Разработка и исследование высокоточных регуляторов электромеханических исполнительных органов систем ориентации и стабилизации космического аппарата
Результаты экспериментальных исследований подтвердили адекватность разработанных имитационных моделей. Предложенные законы управления, алгоритмы структурно-параметрического синтеза ЭП ЭМИО и имитационные модели использовались в рамках создания аппаратно-программного моделирующего комплекса прибора «Агат-15М» и при выполнении научно-исследовательских и опытно-конструкторских работ ОАО «НПЦ «Полюс… Читать ещё >
Содержание
- Аннотация
- Глава 1. Электромеханический исполнительный орган системы ориентации и стабилизации космического аппарата
- 1. 1. Определение, принцип действия и особенности ЭМИО
- 1. 2. Обзор отечественных и зарубежных ЭМИО
- 1. 3. Способы управления динамическим моментом и точностные характеристики ЭП ЭМИО
- 1. 4. Выводы
- Глава 2. Разработка имитационной модели ЭП ЭМИО
- 2. 1. Моделирование электромеханических узлов и систем
- 2. 2. Метод аналогий
- 2. 3. Имитационная модель ЭП ЭМИО
- 2. 4. Результаты моделирования
- 2. 5. Выводы
- Глава 3. Синтез высокоточного регулятора ЭП ЭМИО по условию нулевой ошибки
- 3. 1. Следящий регулятор тока с управлением по условию нулевой ошибки
- 3. 2. Управление ЭП ЭМИО с прогнозированием приращения тока в силовой цепи
- 3. 3. Регуляторы реверсивных ЭП ЭМИО
- 3. 4. Модуляторы реверсивных ЭП ЭМИО
- 3. 5. Выводы
- Глава 4. Исследование высокоточного регулятора ЭП ЭМИО
- 4. 1. Имитационная модель ЭП ЭМИО со следящим регулятором с управлением по условию нулевой ошибки
- 4. 2. Исследование имитационной модели ЭП ЭМИО со следящим регулятором с управлением по условию нулевой ошибки
- 4. 3. Исследование адекватности разработанных имитационных моделей
- 4. 4. Сравнительный анализ статических и динамических характеристик ЭП ЭМИО
- 4. 5. Выводы
Разработка и исследование высокоточных регуляторов электромеханических исполнительных органов систем ориентации и стабилизации космического аппарата (реферат, курсовая, диплом, контрольная)
Эффективность функционирования космического аппарата (КА) на орбите во многом зависит от точности и надежности работы его системы ориентации и стабилизации.
Управлением ориентацией КА называется осуществление заданного углового движения триэдра осей, жестко связанного с корпусом КА, относительно некоторой заданной системы одноименных осей, находящейся в пространстве. Начало триэдров находится в одной и той же точке корпуса КА, в которой движение вокруг центра масс не влияет на движение самого центра масс. В случае если повороты КА связаны с движением центра масс, то управление угловым положением КА называется угловой стабилизацией. Система, обеспечивающая это управление, называется системой ориентации и стабилизации К, А [89].
Управление ориентацией КА является в большинстве случаев главным режимом управления его движением. Это следует из того, что управление ориентацией, как правило, происходит непрерывно, нередко продолжаясь многие месяцы, в то время как длительность других режимов — коррекции траектории, спуска, сближения — исчисляется десятками минут или секунд. Кроме того, ни коррекция траектории полета, ни маневр спуска с орбиты, ни наведение научной аппаратуры на заданные объекты исследования, ни наведение антенн на Землю или солнечных батарей на Солнце немыслимы без управления ориентацией КА.
Развитие многочисленных функциональных областей применения электромеханических систем для КА с первых дней освоения космического пространства сопровождалось интенсивными научно-исследовательскими и опытно-конструкторскими работами как в условиях наземных испытаний отдельных электрических машин, приборов и различных систем для КА, так и особенно их отработки в космических условиях орбитального полета. Значительный вклад в решение задачи управления ориентацией КА внесли ученые К. Б. Алексеев, A.A. Анчев, Г. Г. Бебенин, M.JI. Дертозос, И. В. Новожилов, Б. В. Раушенбах, Ж. К. Робердж, В. В. Румянцев, A.B. Сорокин, E.H. Токарь, H.H. Шереметьевский.
Как известно, в 1957 году был запущен первый спутник Земли, а уже 13.04.1963 г. был осуществлен запуск космической электротехнической лаборатории «Омега» («Космос-14», «Космос-23»), созданной под руководством А. Г. Иосифьяна, на которой впервые была установлена электромеханическая система ориентации. В процессе летных испытаний спутников «Омега» подтверждена эффективность работы электромеханической системы ориентации и правильность построения ее структуры, которая в своей основе сохранилась до настоящего времени.
В США аналогичная система ориентации была впервые испытана на спутнике «Нимбус» в августе 1964 года [111].
