Математическое моделирование и анализ радиолокационных портретов распределенных объектов, формируемых радиолокационной станцией с синтезированной апертурой
ДхДу где Ах и Ау — размеры участка поверхности. Понятие дифференциальной ЭПО применима только для описания сигнала, формируемого большим числом независимых элементарных рассеивателей, что справедливо для подстилающей поверхности, но не соответствует действительности для искусственных объектов, имеющих регулярную структуру поверхности. В работах Е. А. Штагера теоретически и экспериментально… Читать ещё >
Содержание
- Список сокращений
1 Анализ подходов к математическому моделированию радиолокационных портретов распределенных наземных (надводных) объектов, формируемых РСА.
1.1 Анализ методов математического моделирования радиолокационных изображений, распределенных целей. Структура математической модели.
1.2 Методы и алгоритмы расчета на ЭВМ формы поверхности распределенных искусственных объектов.
1.3 Методы решения задач дифракции электромагнитных волн на поверхностях распределенных объектов сложной формы.
1.3.1 Методы решения стационарных задач дифракции электромагнитных волн.
1.3.2 Методы физической оптики и эквивалентных токов -элементарных краевых волн в решении задачи рассеяния.
Выводы по разделу 1.
2 Учет искажающих и дестабилизирующих факторов при математическом моделировании тракта формирования и обработки радиолокационных сигналов.
2.1 Математическое моделирование процессов формирования и обработки радиолокационных сигналов.
2.2 Математическая модель тракта формирования радиолокационного портрета при траекторных нестабильностях носителя.
2.3 Математическое моделирование радиолокационных изображений движущихся надводных распределенных объектов и объектов с движущимися элементами.
2.3.1 Математическая модель движения распределенных морских объектов. Общая задача гидродинамической теории качки.
2.3.2 Статистические характеристики нерегулярной качки судов.
2.3.3 Параметры статистических характеристик качки морских судов.
2.4 Аналитический подход к определению искажений, вносимых в радиолокационный портрет движением наблюдаемого объекта и траекторными флуктуациями носителя.
2.5 Математическое моделирование радиолокационного портрета с учетом шумов аппаратуры, помех и нелинейности тракта приема и обработки радиолокационного сигнала.
Выводы по разделу 2.
3 Разработка алгоритмов и программная реализация математической модели РЛП распределенных объектов на ЭВМ.
3.1 Разработка цифровой модели процесса формирования РЛП распределенных целей.
3.2 Оценка достоверности разработанной математической модели.
3.3 Оценка временных характеристик и требований к вычислительной системе для реализации математической модели в реальном и близком к реальному масштабе времени.
Выводы по разделу 3.
4 Применение разработанной модели к анализу искажений радиолокационных портретов распределенных объектов.
4.1 Разработка аппарата анализа и оценки искажений РЛП.
4.2 Анализ искажений радиолокационных изображений, вызванных траекторными нестабильностями носителя PC А.
4.3 Анализ искажений радиолокационных изображений, вызванных движением наблюдаемых объектов.
4.4 Анализ искажений радиолокационных изображений, вызванных нелинейностью тракта формирования и обработки радиолокационного сигнала.
Выводы по разделу 4.
Математическое моделирование и анализ радиолокационных портретов распределенных объектов, формируемых радиолокационной станцией с синтезированной апертурой (реферат, курсовая, диплом, контрольная)
Последнее десятилетие характеризуется интенсивным развитием и совершенствованием, а также расширением области применения авиационных и космических радиолокационных станций (РЛС) наблюдения земной (морской) поверхности и объектов с использованием принципа синтезированной апертуры (РСА) как в военных целях, так и в гражданских отраслях: картографии, исследовании природных ресурсов, решении задач научно-технического и прикладного характера и т. п. Это обусловлено рядом значительных преимуществ РСА по сравнению с системами наблюдения оптического диапазона (аэрофотографическими и оптико-электронными). Современные РСА обеспечивают оперативный сбор достаточно полной и достоверной информации с обширных территорий земной поверхности и объектах независимо от времени суток и метеорологических условий на больших дальностях от траектории носителя с разрешающей способностью (до единиц и долей метра) практически сравнимой, а на больших дальностях и превышающей разрешение аэрофотографических и оптико-электронных систем зондирования земной поверхности. В силу высокой проникающей способности электромагнитных волн (ЭМВ) радиодиапазона (через растительные покровы Земли, снег, лед, рыхлые почвы и др.) и возможности использования данных о земной поверхности и объектов, заключенных не только в амплитудах, но и в доплеровском смещении частоты, поляризации и фазе рассеянных земной (морской) поверхностью и объектами электромагнитных волн, данные радиолокационного наблюдения являются более информативными, чем изображения получаемые в оптическом диапазоне.
