а общий принцип поиска центральной коробки, с помощью которого они могли приспосабливаться к новым местоположениям старта. Результаты второй серии опытов подтвердили это заключение. В этой серии крыс обучали двигаться в оцределенном направлении, например, к вершине схемы (см. рис.2, 4), В остальном процедура сохранялась. Когда животным давался тест переноса, они, обычно, выбирали коридор, который вел в нужном направлении. Авторы подчеркивают, что правильные действия в тесте переноса не были вызваны какими-либо характеристиками самого теста, а обусловливались предыдущим опытом крыс. Вопрос о том, что является определяющим при ознакомлении крыс с обстановкой — усвоение животным соотношения между деталями лабиринта либо независимо от собственной ориентации (аллоцентрическая стратегия), либо относительно положения своего тела (эгоцентрическая стратегия) — решал П. Эллин с соавт.(73). С этой целью автор использовали описанную выше методику «три стола» Н.Р. Ф. Майера (98). Полученные ими данные подтверждают точку зрения об улавливании крысами пространственного соотношения между деталями лабиринта, т. е. о формировании у них «когнитивной карты» .
В последние годы положение о «когнитивных картах» интенсивно разрабатывается Дж. О'Кифи и Л. Нэделом (99). Авторы провели сравнительное исследование характеристик, соответствующих «гипотезе карт» и «гипотезе маршрутов». Основой их понимания карт является поведенческая лабильность.
По мнению Д. С. Олтона (109) эксперименты, проводимые в связи с проблемой «когнитивных карт», важны, т.к. они позволяют раскрыть способности животного, которые обычно игнорируют зоопсихологи.
Однако, по нашему мнению, увлечение гипотезой «когнитивных карт» привело к тому, что до минимума сводится роль' эгоцентрической памяти в организации поведения животных в пространстве. Нет оснований отрицать возможность определения местонахождения запоминаемого стимула во многих ситуацих не только по отношению к какой-либо системе внешних ориентиров, но и по отношению к местонахождению самого животного. В связи с этим интерес представляют проведенные Т. А. Натишвили (30) исследования эгоцентрической памяти. По сути методика аналогична описанному выше «плюс» -лаби-ринту. В экспериментальной камере было две кормушки и два стартовых домика, расположенных напротив друг друга по обеим сторонам от кормушек (на одинаковом расстоянии от них). Крыса выходила из стартового домика и съедала часть пищи из одной кормушки (вторая была пустой). Затем ее переносили в симметричный стартовый домик. Она должна была определить местонахождение оставшейся пищи. Показано, что крысы способны решать задачу на базе эгоцентрической памяти. Причем при отсутствии кинестетической и зрительной информации эти реакции могут осуществляться на базе вестибулярных стимулов.
Итак, начало истории исследования поведения крыс ознаменовалось описанием их стереотипных реакций в лабиринтах. Дальнейший прогресс этой проблемы заключался в развитии гипотез о роли комплекса или списка ориентиров в формировании адекватного поведения. Большинству гипотез, вьщвигаемых различными авторами, свойственна ограниченность, что, очевидно, в первую очередь связано с трудоемкостью проведения одним коллективом комплексных исследований поведения в различных аспектах. Одни авторы акцентируют внимание на анализе двигательных реакций, другие на выявлении информативных признаков среды. Несомненно перспективным является гармоничное слияние этих двух направлений экспериментальных исследований различных сторон одного и того же явления.
Дальнейшее исследование закономерностей поведения животных требует разработки новых схем лабиринтов, соответствующих поставленным задачам.
ВЫВОДЫ.
1. В PJI в поведенческом континууме крыс выделены поведенческие тактики: посещение более удаленных друг от друга коридоров, ПМА, многократное посещение одного и того же коридора в опыте, повторное посещение коридора при одном промежуточном выборе другого коридора, преобладание посещения более подкрепляемых коридоров в начале опыта, повторное посещение коридора после 11-ти выборов других коридоров, сохранение постоянной последовательности посещения нескольких коридоров в ряду опытов («цепочки»).