С появлением КА, предназначенных для длительного функционирования в космическом пространстве и требующих постоянной ориентации, для осуществления высокоточной угловой стабилизации и динамичных поворотов КА относительно центра масс, широко применяются системы ориентации и стабилизации с электромеханическими исполнительными органами (ЭМИО).
На КА «Космос-14» была установлена трехосная система ориентации и стабилизации, которая позволяла ориентировать данный КА и с помощью теплового пеленгатора (построителя местной вертикали) и одновременно на Солнце при применении соответствующих датчиков. В полете был исследован режим «закрутки» всего спутника вместе с раскрытыми солнечными батареями вокруг оси, ориентированной на Солнце с помощью двигателей-маховиков. При этом солнечные батареи были жестко закреплены относительно корпуса спутника.
На КА «Космос-23» проверялись оптимальные законы управления, исследовались динамические характеристики, т. е. регистрировались и передавались на Землю по телеметрии параметры угловых поворотов в функции времени системы ориентации с ЭМИО.
Исследование этих экспериментальных закономерностей в орбитальном полете дало возможность оценить отдельные компоненты сопротивления окружающей среды при движении спутника. Было установлено, что из всех внешних возмущающих сил: аэродинамических, гравитационных, светового давления, воздействия метеорной пыли, магнитных и плазменных воздействий наибольшее значение имеют силы аэродинамические и гравитационные [7, 10, 12].
Ориентация и стабилизация КА в пространстве относительно осей базовой системы отсчета достигается за счет использования стабилизирующих свойств некоторых внешних и внутренних вращающих моментов [48]. При этом внешние моменты обусловлены взаимодействием КА с окружающей средой. К таким моментам относятся аэродинамический, гравитационный, магнитный и момент от давления солнечных лучей. Внутренние моменты возникают в результате относительного движения отдельных частей КА, таких как шторки оборудования, двигатели-маховики, солнечные батареи, истечение с борта КА газов и жидкостей и т. д. В случае нежесткого КА появляется влияние упругих составляющих колебаний частей КА относительно друг дуга, например, колебания гравитационных штанг, солнечных батарей и других нежестких выносных конструкций.
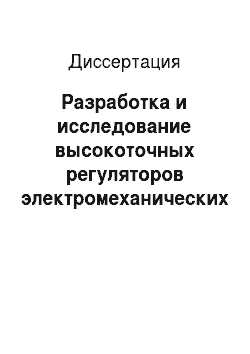
Поэтому на использовании внешних моментов основываются пассивные методы ориентации, внутренних — активные, а на совместном использовании внешних и внутренних моментов — комбинированные (рис. 1).
Рисунок 1 — Классификация систем ориентации и стабилизации.
Особенностью пассивных систем ориентации (или пассивных систем стабилизации) является их крайняя простота, отсутствие исполнительных органов для создания управляющих моментов и т. п. Однако очевидно, что пассивные системы пригодны только для поддержания некоторого режима ориентации КА, обусловленного характером используемых внешних моментов, и не могут осуществлять управления ориентацией, под которым понимается принципиальная возможность придать любое положение корпусу КА и, если надо, поддерживать положение в течение заданного времени.
Несмотря на то, что методы активной стабилизации требуют больших затрат энергии, они получили наибольшее распространение. По сравнению с пассивными методами они более эффективны при парировании внешних возмущений и более точны. Активная стабилизация КА может быть реализована либо с помощью реактивных двигателей ориентации, либо с помощью электромеханических систем. В работах К. Б. Алексеева, Г. Г. Бебенина и Б. В. Раушенбаха, E.H. Токаря [9, 89] подробно рассмотрены методы решения задачи управления ориентацией и первым и вторым способом, различные режимы процесса управления, указаны достоинства и недостатки обоих способов управления ориентацией, отмечено что, в отличие от систем, базирующихся на реактивных двигателях, использующих невосполнимые на борту запасы топлива или газа, требующих к тому же сложной системы его хранения и распределения в условиях космического полета, электромеханические системы используют электроэнергию, восполняемую солнечными батареями. Следовательно, управление осуществляется практически без затрат топлива. Это качественное отличие позволяет значительно увеличить эксплуатационный ресурс системы управления ориентацией КА. В настоящее время во всех электромеханических системах ориентации длительно существующих околоземных КА и орбитальных космических станций в качестве исполнительных органов используются силовые гироскопы и управляющие двигатели-маховики (УДМ). Это обусловлено экономией рабочего тела (топлива или газа) для микрореактивных двигателей на борту, как уже было отмечено выше, а также высокой точностью ориентации, надежностью, экологической чистотой и возможностью сохранения «прозрачной среды» вокруг объекта, необходимой для работы бортового оптического оборудования.