При достижении в настоящее время разрешающей способности РСА многие искусственные объекты на радиолокационном изображении (РЛИ) перешли в разряд распределенных с передачей особенностей их формы, размеров, структуры поверхностей. Однако, если визуальные характеристики РЛИ земной (морской) поверхности и большинства топографических объектов с повышением разрешающей способности (до долей метра) приближаются к подобным характеристикам оптических изображений, то визуальные особенности искусственных объектов (различная наземная техника, морские суда и т. д.) даже при разрешении выше оптических изображений, обуславливают значительные трудности при обнаружении и распознавании этих объектов по РЛИ, что требует больших усилий и затрат на обучение и тренаж дешифровщиков РЛИ. Эффективность этих процессов сильно зависит от объема и качества базы данных РЛИ искусственных распределенных объектов, получаемых для различных условий наблюдения и характеристик РСА. Получение и обслуживание таких баз данных с использованием реальных РЛИ затруднено.
В связи с этим возникла задача математического моделирования радиолокационных портретов (РЛП) искусственных распределенных объектов, решение которой позволит формировать достаточно достоверные РЛИ искусственных объектов для различных условий наблюдения и характеристик РСА. Под термином радиолокационный портрет распределенного объекта будем понимать оценку рассеянного искусственным объектом электромагнитного поля у его поверхности по данным регистрации поля в приемной апертуре РСА.
Задача моделирования РЛП имеет двойственную природу. С одной стороны, она относится к одной из важнейших проблем радиолокации — к задаче описания радиолокационных характеристик (РЛХ) наблюдаемых объектов, поэтому для ее решения требуется исследование дифракции ЭМВ на телах сложной формы с использованием современных методов вычислительной электродинамики. С другой стороны, на практике РЛП формируется реальной радиотехнической системой (РСА) путем оценивания поля вблизи поверхности по результатам его измерения в приемной апертуре РСА. Поэтому модель РЛП должна адекватно воспроизводить особенности этого процесса.
Развитие методов моделирования РЛП распределенных объектов долгое время сдерживалось их сложностью и разнородностьютак как в рамках модели должны быть объединены методы вычислительной геометрии, вычислительной электродинамики и статистической радиотехники. Однако прогресс в вычислительных методах электродинамики и вычислительной техники позволили решить эту задачу благодаря исследованиям многих отечественных и зарубежных специалистов.
Первой применяемой на практике в радиолокации РЛХ объекта стала его эффективная поверхность отражения (ЭПО), на вычисление которой ориентированы многие методы теории дифракции ЭМВ [1.30]: ст = Ая lim Я.
Л-юо.
1).
Е1 где R — расстояние до объекта, и Ef — падающее и рассеянное электромагнитное поле. ЭПО характеризует распределение амплитуды рассеянного поля в дальней зоне и является интегральной характеристикой рассеяния объекта. Для задач, в которых важна фаза рассеянного поля, Е. Ноттом [1.48] было введено понятие когерентного ЭПО:
Es 'eR yfa = 2у[ж lim R-^—ехр (-г^), (2).
РkMS Г? ' где к = 2ж/Х — волновое числоX — длина волныeR — орт направления поляризации приемной антенны. На этом этапе развития для математического описания процесса формирования радиолокационного изображения объектов, размеры которых были значительно меньше размеров элемента разрешения PJTC, используется модель «точечной» цели, при этом цель характеризуется единственным параметром — эффективной поверхностью отражения.