2. Крысы линии В в PJI обучаются лучше, чем крысы линии КМ. В период обучения у крыс линии В имеют место две тактики: многократное посещение одного и того же коридора в опыте и повторное посещение коридора при одном промежуточном выборе другого коридора. У крыс линии КМ эти тактики отсутствуют. У обученных крыс линии В сильнее, чем у обученных крыс линии КМ, выражены две другие тактики: ПМА и посещение более удаленных друг от друга коридоров.
3. При изменении пространственной характеристики среды или процедуры опытов у крыс линии В со второго опыта формируется адекватное поведение, а крысы линии КМ в течение длительного времени не решают задачу. У крыс линии В, в отличие от крыс линии КМ, происходит как корректировка использовавшихся ранее, так и формирование (или «подбор») новых поведенческих тактик.
4. Предварительное формирование у крыс ПМА вызывает ускорение проявления этой поведенческой тактики в новых условиях.
5. В ситуации неравномерного распределения пищи при обучении крыс в РЛ и при изменении процедуры экспериментов в начале опыта крысы чаще посещают коридоры с большим количеством пищи. У обученных животных стабилизация условий проведения экспериментов приводит к ослаблению этой тактики.
ЗАКЛЮЧЕНИЕ
.
В работе, во-первых, исследовалась структура поведения животных, во-вторых, осуществлялось сопоставление структуры поведения с его результативностью. Под результативностью понимается получение максимального количества пищи с наименьшей затратой энергии и времени (меньшим числом бесполезных двигательных реакций) .
Для исследования природы поведения крыс в условиях множественного выбора мест подкрепления в РЛ необходимым является определение роли обонятельных ориентиров. Ряд авторов (106, 141, 99, 59, 60, 62, 101, 100) исследовали значение запаха пищи и оставленных животными следов при выполнении ими задач в РЛ. Опыты проводили в условиях выключения обонятельной рецепции, отсутствия пищевого подкрепления, пропитывания РЛ сильным запахом, замены РЛ в середине опыта на идентичный РЛ. Было показано, что обонятельные ориентиры не являются определяющими при выполнении крысами задач в РЛ. Тот же вывод был сделан Е. А. Рябинской (38) на основании экспериментов, проведенных в РЛ, используемом в данной работе. Автор исследовала поведение крыс при выключении обонятельной рецепции по методике Дж.Р.Албертса и Б. Г. Галефа (51).
ОИР животных в различных условиях является предметом изучения многих зоопсихологов и физиологов (15, 48, 42, 27, 84, 112, 138, 90, 135, 114, 81). При исследовании ОИР крыс в «открытом поле» было показано, что их двигательная активность не полностью хаотична, а характеризуется некоторой структурированностью (32, 26, 18). В этом случае авторы изучали последовательность действий, происходящих не одновременно, т. е. сменяющих друг друга различные поведенческие акты и позы.
В нашей работе проводилась формализация поведенческих актов, протекающих одновременно, например, тактика посещения более удаленных мест подкрепления и ГШ. Поведение крыс в РЛ мы рассматриваем как структуры, основой которой является комплекс элементовповеденческих тактик. Однако тактики, в свою очередь, являются подсистемами. При анализе тактик в качестве элементарной единицы рассматривался комплекс реакций, имеющих место в период от момента выхода крыс из одного коридора до входа в другой коридор. Например, крыса зашла в коридор, который находится справа под углом 150° относительно коридора, из которого она перед этим вышла. В данном случае изучалась последовательность действий во времени, т. е. последовательность выборов, осуществляемых крысой в течение опыта. В данной работе не проводился анализ двигательных реакций животных на различных этапах в период между выходом из одного коридора и входом в другой.
Проведенные эксперименты позволили выявить, что в сложных условиях радиальносимметричного лабиринта при равномерном распределении пищи в коридорах уже в первых опытах (первый этап — «перцептивное» обучение) ОИР крыс характеризуется определенной структурой. Упорядоченность поведения проявляется, в частности, в тенденции посещать более удаленные коридоры (чаще под углом 150°). Однако указанные реакции не жестко фиксированы, они имеют вероятностный характер. Такая структура ОИР способствует тому, что крысы последовательно обследуют отдельные сектора РЛ, а не хаотично перемещаются по всему РЛ. Относительно биологического смысла данной упорядоченности реакций можно высказать следующие предположения. Во-первых, тенденция перемещаться в РЛ в определенной последовательности позволяет крысам каждый раз совершать выбор не из всех 12-ти коридоров, а только из тех, к которым крыса выходит на платформу. Вовторых, упорядоченность ОИР животных облегчает выявление актуальных характеристик среды, от которых зависит успешность действия и формирование соответствующей программы поведения (7).