Управление ориентацией осуществляется с их помощью за счет перераспределения кинетического момента между исполнительным органом и корпусом КА. При этом стабилизация с помощью УДМ осуществляется изменением угловой скорости маховика, установленного по соответствующей оси КА, а изменение кинетического момента комплекса силовых гироскопов производится за счет изменения положения главных осей роторов с помощью активных моментных устройств, размещенных на осях карданова подвеса и включенных в регулирующие цепи систем ориентации.
Отличия в принципе действия УДМ и силовых гироскопов существенно не влияют на динамические характеристики системы ориентации. УДМ и силовые гироскопы имеют разные области применения.
В частности, силовые гироскопы применяют, если для управления ориентацией КА требуется реализовать большой кинетический момент и большие управляющие моменты. По этим причинам и ввиду конструктивной сложности силовые гироскопы более целесообразны для тяжелых орбитальных станций и больших космических структур [11, 110, 111].
УДМ применяются на автоматических КА (спутниках, предназначенных для исследования природных ресурсов и спутниках связи) и относительно легких орбитальных станциях. Маховичная система ориентации применена на спутниках «Омега», «Метеор», «Ресурс», «Глонасс» и других [30, 111].
Поскольку главными параметрами, определяющими эффективность работы УДМ в системах ориентации, являются развиваемый ими управляющий динамический и суммарный кинетический момент, а опыт разработки УДМ показывает, что погрешность реализации динамического момента достигает 20%, и это при учете величины момента сопротивления вращению при задании входного сигнала, то актуальной задачей является разработка высокоточных регуляторов ЭМИО системы ориентации и стабилизации КА с погрешностью реализации динамического момента менее 5% [115].
Объектом исследования является электропривод (ЭП) ЭМИО системы ориентации и стабилизации КА на базе двухфазного синхронного двигателя с постоянными магнитами.
Предметом исследования являются алгоритмы управления ЭП ЭМИО и его точностные характеристики.
Целью диссертационной работы является улучшение точностных характеристик контура формирования динамического момента ЭП ЭМИО синтезом высокоточных регуляторов.
Для достижения поставленной цели необходимо решить следующие задачи:
— провести анализ существующих алгоритмов управления ЭГ1 ЭМИО;
— создать имитационную модель ЭП ЭМИО для исследования его динамических характеристик;
— разработать алгоритмы управления ЭП ЭМИО и провести синтез высокоточных регуляторов, обеспечивающих работу ключевых элементов ЭП ЭМИО в различных режимахисследовать динамические характеристики разработанной имитационной модели ЭП ЭМИО с высокоточным регулятором.
Методы исследования базируются на теории электрических машин и электрического привода, теории дискретных систем управления, теории дифференциальных и алгебраических уравнений, вычислительных методах, современных инструментальных системах и методах математического моделирования.
Достоверность и обоснованность полученных результатов и выводов диссертационной работы подтверждается корректностью поставленных задач, обоснованностью принятых допущений, адекватностью используемой при исследовании математической модели, компьютерным моделированием, экспериментальной проверкой результатов, сравнительным анализом полученных результатов теоретического и экспериментального исследования.
Научная новизна диссертационной работы заключается в следующем:
— создана структурированная модель ЭМИО, как элемента системы ориентации и стабилизации КА, позволяющая описать его работу в реальных электрических и механических координатах и определить эффективные стратегии управления;
— разработан закон управления ЭП ЭМИО с прогнозированием пульсирующей составляющей тока силовой цепи, обеспечивающий повышение точности управления динамическим моментомпредложены структуры и алгоритмы работы регуляторов, обеспечивающих высокую точность стабилизации динамического момента ЭМИО.
Практическая ценность работы: разработан моделирующий комплекс прибора «Агат-15М», позволяющий проводить исследования динамических и статических режимов работы ЭМИО;
— проведена схемная реализация высокоточных регуляторов ЭП ЭМИО, обеспечивающих улучшенные точностные характеристики.
Реализация результатов работы. Результаты исследований и разработанные имитационные модели использовались при выполнении научно-исследовательских и опытно-конструкторских работ ОАО «НПЦ «Полюс» (г. Томск) по программе разработки ЭП на базе синхронного двигателя с постоянными магнитами, использующихся в качестве ЭМИО систем ориентации и стабилизации КА (приборов типа «Агат»), с улучшенными массогабаритными, динамическими и ресурсными характеристиками.
На защиту выносятся:
— математическая модель ЭП ЭМИО на базе синхронного двигателя с постоянными магнитами, состоящая из моделей его структурных звеньев, позволяющая описать его работу в реальных электрических и механических координатах и определить эффективные стратегии управления;
— метод синтеза высокоточного регулятора ЭП ЭМИО по условию нулевой ошибки на интервале после коммутации ключевого элемента:
— структуры и алгоритмы управления регуляторов и модуляторов, обеспечивающие повышение точности стабилизации динамического момента ЭП ЭМИО.