Для расчета ЭПО обычно используют ряд допущений: рассматривают дифракцию монохроматической волны, пренебрегают влиянием соседних тел, полагают пространство безграничным и заполненным однородной изотропной средой, считают металлические объекты идеально проводящими [1.10]. Кроме того в большинстве практических задач длина волны много меньше размеров объекта, что позволяет использовать высокочастотные асимптотические представления рассеянного поля. В 40−50 е годы были предложены метод физической оптики и основанный на лучевом разложении поля метод геометрической теории дифракции (ГТД) Дж. Б. Келлера [2.54]. Позже П. Я. Уфимцевым на основе решения Зоммерфельда задачи дифракции на идеально проводящем клине был предложен метод краевых волн [1.39]. ГТД получила свое развитие в виде предложенной Р. Куюмджаном и П. Патхаком равномерной теории дифракции [2.19], а метод краевых волн был уточнен в последующих работах П. Я. Уфимцева [2.33- 2.78] и работах А. Михаэли [2.67 -2.69], в которых он назван методом эквивалентных токов — элементарных краевых волн (ЭТ-ЭКВ). В настоящее время метод ЭТ-ЭКВ обеспечивает точность расчетов не менее первых двух членов асимптотического разложения точного решения [2.78], что в большинстве практических случаев превосходит точностные характеристики экспериментальных методов определения ЭПО сложных тел.
Наряду с асимптотическими методами в теории дифракции получили широкое развитие строгие методы, в частности, метод интегральных уравнений, который позволяет подойти с единых позиций к анализу дифракции радиоволн на поверхности произвольной формы. Граничные задачи электродинамики могут быть сведены к интегральным уравнениям различного типа и размерности. Наибольшие успехи были достигнуты при решении задач дифракции на идеально проводящих телах, обладающих симметрией. Е. Н. Васильевым [1.5] были исследованы интегральные уравнения, возникающие при решении задачи дифракции на поверхностях вращения. Для широкого класса задач дифракции на незамкнутых экранах Е. В. Захаровым и t.
Ю. В. Пименовым [1.10] был разработан эффективный метод решения, основанный на сведении задачи к одномерному интегральному уравнению первого рода. В последнее время все чаще применяется сведение граничных задач электродинамики к сингулярным и гиперсингулярным интегральным уравнениям, для численного решения которых используется разработанный И. К. Лифановым [1.17] метод дискретных особенностей. Метод интегральных уравнений в задачах дифракции породил множество как строгих, так и приближенных методов. А. Ю. Анфиногеновым получено численное решение задачи дифракции Н — поляризованной волны на цилиндрической поверхности, соответствующая решению задачи Неймана для уравнения Гельмгольца, которое сведено к гиперсингулярному интегральному уравнению [3.1]. А. С. Ненашевым в работе [3.2] на основе метода дискретных особенностей получено решение уравнений Поклингтона для тонкой проволочной антенны.
Однако, по мере развития радиолокационной техники, увеличении разрешающей способности и снижении аппаратурной погрешности РСА возникла необходимость описания РЛХ сложных распределенных объектов. Для описания мощности отраженного подстилающей поверхностью сигнала еще в 50-е годы было введено понятие удельной, или дифференциальной, ЭПО [1.30]:
I s I2 стх, у) = -, (3).
3 |? | ДхДу где Ах и Ау — размеры участка поверхности. Понятие дифференциальной ЭПО применима только для описания сигнала, формируемого большим числом независимых элементарных рассеивателей, что справедливо для подстилающей поверхности, но не соответствует действительности для искусственных объектов, имеющих регулярную структуру поверхности. В работах Е. А. Штагера [1.44- 1.45] теоретически и экспериментально подтверждена появившаяся еще в 60-е годы концепция локальных центров рассеяния (ЛЦР), согласно которой отраженное от объекта поле в сантиметровом и дециметровом диапазоне формируется небольшим числом источников, локализованных на освещенной части его поверхности, причем расстояние между ними велико по сравнению с длиной волны, а занимаемая ими площадь мала относительно всей освещенной части поверхности объекта. Вклад трех-пяти наиболее сильных локальных источников обеспечивает более 90% энергии отраженного сигнала (а следовательно, и ЭПО объекта). Метод ЛЦР широко применяется для описания PJIX сложных объектов [1.29]. С использованием этой модели рассеяния в работе [1.27] Ю. А. Феоктистовым произведен структурный синтез РЛС обзора Земли. Для определения статистических РЛХ сложных и распределенных объектов также широко применяется метод ЛЦР [1.21]. Модель отраженного радиолокационного сигнала на основе метода ЛЦР удобна при исследовании его статистических характеристик и при решении задач структурного синтеза РСА, а также для моделирования РЛХ сосредоточенных объектов и фона, однако для РЛИ сложных объектов с высоким разрешением эта модель является слишком грубой, поскольку практически не передает информацию о форме и текстурных признаках объекта.