Перцептивным" обучением мы называем совокупность процессов, обеспечивающих обучение восприятия стимулов среды, необходимое для различения объектов, что предваряет выделение актуальных (значимых) признаков среды и увеличивает готовность или способность организма формировать адекватные реакции в новой обстановке или при изменении ситуации. Предложенное нами определение несколько перекликается с характеристикой «перцептивного» обучения, данной Р. Хайндом (47) на основании обобщения ряда работ.
Упорядоченное поведение крыс в PJI, без повторения пройденных мест, может способствовать «перцептивному» обучению, но в данных условиях этого не достаточно для оценки прогнозируемого результата (получение пищи). Об этом свидетельствуют итоги серии опытов, в которых крысы линии В обучались «пассивно» (в «навязывающем» РЛ). При предоставлении им возможности осуществлять свободные выборы они не решали задачу. О том, что животные в условиях «пассивного» посещения коридоров проходили первый этап обучения («перцептивное»), свидетельствует появление у них уже в первом опыте в условиях свободного выбора двух тактик: многократное посещение одного и того же коридора и повторное посещение коридора при одном промежуточном выборе другого коридора. У крыс контрольной группы линии В, которые сразу обучались в условиях свободных выборов, эти две тактики появились только в 5−6-м опытах. После использования этих тактик у них наблюдалось резкое уменьшение числа ошибок.
Указанные две тактики мы рассматриваем как элементы второго этапа упорядоченного ОИР у крыс линии В. Они обеспечивают животным определение основного условия экспериментов: в однажды посещенном коридоре пищи больше нет. Первый и второй этапы ОИР являются началом обучения крыс в РЛ. На третьем этапе обученияя в симметричном РЛ имело место формирование или усиление проявляющихся ранее поведенческих тактик (посещение более удаленных коридоров и ПМА), т. е. возрастание упорядоченности поведения крыс.
У крыс линии КМ не было тактик многократного посещения в опыте одного и того же коридора и повторного посещения коридора при одном промежуточном выборе другого коридора, т. е. тактик, обеспечивающих систематизацию «проб и ошибок». Эти крысы хуже, чем крысы линии В, решали задачу после длительного обучения и поведение у них было менее упорядоченным (меньше выражены две основные тактики: посещение более удаленных коридоров и ПМА).
Следовательно, обучение крыс линии В в РЛ включало три этапа: «перцептивное» обучение, определение условий достижения ре^льтата и формирование оптимального поведения.
Распределение пищи в РЛ в течение опыта было детерминировано последовательностью осуществляемых крысой выборов. Вероятностная упорядоченность их движения создавала вероятностную упорядоченность распределения пищи, что облегчало нахождение непосещенных коридоров в РЛ.
Итак, у крыс линии В намечен цикл взашлосвязанных компонентов обучения: упорядоченность движения способствует выделению актуальных характеристик среды (ориентиры и условия получения пищи), что, в свою очередь, способствует усилению упорядоченности движений, которое облегчает решение задачи.
У крыс линии В формируется поисковое поведение, имеющее определенную структуру. Вначале они как бы проверяют «гипотезу» возможности многократного получения пищи в одном и том же коридоре (ОИР). Эта структура состоит, по крайней мере, из двух взаимосвязанных элементов (две указанные выше тактики «проб и ошибок»). После обнаружения неадекватности данной структуры поведения, у них формируется новое поведение, обеспечивающее упорядоченный поиск пищи, распределенной в коридорах РЛ. Этой ситуации соответствует структура, элементами которой являются две другие тактики: последовательное посещение более удаленных друг от друга коридоров и ПМА. Усиление этих тактик или их формирование у ряда крыс на третьем этапе обучения, по-видимому, определяется условно-рефлекторными механизмами. Формирование данной структуры. поиска пищи обеспечивает оптимизацию поведения крыс линии В.