Основные результаты выполненного исследования заключаются в следующем:
1 Разработана имитационная модель ЭП ЭМИО на базе СДПМ, состоящая из структурных звеньев: регулятора, силовой электрической цепи, электромеханических преобразований в двигателе и механической части системы, реализованная на компонентном и частично функциональном уровне с использованием стандартных компонентов, что позволяет исследовать режимы работы любого узла ЭП ЭМИО в реальных электрических и механических координатах, при различных стратегиях управления.
2 Предложены законы управления и алгоритмы структурно-параметрического синтеза ЭП ЭМИО, основанные на прогнозировании приращения тока в силовой цепи, позволяющие создавать регуляторы, обеспечивающие высокую точность стабилизации динамического момента ЭМИО.
3 Разработаны блоки модуляции для односторонней и двухсторонней ШИМ обеспечивающие безопасное управление ключевыми элементами реверсивного ЭП в различных режимах работы.
4 Проведено исследование имитационных моделей ЭП ЭМИО с разработанным высокоточным следящим регулятором с управлением по условию нулевой ошибки, и сравнение его с ЭП ЭМИО с регулятором тока, реализующим частотно-токовый способ управления силовыми ключами инвертора. Установлено, что в ЭП ЭМИО с частотно-токовым способом управления погрешность реализации электромагнитного момента составляет 12% и присутствует перерегулирование АМ}1Л= 17%. В случае использования следящего регулятора с управлением по условию нулевой.
132 ошибки, максимальное отклонение тока в моменты коммутации от заданного опорного не превышает амплитуды пульсирующей составляющей, при этом среднее за период значение сигнала ошибки равно нулю. Разработанный регулятор позволяет формировать ток в фазах двигателя без провалов при переключении обмоток. Время переходного процесса в ЭП ЭМИО со следящим регулятором с управлением по условию нулевой ошибки в 10 раз меньше, чем в ЭП ЭМИО с регулятором тока, реализующим частотно-токовый способ. Кроме того, в разработанном регуляторе отсутствует перерегулирование, а погрешность реализации электромагнитного момента составляет 3%, что в четыре раза меньше, чем в ЭП ЭМИО с регулятором тока, реализующим частотно-токовый способ. Таким образом, поставленная задача: улучшение точностных характеристик ЭП ЭМИО, выполнена.
5 Результаты экспериментальных исследований подтвердили адекватность разработанных имитационных моделей. Предложенные законы управления, алгоритмы структурно-параметрического синтеза ЭП ЭМИО и имитационные модели использовались в рамках создания аппаратно-программного моделирующего комплекса прибора «Агат-15М» и при выполнении научно-исследовательских и опытно-конструкторских работ ОАО «НПЦ «Полюс» по программе разработки ЭМИО для систем ориентации и стабилизации КА (приборов типа «Агат»), с улучшенными массогабаритными, динамическими, точностными и ресурсными характеристиками и подтвердили эффективность работы электропривода по быстродействию и пульсациям момента в различных режимах.
ЗАКЛЮЧЕНИЕ
.
В диссертационной работе решена задача управления ЭП ЭМИО на базе СДИМ, обеспечивающая улучшение его точностных характеристик.
Список литературы
- C., Дементьев Ю. Н., Кладиев С. Н. Сравнительный анализ векторного управления и прямого управления моментом синхронного электродвигателя с постоянными магнитами // Известия ТПУ. Энергетика. 2011. Т. 319 № 4. С. 93−99.
- Абд Эль Вхаб Амр Рефки, Каракулов A.C., Дементьев Ю. Н., Кладиев С. Н. Микропроцессорная система прямого управления моментом электроприводов на базе синхронного двигателя с постоянными магнитами // Известия вузов. Электромеханика. 2011. № 6. С. 62−67.
- Аванесов В.М. Релейное управление следящими статическими преобразователями. Ч. I. Структуры систем управления: анализ и синтез // Электричество. 2000. № 10. С. 45−53.
- Адасько В.И., Иосифьян А. Г., Трифонов Ю. В., Шереметьевский H.H. Космические аппараты оперативного метеорологического и природно-ресурсного назначения. Проблемы. Технические решения. Международная интеграция. // Электротехника. 1991. № 9. С. 32−38.
- Адволокин Н.П., Гращенко В. Т., Лебедев Н. И. и др. Управляемые бесконтактные двигатели постоянного тока /. J1.: Энергоатомиздат. Ленингр. Отд-ние, 1984.
- Алексеев К. Б., Бебенин Г. Г. Управление космическим летательным аппаратом. М. Машиностроение. 1964 г. 402 с.
- Ардашов, A.A. Тенденции построения космических платформ для перспективных малых космических аппаратов./ Ардашов, A.A. и др. Изв. ВУЗОВ. Приборостроение. 2007 Т.50.№ 6. С. 55−58.