Более точное представление на формируемых с помощью РСА радиолокационных изображениях искусственных распределенных объектов может быть получено с использованием локальных РЛХ объекта. Для этого было введено и широко используется понятие — функции радиолокационного рельефа (ФРР) или функция отражения объекта. Определение ФРР как составляющей электромагнитной волны, отраженной в сторону РСА элементарным участком поверхности, используемое в работах В. Г. Позднякова и Л. А. Школьного, предполагало непрерывную функцию радиолокационного рельефа, не сводящуюся к совокупности ЛЦР. Это позволило провести анализ и синтез систем обработки сигнала при формировании радиолокационного изображения по критериям, связанным с наилучшим оцениванием непрерывной ФРР. Тем не менее, в этих работах не было предложено строго определения ФРР и способов ее практического вычисления для искусственных распределенных объектов.
Как показывает анализ до 70% объектов наблюдения являются движущимися или с движущимися элементами конструкции. Движение объектов носит сложный характер, как правило, в нем можно выделить поступательное движение (определяемое движителем), колебательные и колебательно — вращательные движения, связанные с окружающей средой (неровности дорог для автотранспорта, волнение морской поверхности для морских судов и т. д.). Кроме того, носитель РСА подвержен флуктуациям в силу турбулентности атмосферы, аэроупругих колебаний конструкции, неточностью пилотирования и т. д. Следует учитывать также, что РЛС функционирует в сложной электромагнитной обстановки (преднамеренных и непреднамеренных помех) и РСА, как сложной технической системе, присущи характеристики функционирования (шумы аппаратуры, нелинейность трактов). Поэтому математическая модель должна адекватно воспроизводить данные особенности на формируемых радиолокационных изображениях. Как показано в работе все выше перечисленные факторы влияют на качество РЛИ.
В настоящее время сложилось два подхода к описанию функционирования и соответственно синтезу систем обработки РСА — это томографический и фильтровой. Томографический подход к формированию РЛП представляется последовательным описанием всех этапов формирования зондирующего сигнала, его распространения в пространстве, приема и обработки отраженного сигнала и постановкой в соответствие этим преобразованием некоторых операторов. Впервые такой подход был описан в работах Д. Менсы [2.22] и Н. Фархата [2.44- 2.61].
Другим подходом к формированию РЛП является математическая модель РСА на основе представления процесса формирования РЛП совокупностью детерминированных и стохастических операторов пространственно-временного преобразования функции радиолокационного рельефа. Основной особенностью фильтрового подхода к моделированию РЛП является то, что РСА (или обычная РЛС с высоким разрешением, или когерентная оптическая система и т. п.) представляется в виде некоторого оператора (в общем случае нелинейного), который отображает множество ФРР на множество РЛП. При этом операторы, описывающие работу РСА, можно исследовать отдельно и в достаточной степени независимо друг от друга. Впервые такой подход предложен в работах В. Г. Позднякова и JL А. Школьного, среди зарубежных работ стоит отметить работы М. Уоллерса [2.79] и Дж. Францесцетти [2.46- 2.47]. В рамках данной работы математическое моделирование радиолокационных изображений распределенных объектов будем производить в соответствии с фильтровым подходом.
Среди работ посвященных математическому моделированию РЛП распределенных искусственных объектов, стоит отметить работу А. Ю. Анфиногенова [3.1], где большое внимание уделено решению задач дифракции ЭМВ на поверхности сложной формы, предложено численное решение задачи рассеяния Н — поляризованной волны на цилиндрической поверхности, исследованы границы применимости асимптотических методов дифракции ЭМВ. Однако предложенная в работе модель РЛП не отображает процесса формирования и обработки радиолокационного сигнала, что сужает ее область применения до моделирования РЛИ в эталонных условиях и не позволяет использовать в широком круге задач таких, как исследование информационных возможностей РСА, анализ влияния искажающих и дестабилизирующих факторов (флуктуаций носителя РСА, движения наблюдаемого объекта, шумов, помех) и т. д.