У крыс линии КМ не происходит формирования упорядоченной ОИР, как у крыс линии В, что затрудняет определение актуальных характеристик среды и выработку адекватных этой среде двигательных навыков. Их поведение после длительного обучения более хаотично, т. е. менее экономично, менее эффективно.
При обучении животных существенное значение имеет их предшествующий опыт, примером чего является, во-первых, большая упорядоченность реакций в новой ситуации у животных, предварительно обучавшихся в других условиях. Так у крыс линии В, предварительно обучавшихся в УЛ и в КТЛ, либо в «навязывающем» РЛ, ПМА в симметричном РЛ проявляется быстрее, чем у животных, ранее не использовавшихся в экспериментах. Во-вторых, прошлый опыт способствует ускорению выявления актуальных характеристик среды, определяющих результативность действия. В экспериментах с вращением РЛ во втором периоде крысы быстрее обучались решать задачу, чем в первом. Эти примеры являются экспериментальным доказательством того, что в новых условиях при формировании адекватных реакций крысы используют элементы поведения, выработанного у них ранее в иной ситуации.
До сих пор рассматривался процесс обучения животных, но интеpec представляет также изучение соотношения сформированной у крыс ранее структуры поведения и новой ситуации, возникшей при изменении какой-либо характеристики РЛ или процедуры опытов. В «асимметричном» и «навязывающем» РЛ и в серии «циклы» все основные части РЛ и главное условие эксперимента (при осуществлении 12-ти выборов в посещенном коридоре пища отсутствует) сохранялись. Несмотря на это, вначале в «асимметричном» и «навязывающем» РЛ у всех крыс наблюдалось снижение уровня выполнения задачи. Имело место рассогласование сформированной ранее программы движения и новой среды. Однако у крыс линии В в новых условиях быстро происходило либо изменение сформированной ранее структуры реакций (например, в «навязывающем» РЛ (30°) тактика посещения более удаленных друг от друга коридоров меняется на противоположнуюкрысы выбирают преимущественно расположенные рядом коридоры), либо усложнение структуры по-• ведения (например, в серии «циклы» появляется новая тактика: повторное посещение коридора в среднем после П-ти выборов других коридоров). Иными словами перестройка поведения в соответствии с изменившимися условиями состоит, в частности, в «подборе» или формировании новых тактик, или в корректировке тактик, применявшихся ранее. Эти процессы, в частности, обеспечивают высокую пластичность поведения крыс линии В.
Поведение крыс линии КМ характеризовалось инертностью. Их поведение в симметричном РЛ было менее упорядоченным, чем у крыс линии В. Несмотря на это, реакции, выработанные у крыс линии КМ в симметричном РЛ, сохранялись длительное время в новых условиях, которым они теперь уже не соответствовали. Так, в «навязывающем» РЛ (30°) в свободных выборах они продолжали посещать коридоры расположенные в противоположной части лабиринта. В тех же условиях, где реализация прежних реакций была затруднена («асимметричный» .
PJI), у крыс линии КМ они не проявлялись, но в течение длительного времени не формировалась и новая структура поведения, адекватная ситуации.
Следует отметить, что только наличие тактик, соответствующих ситуации, не обеспечивает адаптивности поведения. Например, в «навязывающем» РЛ (150°) «переноса» тактик из прежних условий оказалось недостаточным. Крысы линии КМ в течение длительного времени не решали задачу. Следовательно для формирования адекватного поведения животных недостаточно иметь соответствующие тактики, необходима их адаптация к новым условиям ситуации.
Итак, только на основании сформированных моторных навыков не возможна реализация адекватного поведения в данных условиях, что подтверждают результаты опытов с вращением РЛ. В течение опыта происходит оценка совершенных действий. 0 запоминании обученными крысами коридоров (посещенных или непосещенных) свидетельствует распределение ошибок в опыте, отличающееся от модели случайных выборов, причем, крысы лучше запоминают первые выборы. Контролирование степени соответствия применяемых тактик новой ситуации проявляется в уменьшении выраженности тенденции посещать коридоры под углом 150° в конце каждого опыта.