- Арефьев В.П., Сорокин A.B., Башкеев Н. И., Кондратьев O.A. Инерционные исполнительные органы систем ориентации космических аппаратов. // Гироскопия и навигация. 1995. № 2 (9). С. 7−11.
- Арайс Е.А., Дмитриев В. М. Моделирование неоднородных цепей и систем на ЭВМ. М.: Радио и связь, 1982.
- Асинхронизированный вентильный двигатель с поддержанием неизменного результирующего магнитного потока / И. П. Копылов, Ю. П. Сонин, И. В. Гуляев, Г. М. Тутаев // Электротехника. 2000. № 8. С. 59−62.
- Банковой А.П., Цацекин В. К. Прецизионный электропривод с вентильными двигателями. М.: Издательский дом МЭИ, 2010. 328 с.
- Башарин A.B., Новиков В. А., Соколовский Г. Г. Управление электроприводами. Л.: Энергоиздат. Ленингр. Отд-ние, 1982.
- Белман Р. Динамическое программирование. М.: Изд-во иностр. Лит., 1960.
- Белов Г. А. Анализ динамики импульсного стабилизатора напряжения // ЭтвА. 1983. Вып. 14. С. 88−100.
- Бродовский В.Н., Иванов Е. С. Приводы с частотно-токовым управлением /Под ред. Н. В. Бродовского. М.: Энергия, 1974.
- Брусин В.А., Угриновская Е. Я. Децентрализованное адаптивное управление с эталонной моделью // Автоматика и телемеханика. 1992. № 10. С. 29−36.
- Буков В.Н., Князев И. А. Робастное оптимальное управление // Автоматика и телемеханика. 1991. № 3. С. 15−21.
- Букреев В.Г., Параев Ю. И., Перепелкин Е. А. Применение метода модального управления для стабилизации электромеханических систем с широтно-импульсной модуляцией // Электричество. 1998. № 1.С. 48−50.
- Букреев В.Г. Стабилизация электромеханических систем с дискретным управлением // Электротехника. 1997. № 7. С. 16−19.
- Букреев В.Г. Субоптимальное управление электроприводом с широтноимпульсной модуляцией // Электротехника. 1988. № 4. С. 64−66.
- Булатов О.Г., Лабунцов В. А. Пономаренко А.И. Развитие одноканальных систем управления с вентильными преобразователями // Электричество. 1980. № 9. С. 14−21.
- Булгаков A.A. Новая теория управляемых выпрямителей. М.: Наука, 1970.
- Булгаков A.A. Частотное управление асинхронными электродвигателями. М.: Наука, 1966.
- Бут Д. А. Бесконтактные электрические машины. М.: Высш. шк., 1985.
- Верещагин В.П., Вейнберг Д. М., Стома С. А. Опыт эксплуатации силовых гироскопов-гиродинов с магнитными опорами на орбитальном комплексе «Мир» // Труды ВНИИЭМ. Электромеханические устройства космических аппаратов. М., 1997. Т.97.С. 5−12.
- Вольдек А.И. Электрические машины. Л.: Энергия, 1978.
- Герман-Галкин С. Г. Компьютерное моделирование полупроводниковых систем в MATLAB 6.0. С-Петербург. Корона принт. 2001.
- Герман-Галкин С.Г. Matlab&Simulink. Проектирование мехатронных систем на ПК. СПб.: Корона-Век, 2008.
- Государственное космическое агентство Украины. Официальный вебсайт. Спутник связи «Лыбидь-М» Электронный ресурс. Режим доступа: http://www.nkau.gov.ua/nsau/nkau.nsf.
- Дацковский Л.Х., Бирюков A.B., Вайнтруб О. Ш., и др. /Современное состояние и тенденции в асинхронном частотно-регулируемом электроприводе (краткий аналитический обзор) / / Электротехника. 1996. № 10. С. 18−28.
- Джури Э.И. Робастность дискретных систем (обзор) // Автоматика и телемеханика. 1990. № 5. С. 3−28.
- Догановский С.А. Параметрические системы автоматического регулирования. М.: Энергия, 1973.
- Домбровский В.В. Синтез оптимальных динамических регуляторов пониженного порядка для нестационарных линейных дискретныхстохастических систем // Автоматика и телемеханика. 1996. № 4. С. 79−85.
- Дортау В.А., Павлов Ю. П., Рудаков В. В. и др. /Теоретические основы построения частотных электроприводов с векторным управлением / / Автоматизированный электропривод. М.: Энергия, 1980. С. 93−101.
- Духопальников Б.А. Система импульсно-фазового управления преобразователей с интегрированием управляющего и синхронизирующего напряжений // Электротехническая промышленность. Сер. Преобразовательная техника. 1982. № 7. С. 4−5.
- Завьялова О.Ю. Способ управления динамическим моментом маховичного электропривода // XV Труды международной научно-практической конференции студентов, аспирантов и молодых ученых «Современные техника и технологии». Томск, 2009 г. С. 418−420
- Завьялова О.Ю., Казанцев Ю. М. Синтез регулятора электромеханического исполнительного органа // Известия ТПУ. Т.320, № 4, 2012 г. С. 162−166.