Цель данной диссертационной работы состоит в разработке и программной реализации на ЭВМ математической модели радиолокационных портретов распределенных объектов сложной формы, с учетом условий наблюдения, характеристик аппаратуры наблюдения, траектории движения носителя РСА, произвольного движения наблюдаемых объектов, шумов аппаратуры и помех. В общем случае проблема математического моделирования РЛП естественным образом разбивается на шесть тесно связанные между собой задач: моделирование формы и электромагнитных свойств наблюдаемого объекта, решение задачи радиолокационного рассеяния на объекте, моделирование движения объекта, моделирование траекторных нестабильностей носителя РСА, моделирование тракта формирования радиолокационного сигнала и математическое моделирование тракта обработки радиолокационного сигнала в РСА.
Научная новизна работы заключается в следующем:
1. Разработана математическая модель процесса формирования РЛП распределенных объектов, с учетом условий наблюдения, характеристик и параметров аппаратуры наблюдения, траектории движения носителя РСА, произвольного движения наблюдаемых объектов, шумов аппаратуры и помех.
2. Предложен статистический подход к описанию движения надводного объекта по возмущенной водной поверхности в интересах моделирования РЛИ.
3. Разработана математическая модель и проведен анализ искажений, вносимых в РЛП движением наблюдаемого объекта.
4. Разработан эффективный алгоритм численного решения задачи электромагнитного рассеяния на идеально проводящих телах сложной формы в высокочастотном приближении, основанный на методах ФО и ЭТ-ЭКВ, использующий особенности процесса формирования РЛП для сокращения вычислительных затрат.
Практическая ценность разработанной математической модели РЛП определяется тем, что экспериментальное получение РЛИ распределенных объектов возможно лишь в процессе облета наземных (морских) объектов с использованием существующих образцов РСА, что связано с большими затратами и может быть выполнено в небольшом диапазоне вариации условий наблюдения, параметров и характеристик этих РСА в отличие от моделирования РЛП, при котором возможно изменение характеристик РСА и условий радиолокационного наблюдения в широких пределах. Для практической реализации модели на ЭВМ разработан программный комплекс моделирования РЛП общим объемом более 11 000 строк на языке программирования С++ с использованием интегрированной среды разработки Builder С++, функционирующий под операционными системами MS Windows 98/NT4/2000/XP. Среди множества практически важных направлений применения разработанной модели РЛП можно выделить следующие:
— Тренаж операторов-дешифровщиков по распознаванию наземных и морских объектов с использованием РЛП эталонных объектов.
В силу значительных отличий РЛИ объектов, получаемых в оптическом диапазоне ЭМВ, у операторов-дешифровщиков традиционно занимающихся дешифрированием этих изображений возникают сложности при обнаружении и распознавании объектов по РЛИ, из-за отсутствия опыта интерпретации детальных РЛИ. Поэтому использование при тренировке операторов-дешифровщиков моделей РЛП известных объектов может существенно повысить эффективность их обучения, по дешифрированию РЛИ.
— Исследование информационных возможностей РСА.
Моделирование РЛП позволит исследовать информативность РСА при их проектировании на этапе отработки тактико-технических характеристик, корректировать технические требования в процессе разработки РСА, а также оптимально применять находящиеся в эксплуатации РСА для распознавания объектов по РЛИ. На основе моделирования могут быть разработаны практические рекомендации по изменению параметров и характеристик РСА в целях повышения информативности РЛП при визуальном, автоматизированном и автоматическом распознавании искусственных объектов.
— Обеспечение алгоритмов автоматического и автоматизированного обнаружения и распознавания объектов по их РЛИ.
Для реализации этих алгоритмов требуется иметь большой объем априорных данных по РЛП эталонных объектов рассматриваемого алфавита классов. Эти данные можно получить или путем предварительного расчета РЛП с использованием математической модели, либо уметь моделировать РЛП объектов в реальном или близком к реальному масштабу времени. Моделирование РЛП позволяет проводить оценку эффективности и отладку алгоритмов автоматизированной и автоматической обработки радиолокационной информации, предсказывать характерные признаки РЛП конкретных объектов в зависимости от его формы, состояния поверхности и параметров РСА. В человеко-машинных методах обработки РЛИ моделирование РЛП должно обеспечить оператору-дешифровщику задачу интерпретации радиолокационных изображений, как известных объектов, так и объектов, экспериментальное получение РЛП которых недоступно. Моделирование позволяет исследовать устойчивость достаточных статистик, применяемых в алгоритмах автоматического и автоматизированного распознавания объектов по их РЛИ. Информационное обеспечение алгоритмов обработки радиолокационных сигналов.