Приведенные в нашей работе результаты экспериментов свидетельствуют о необходимости детального анализа двигательных реакций для исследования природы целенаправленного поведения животных. Простое вычитание предполагаемого эффекта стереотипных реакций животных из суммы правильных реакций, как это пытаются делать некоторые авторы (58), вряд ли позволит выявить абсолютное значение только «образа» среды (или «когнитивных карт») для формирования адекватного поведения. Движение животных и формирование у них «образа» среды — два взаимозависимых процесса. Отсюда следует, что спор о том, что является определяющим: формирование «когнитивных карт» (гипотеза «места», аллоцентрическая стратегия) или формирование цепей двигательных реакций (гипотеза «ответа», маршрутная, эгоцентрическая стратегия (116, 104, 109, 129), — не имеет смысла. Конечно, в определенных условиях может преобладать либо алло-, либо эгоцентрическая стратегия (III). Однако это относительное доминирование в частных случаях. Поведение во всей его сложности невозможно описать с помощью только одной из этих гипотез.
К референтной памяти следует относить не только запоминание животными ориентиров в окружающей среде и условия получения подкрепления, но и запоминание сформированной у них системы двигательных реакций. Референтная память является сложной системой. Нарушение в одном из элементов этой системы приводит к нарушению поведения в целом, что наблюдалось, например, в сериях опытов с различным объемом подкрепления. Изменение места запуска крыс в РЛ нарушало у них цепь двигательных реакций, а изменение объема подкрепления вызывало несоответствие прогнозов реальным результатам. В обоих случаях крысы начинали посещать неподкрепляемые коридоры, т. е. поведение стало менее адекватным и экономичным. Возникла ОИР, необходимая для формирования программы поведения, адекватной новому «образу» среды.
Полученные в нашей работе результаты опытов подтверждают данные, полученные С. Х. Хулси с соавт. (87, 76, 88) относительно того, что крысы дифференцируют различные объемы пищи, и в соответствии с этим у них может формироваться определенная последовательность посещения мест подкрепления. Однако это только частный случай. Мы показали, что в условиях стабильности ориентиров в сложной экспериментальной модели четкого соответствия последовательности выборов коридоров объему пищи не наблюдалось. Преобладала другая тактика посещение более удаленных коридоров. Однако при изменении условий (места запуска крыс в РЛ или объема подкрепления) крысы меняли тактику: они в первых выборах начинали чаще посещать более подкрепляемые коридоры. Продолжение опытов в новых условиях вновь приводило к ослаблению тактики посещать более подкрепляемые коридоры.
Таким образом, в структуре поведения крыс в РЛ было выделено несколько тактик: посещение более удаленных коридоров, ПМА, многократное посещение одного и того же коридора в опыте, повторное посещение коридора при одном промежуточном выборе другого, преобладание посещения более подкрепляемых коридоров в начале опыта, повторное посещение коридора после 11-ти выборов других коридоров, сохранение постоянной последовательности посещения нескольких коридоров в ряду опытов («цепочки»). Тактики жестко не были фиксированы, так как их реализация зависела от условий среды.
Тенденция посещать более удаленные друг от друга в пространстве места подкрепления, очевидно, присуща крысам и, возможно, является генетически детерминированной, так как проявляется у всех животных уже в первых опытах. Однако эта тактика жестко не была фиксирована. В процессе обучения в зависимости от ситуации она либо сохранялась на уровне первых опытов (неравномерное распределение пищи в РЛ), либо усиливалась (равномерное распределение пищи в РЛ). При изменении условий эта тактика могла меняться на противоположную, т. е. крысы чаще посещали соседние коридоры («навязывающий» РЛ (30°) — в ситуации неопределенности указанная тактика отсутствовала (перестановка коридоров в экспериментах с неравномерным распределением пищи в РЛ).