- Завьялова О.Ю., Казанцев Ю. М., Лекарев А. Ф. Управление с прогнозированием в вентильном электроприводе электромеханического исполнительного органа // V Юбилейная международная научно техническая конференция
- Электромеханические преобразователи энергии" имени Г. А. Сипайлова. Томск, 12−14 октября 2011 г. С. 300−304.
- Завьялова О.Ю., Казанцев Ю. М. Повышение точности управления динамическим моментом двигателя-маховика // Вопросы электромеханики. Труды НПП ВНИИЭМ. 2012 г. Т. 126, № 1. С. 39−44.
- Зенков А.К., Бутаков А. Н., Лекарев А. Ф. и др. /Синтез структуры следящего регулятора тока на имитационной модели / / Электронные и электромеханические устройства: Тез. Докл. XY науч.-техн. Конф. НПЦ «Полюс». Томск, 1997. С. 150−151.
- Зиновьев Г. С. Итоги решения некоторых проблем электромагнитной совместимости вентильных преобразователей // Электротехника. 2000. № 11. С. 12−16.
- Зиновьев Г. С. Основы преобразовательной техники. Новосибирск, 1975. Ч. 3: Методы анализа установившихся и переходных процессов в вентильных преобразователях.
- Иванов-Смоленский A.B., И. П. Копылов, Е. М. Лопухина и др. / Перспективы развития электромеханики в XXI веке // Электротехника. 2000. № 8. С. 1−4.
- Кадель В.И. Силовые электронные системы автономных объектов. Теория и практика автоматизированной динамической оптимизации. М.: Радио и связь, 1990.
- Казанцев Ю.М. Динамика управляемых преобразовательных устройств. Томск: Изд-во ТПУ, 2011. 46 с.
- Казанцев Ю.М., Лекарев А. Ф. Метод синтеза регулятора для электропривода. // Электромеханические преобразователи энергии: Материалы Международ. Науч.-техн. конф. Томск: ТПУ, 2001. С. 86−87.
- Казанцев Ю.М., Лекарев А. Ф. Разработка модели и синтез регулятора бесконтактного электропривода // Приборы и системы. Сер. Управление, контроль, диагностика. 2003. № 6. С. 22−25.
- Ключев В.И., Терехов В. М., Горнов А. О., и др. Состояние и перспективы развития теории электромеханических систем с упругими связями //Автоматизированный электропривод. М.: Энергия, 1980. С. 5−12.
- Кобелев Б.В., Машуков Е. В., Сергеев В. В. Массоэнергегические показатели силовых транзисторных ключей // ЭтвА. 1983. Вып. 14. С. 197−206.
- Козярук А.Е. Высокоэффективный бесконтактный электропривод с цифровым векторным управлением // Электротехника. 1996. № 7.1. С. 12−15.
- Константинов В.Г., Крылов B.C. Вентильные двигатели с аналоговыми и цифровыми системами регулирования, управления для электроприводов автономных объектов // Электротехника. 1996. № 5. С. 32−41.
- Копылов И.П. Электромеханические преобразователи энергии. М.: Энергия, 1973.
- Кронеберг Ю.Н., Гейнц Э. Р., Литвинов В. П. Бесконтактный двигатель с якорем на немагнитной основе // Сб. Двигатели постоянного тока с полупроводниковыми коммутаторами. М.: Наука, 1972. С. 129−135.
- Корячко В.П., Курейчик В. М., Нореков И. П. Теоретические основы САПР.: Энергоатомиздат, 1987.
- Ловчиков А.Н., Носкова Е. Е. Анализ и синтез импульсных систем // Электротехника. 1988. № 12. С. 38−42.
- Мигулин, В. В. Медведев В.И., Мустель Е. Р., Барыгин В. Н. Основы теории колебаний: Учеб. Рук-во /. М.: Наука, 1988.
- Молчанов A.A. Моделирование и проектирование сложных систем. К.: Выща шк., 1988.
- Мустафа Г. М., Ковалев Ф. И. Сравнительный анализ трех способов управления импульсными следящими инверторами // Электричество. 1989. № 2. С. 29−37.
- Новиков В.А., Рассудов Л. Н. Тенденции развития электроприводов, систем автоматизации промышленных установок и технологических комплексов // Электротехника, 1996, № 7. С. 3−11.
- Норенков И.П. Автоматизированное проектирование. М.: Изд-во
- МГТУ им. Н. Э. Баумана, 2000.
- Обрусник В.П., Лебедев Ю. М. Теория автоматического управления. Метод. Указания по выполнению курсовой работы для студентов специальности 210 106. Томск: ТУСУР, 2007.