Как показано в работе на качество РЛП влияет множество факторов (траекторные флуктуации носителя РСА, сложное движение наблюдаемого объекта и т. д.) приводящих к ухудшению качества радиолокационного изображения. Следовательно, возникает необходимость разработки алгоритмов компенсации влияния дестабилизирующих и искажающих факторов на РЛИ. Синтез таких алгоритмов может быть произведен на основе экспериментальных данных и (или) по результатам моделирования с использованием разрабатываемой математической модели. Кроме того, апробации разрабатываемых алгоритмов и оценка их эффективности может быть произведена на основе данных математического моделирования.
— Исследование радиолокационной заметности искусственных распределенных объектов.
Моделирование РЛП объектов в работах по исследованию радиолокационной заметности может проводиться по двум направлениям. Во-первых, это получение РЛИ объектов, разработанных с учетом требований по снижению радиолокационной заметности (технологии «Стеле»). Полученная при этом информация может быть использована для реализации алгоритмов обнаружения и распознавания объектов этого класса. Во-вторых, моделирование РЛП позволит изучать влияние геометрических особенностей поверхности объектов на их радиолокационные характеристики, что может использоваться для минимизации радиолокационной заметности существующих и перспективных образцов техники.
Апробации работы и публикации.
1. Научно-исследовательские семинары кафедры математической физики факультета ВМиК МГУ (руководители профессор Захаров Е. В., профессор Лифанов И. К.).
2. X Международный симпозиум «Метод дискретных особенностей в задачах математической физики МДОЗМФ-2003» (г. Херсон, 29 мая — 5 июня 2003 г.).
3. Научные чтения по авиации посвященные памяти Н. Е. Жуковского, г. Москва, 2004 г.
4. XXIII Всероссийский симпозиум «Радиолокационное исследование природных сред», (г. Санкт-Петербург, 19−21 апреля 2005 г.). Результаты работы опубликованы в 6 печатных трудах [2.5- 2.8- 2.302.32- 2.39].
Рассмотрим структуру и краткое содержание работы, состоящей из введения, четырех разделов, заключения и списка литературы, содержащего 135 наименования.
В разделе 1 работы формулируется задача математического моделирования радиолокационных портретов распределенных объектов сложной формы, которая заключается в определении функции радиолокационного рельефа независимо от используемого метода решения задачи дифракциив определении оператора, преобразования ФРР в радиолокационный сигнал, с учетом искажающих и дестабилизирующих факторовв определении оператора обработки радиолокационного сигналав алгоритмической и программной реализации моделив проверке достоверности моделив оценке влияния искажающих и дестабилизирующих факторов на РЛП. При разработке модели были приняты следующие допущения:
1) идеально проводящий объект наблюдается на фоне свободного пространства;
2) среда распространения ЭМВ является линейной, изотропной и однородной;
3) РСА использует узкополосный зондирующий импульс, для которого ширина спектра много меньше несущей частоты А/ «f0;
4) интервал синтезирования много меньше дальности до центра зоны наблюдения Хс «R^.
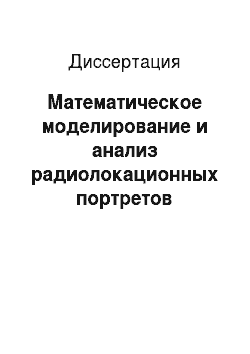
Структура математической модели РЛП может быть представлена в виде схемы на рисунке 1.
Кроме того, осуществляется выбор эффективных методов моделирования и задания поверхности объекта сложной формы. Для этого используется набор кусочно-гладких параметрически заданных поверхностей. Дискретизация параметрического уравнения поверхности на некоторой сетке позволяет перейти к фацетной модели поверхности объекта, основным элементом которой является треугольная площадка-фацет.
Рисунок 1 — Структура математической модели формирования РЛП.