ПМА в начале экспериментов во всех трех лабиринтах (УЛ, КТЛ и РЛ) у одних животных отсутствовала, а у других была выражена слабо. В процессе обучения она, соответственно, появлялась или усиливалась. Степень ее выраженности зависела от условий. Например, у обученных крыс в РЛ Кас был высокий в ситуации равномерного распределения пищи и низкий — в ситуации неравномерного распределения пищи. Изменение условий вызывало как уменьшение ПМА («навязывающий» РЛ — 30°, изменение места запуска крыс в РЛ при неравномерном распределении пищи, перестановка коридоров), так и ее увеличение (изменение объема пищи при неравномерном ее распределении в РЛ). Предварительное формирование ПМА в одних условиях ускоряло ее проявление в новой ситуации, где применение этой тактики адекватно (например, в симметричном РЛ после обучения в КТЛ или в «навязывающем» РЛ). Этот факт, а также усиление ПМА в процессе обучения в трех лабиринтах (УЛ, КТЛ и РЛ) и совпадение у большинства крыс направления движения в УЛ в первой и во второй серии, проведенной после экспериментов в КТЛ и РЛ, свидетельствует о том, что тенденция к проявлению ПМА определяется механизмами обучения и памяти.
Тем не менее у крыс не наблюдалось совпадение предпочитаемого направления движения в различных условиях. Тенденция к проявлению ПМА, возможно, генетически детерминирована. Однако эта тактика жестко не фиксирована. ПМА как поведенческая тактика, вероятно, формируется в конкретных условиях на базе прошлого опыта и оценке текущей ситуации. Механизмы ПМА нами не изучались.
Ряд авторов исследовали направление вращения крыс на плоскости или в сферическом пространстве (ротационная асимметрия), предпочтение передней конечности при доставании пищи или ПМА в TJI или УЛ (44, 113, 85, 83, 121). Авторы показывают, что основой асимметрии наблюдаемых реакций является функциональная межполушарная асимметрия или нейрохимическая асимметрия нигростриарной системы, или оба механизма вместе (см.обзоры: 12, 134). Однако Дж.А.Уолкер
134), обобщая накопленный многими исследователями экспериментальный материал, отмечает, что направление предпочтения, степень его выраженности и постоянство варьируют в зависимости от задачи, предъявляемой животному. Он считает, что предпочтение лапы не следует рассматривать как несомненный признак проявления доминирования полушария.В. Х. Денинберг (69) на основании своих и ряда работ других авторов предположил, что в стрессовых условиях или в новой обстановке межполушарная специализация не наблюдается.
Известно, что феноменологически сходное поведение может осуществляться за счет различных механизмов (I). В приведенных выше примерах авторы рассматривали различные, большей частью простые, реакции у животных, отличающиеся от тех, которые описаны в нашей работе. Общее здесь — только проявление асимметрии двигательных реакций. Кет оснований считать, что механизмы этих реакций однотипны. Можно предположить, что основой тенденции к появлению ПМА является динамическая функциональная межполушарная асимметрия (12, 43) или нейрохимическая асимметрия структур мозга (83). В отношении последнего можно высказать следующее предположение, что нейрохимическая асимметрия также может быть динамична. Этот вопрос остается открытым. К настоящему времени нет еще достаточно исчерпывающих данных, разделяемых большинством физиологов, о механизмах возникновения не только ПМА в сложных ситуациях, но и предпочтения конечностей и вращения животных в одном направлении на плоскости, или сферическом пространстве. Различие в степени выраженности ПМА. у крыс линий В и КМ, возможно, является следствием меньшей межпо-лушарной асимметрии у крыс с высоким уровнем судорожной готовности (49, 37). х X X.
Таким образом, поведенческие тактики представляют собой определенные закономерности в последовательности действий животных при осуществлении целенаправленного поведения:
1) поведенческие тактики искусственно идентифицируются экспериментатором в континууме поведенческих реакций;
2) поведенческие тактики имеют вероятностный характер и описываются с помощью статистических методов;
3) животные при реализации сложных форм поведения могут использовать одновременно несколько поведенческих тактик;
4) поведенческие тактики могут появляться на определенном этапе обучения или иметь место на всем протяжении экспериментов;
5) у обученных животных при изменении условий экспериментов наблюдается как корректировка применявшихся перед этим поведенческих тактик, так и появление новых поведенческих, тактик, что, в частности, обеспечивает пластичность их поведения;
6) прошлый опыт может влиять на степень выраженности поведенческих тактик или на момент появления их в процессе обучения.