- Овчинников И.Е., Лебедев Н. И. Бесконтактные двигатели постоянного тока. Л.: Наука, 1979.
- Овчинников И.Е. Вентильные электрические двигатели и привод на их основе (малая и средняя мощность). Курс лекций. СПб.: Корона-Век, 2006.
- Овчинников И.Е. Вентильные электрические двигатели и привод на их основе./ СПб. Корона-Век, 2007.-332с.
- Остриров В.Н., Носач С. В., Бирюков A.B., Микати Омар /Объектно-ориентированный частотно-регулируемый асинхронный электропривод на современной элементной базе / / Электротехника. 1995. № 7. С. 26−28.
- Открытое акционерное общество «Научно-производственный центр „Полюс“ Электронный ресурс. Режим доступа: http://www.polus.tomsknet.ru.
- Открытое акционерное общество „Информационные спутниковые системы“ имени академика М.Ф. Решетнёва» Электронный ресурс. -Режим доступа: http://www.iss-reshetnev.ru.
- Панкратов В.В./Вентильный электропривод: от стиральной машины до металлорежущего станка и электровоза/ //Электронные компоненты. -2007. № 2. С. 27−35.
- Пат. 2 457 610 Способ управления вращающим моментом вентильного двигателя / О. Ю. Завьялова, А. Ф. Лекарев, Ю. М. Казанцев. Опубл.:27.07.2012. Бюл. № 21.
- Петров Б.Н., Рутковский В. Ю., Земляков С. Д. Адаптивное координотно-параметрическое управление нестационарными объектами. М.: Наука, 1980.
- Петров Б.И., Полковников В. А., Рабинович JI.B. и др. Динамика следящих приводов: Учебн. Пособие для втузов /. М.: Машиностроение, 1982.
- Плеснивый А.Н./Разработка и исследование математической динамической модели электропривода управляющего двигателя-маховика. // Электронные и электромеханические системы и устройства: Сб.науч.тр. Новосибирск: Наука, 2007. С. 268−276.
- Поздеев А.Д. Динамические свойства следящих систем импульсно-фазового управления тиристорными преобразователями // Электротехника. 1979. № 9. С. 2−5.
- Поздеев А.Д., Донской Н. В. Влияние неполной управляемости вентильных преобразователей на устойчивость замкнутых систем // Электричество. 1972. № 3. С. 36−42.
- Поздеев Д.А., Хрещатая С. А. Частотное управление асинхронным электроприводом с поддержанием постоянства потокосцепления ротора // Электротехника. 2000. № 10. С. 38−41.
- Раушенбах Б.В., E.H. Токарь. Управление ориентацией космических аппаратов. Изд-во «Наука», М., 1974.
- Рудаков В.В., Дартау В. А., Россо Т. О., Козярук А. Е. /Частотно-регулируемый синхронный электропривод с векторной системой подчиненного регулирования / / Электричество. 1988. № 4. С. 53−56.
- Сазонов В.В. Принцип инвариантности в преобразовательной технике. М.: Энергоатомиздат, 1990.
- Сейдж Э.П., Уайт Ч. С. Оптимальное управление системами. М.: Радио и связь, 1982.
- Соколовский Г. Г. Электроприводы переменного тока с частотным регулированием: учебник для студ. высш. учеб. заведений. М.: Издательский центр Академия, 2006 272 с.
- Смирнов В.П., Лабунцов В. А. О способах формирования выходного напряжения автономных инверторов при использовании широтно-импульсной модуляции // Силовая полупроводниковая техника. 1968. Вып. 2. С. 36−47.
- Справочник по теории автоматического управления / Под ред. A.A. Красовского. М.: Наука, 1987.
- Спутники «Экспресс-ATI», «Экспресс-АТ2» и «Экспресс-АМ8». Портал спутниковых и телекоммуникационных технологий Электронный ресурс. Режим доступа: http://norma-press.donetsk.ua
- Стульников В.И., Колчев Е. В. Моделирование полупроводниковых преобразователей. Киев: Техника, 1971.
- Теория управления. Терминология. Вып. 107. М.: Наука, 1988. с. 56.
- Тетельбаум И.М., Шнейдер Ю. Р. Практика аналогового моделирования динамических систем: Справочное пособие. М.: Энергоатомиздат, 1987.
- Толстов Ю.Г., Мерабишвили П. Ф. Исследование установившихся и переходных процессов в вентильных преобразователях (автономных инверторах) по усредненным величинам // Электричество. 1973. № 7. С. 46−51.
- Уланов Г. М. Динамическая точность и компенсация возмущений в системах автоматического управления. М.: Машиностроение, 1971.
- Уткин В.И. Скользящие режимы в задачах оптимизации и управления. М.: Наука, 1981.
- Федеральное государственное унитарное предприятие «Научно-производственное предприятие Всероссийский научно-исследовательский институт электромеханики с заводом имени
- А.Г. Иосифьяна» Электронный ресурс. Режим доступа: http://www.vniiem.ru.
- Федеральное космическое агентство (Роскосмос) Электронный ресурс. Режим доступа: http://www.roscosmos.ru.
- Фобос-Грунт. Википедия Электронный ресурс. Режим доступа: http://ru.wikipedia.Org/w/index.php.
- Хайнеман P. PSPICE Моделирование работы электронных схем. М.: ДМК Пресс, 2002.
- Цыпкин Я.З. Релейные автоматические системы. М.: Наука, 1974.
- Чернышев А.И. Научно-техническая деятельность НПЦ «Полюс». Итоги и перспективы // Электронные и электромеханические системы и устройства: Сб. науч. трудов. НПЦ «Полюс». Томск: МГП «РАСКО» при изд-ве «Радио и связь», 2001. С. 3−16.
- Чиликин М.Г., Ключев В. И., Сандлер A.C. Теория автоматизированного электропривода. М.: Энергия, 1979.
- Шереметьевский H.H., Вейнберг Д. М., Верещагин В. П., Мирошник О. М. /Создание и эксплуатация силовых гироскопов-гиродинов с магнитными подшипниками на орбитальном комплексе «Мир» / / Электротехника. 1991. № 9. С. 38−41.
- Шереметьевский H.H. /Электромеханика и мирный космос. / Электротехника. 1987. № 6. С. 10−16.
- Шрейнер Р.Т., Ефимов A.A., Зиновьев Г. С., Корюков К. Н., Мухаматшин И. А., Калыгин А. И. /Прогнозирующее релейно-векторное управление активными преобразователями частоты в системах электропривода переменного тока / Электротехника. 2004. № 10. С. 43−50.
- Экпресс-АМ5. Википедия Электронный ресурс. Режим доступа: http://rn.wikipedia.Org/w/index.php.
- Юньков М.Г., Ильинский Н. Ф. Перспективы развития автоматизированного электропривода // Электротехника. 1980. № 5.1. С. 1−5.
- Якимовский Д.О. /Повышение точности управления моментом двигателя-маховика / /Гироскопия и навигации. 2008. — № 3 (62). С.46−52.
- Aerospace Electronic Systems. Defense & Space Electronic Systems Honeywell. Электронный ресурс. Режим доступа: http://www.honeywell.com/dscs/space.
- Honeywell corp. Электронный ресурс. Режим доступа: http://www51.honeywell.coin/aero/common/documents/Constellation Serie s Reaction Wheels. pdf, http://www51 .honeywcll.com/aero/comnion/docum ents/myaerospacecatalog-documents/HR0610 ReactionWheel. pdf
- Ithaco Space systems Inc. Электронный ресурс. Режим доступа: http://www-eng.lbl.gov/4aiever/SNAP/Snap13/ReactionWheel.pdf
- Kavamura A., Hoft R. Analysis of PWM inverter with feedback control // Int. Power Electronics Conference. Inst, of Electrical Eng. of Japan, 1983. P. 64−71.
- Kavamura A., Hoft R. Instanteneous feedback controlled PWM inverter with adaptive hysteresis // IEEE. Trans, on Ind. Appl. 1984. Vol. 1A-20. № 4. P. 17−25.
- NASA Goddard Space Flight Center. Электронный ресурс. Режим flocTyna: http://www.iafe.uba.ar/astronomia/extrag/ iafetransf/pdf/ReactionMomentum-Wheel.pdf, http://ntrs.nasa.g0v/archive/nasa/casi.ntrs.nasa.g0v/l 9 810 020 994 19 810 209 94. pdf
- Pillay P., Krishnan R. Modelling, simulation, and analysis of permanentmagnet motor drives. I. The permanent-magnet synchronous motor drive//IEEE Trans. Industry Applications.- 1989.-V.25-№ 3. P.265−273.
- Pillay P., Krishnan R. Modelling, simulation, and analysis of permanentmagnet motor drives. II. The brushless DC motor drive//lEEE Trans. Industry Applications.- 1989.-V.25-№ 2 P. 274−279.
- Space sciencesN corp. Электронный ресурс. Режим доступа: https://wiki.ui-nn.edu/pub/FormationFlying/AttitudeDeterm/Rcaction^Wheels R03 92 005.pdf
- Yim-Shu Lee David K.W. Cheng and S.C. Wong. A new approach to the modeling of converters for SPICE simulation // IEEE Trans, on Power Electronics. 1992. Vol.7. № 4. P. 741−753.
- АКТЫ О ВНЕДРЕНИИ РЕЗУЛЬТАТОВ ДИССЕРТАЦИОННОЙ РАБОТЫ
- Pe’ivibuuw исиькании и внедрения рачраооиниыч ч^ронет подгвержлаюг адекватность неполь ¡-ованиых* мо юле и и положении еформ>лированных в диссертации, правильность нрньяiыч схемотехнических решений