Поведение животных в РЛ имеет сложную структуру, элементами которой являются, в частности, поведенческие тактики. Тактики относительно независимы друг от друга. Так изменение условий вызывает переинтеграцию сформированной системы поведения, при этом одна тактика может усиливаться, а другая ослабевать или сохраняться на прежнем уровне. Однако в конкретных условиях все тактики, составляющие структурную основу поведения, взаимосвязаны и представляют собой единый континуум двигательных реакций. В сложных экспериментальных ситуациях выработка адекватной структуры поведения происходит путем формирования (или «подбора») соответствующих тактик на основании выявления актуальных характеристик среды (ориентиров и условий достижения прогнозируемого результата).
Список литературы
- Александров Ю.И., Гринченко Ю. В., Хвастунов P.M. Иерархическаяорганизация поведения. Успехи физиол.н., 1980, II, 4, 115—144.
- Анохин П.К. Биология и нейрофизиология условного рефлекса. М., 1. Медицина, 1968.
- Астафьев А.К., Батуев А. С. Некоторые методологические аспектыструктурно-функциональной организации деятельности мозга. В сб.: Некоторые философские вопросы современного естествознания. Л., ЛГУ, 1973, I, 123−136.
- Аткинсон Р. Человеческая память и процесс обучения. М., Прогресс, 1980.
- Батуев А.С. 0 функциональной структуре двигательных актов в пространственной ориентировке животных. Автореферат дисс. на соискание учен. степени кандидата биол.наук. Л., I960.
- Батуев А.С. Функции двигательного анализатора. Л., ЛГУ, 1970.
- Батуев А.С. Программирование целенаправленного поведения и ассоциативные системы мозга. ?изиол.ж.СССР, 1980, 66, 5, 629−640.
- Батуев А.С. Условный рефлекс и высшая нервная деятельность.
- Вест.Ленинградского ун-та, сер. биология, 1981, 4, 21, 7−14.
- Бериташвили И.С. Память позвоночных животных, ее характеристика и происхождение. М., Наука, 1974.
- Бернштейн Н.А. Очерки по физиологии движений и физиологии акктивности. М., Медицина, 1966.
- Бернштейн Н.А. 0 построении движений. М., 1947.
- Бианки В.Л. Обзор: Латеральная специализация мозга животных.
- Физиол.ж.СССР, 1980, 65, II, 1593−1607.
- Гаазе-Раппопорт М. Г. Кибернетика и теория систем. В сб.:
- Системные исследования. М., Наука, 1973, 63−74.
- Гурфинкель B.C., Левин Ю. С. Сенсорные комплексы и сенсомоторная интеграция. Физиология человека. 1979, 5, 3, 552 560.
- Дезабришвили Г. А. Вегетативные корреляты поведенческой деятельности. Ж.высш.нервн.деят., 1953, 3, I, 75−84.
- Забродин И.Ю., Петров Е. С., Вартанян Г. А. Методологические аспекты формализации сложных форм поведения в физиологическом эксперименте. В сб.: Методологические проблемы обработки медико-биологической информации. Л., АМН СССР, 1983, 29−39.
- Иванников В.А. Поведение человека в ситуации выбора. В сб.:I
- Вероятностное прогнозирование в деятельности человека. М., Наука, 1977, II2-I33.
- Катков Ю.А., Калмыков В. Л. Способность обучения крыс с различной устойчивостью к стрессовым воздействиям и ее связь с уровнем биогенных аминов мозга. В сб.: Память и следовые процессы.Тез.доклЛУ Всес.конф.Пущино-на-Оке, 1979, 55−56.
- Клацки Р. Память человека, структуры и процессы. М., Мир, 1978
- Коган А.В., Чораян О. Г. Вероятностные механизмы, нервной деятельности. Ростов-на-Дону. Ростовский ун-т, 1980.23