Моделирование РЛП требует решения задачи дифракции в высокочастотном диапазоне при длине волн, существенно меньшей размера объекта с приемлемой для практических нужд точностью и с допустимыми для современных ЭВМ вычислительными затратами. В работе проведен анализ существующих методов вычислительной электродинамики и обоснован выбор для решения этой задачи метода физической оптики (ФО) и метода эквивалентных токов — элементарных краевых волн (ЭТ-ЭКВ) Михаэли — Уфимцева [2.67- 2.78], относящихся к категории асимптотических методов и являющимися дальнейшим развитием физической теории дифракции П. Я. Уфимцева [1.39]. Выбор методов ФО и ЭТ-ЭКВ обусловлен их простотой, алгоритмичностью, высоким быстродействием и приемлемой точностью.
Раздел 2 посвящен математическому моделированию тракта формирования и обработке радиолокационного сигнала. Определены общие выражения, описывающие процесс формирования радиолокационного портрета. На основе статистического описания флуктуаций носителя РСА построена математическая модель тракта формирования и обработки радиолокационного сигнала, учитывающая флуктуации фазы отраженного сигнала.
Кроме того, получена модель тракта формирования РЛП с учетом сложного движения наблюдаемого объекта. В качестве объектов наблюдения рассматривались морские суда, имеющие шесть степеней свобода, что определяет колебания вдоль строительных осей и возможное появление вращательных моментов относительно этих осей. В общем случае движение морского судна можно свести к следующим составляющим:
1) движение центра масс (ЦМ) объекта (поступательное движение, вертикальная, продольно-горизонтальная и поперечно-горизонтальная качки — поступательно-колебательные движения вдоль соответствующих осей);
2) изменение положения объекта вызванные:
— бортовой качкой — вращательно-колебательным движением в поперечной плоскости корабля;
— килевой качкой — вращательно-колебательным движением в продольной плоскости;
— рысканьем — движением корабля в горизонтальной плоскости.
На основании рассмотрения общей задачи теории качки, с нелинейными и нестационарными граничными условиями, используя линеаризацию граничных условий приведены дифференциальные уравнения, описывающие качку судов на морском волнении. Однако в большинстве случаев, при наблюдении с помощью РСА движущихся по морской поверхности объектов, нельзя точно знать все характеристики и параметры объекта, а в частности, такие как загрузка корабля (его масса на момент наблюдения), центровка груза и т. д. В связи, с чем был осуществлен переход к статистическому описанию качки.
Также рассмотрено влияние движения на качество РЛП и аналитически получены выражения для РЛИ при сложном движении наблюдаемого объекта. Предложенное решение обладает универсальностью в отношении траектории движения наблюдаемого объекта, а так же позволяет получить (понять) структуру формируемого РСА радиолокационного изображения от движущихся распределенных целей.
В заключение раздела математическая модель РЛП дополнена моделью учитывающей шумы аппаратуры и помехи, а также нелинейность тракта приема и обработки радиолокационного сигнала. Установлено, что система цифровой обработки, в силу нелинейности, обуславливает эффект подавления слабых сигналов сильными. За счет этого эффекта на РЛИ не отображаются слабоотражающие участки поверхности объекта, что приводит к дроблению отметок пространственно-распределенных объектов и снижает эффективность их визуального обнаружения и распознавания на РЛИ.
Раздел 3 посвящен построению эффективного алгоритма решения задачи дифракции на поверхности, а также оценки достоверности разработанной математической модели и оценки временных затрат.
В разделе разработан эффективный алгоритм численного решения задачи электромагнитного рассеяния на идеально проводящих телах сложной формы в высокочастотном приближении, основанный на методах ФО и ЭТ-ЭКВ, использующий особенности процесса формирования РЛП для сокращения вычислительных затрат. Применение полученных результатов для математического моделирования позволяет сократить объем вычислений и находить решение по характерным точкам, соответствующим вершинам элементов аппроксимации поверхности объекта. На основании полученных выражений с привлечение ускорителей трехмерной графики можно осуществить моделирование эталонных РЛИ в реальном масштабе времени.
Проведенное сопоставление данных результатов моделирования и реальных данных показывает достаточно высокое сходство, что подтверждает работоспособность модели и говорит о достоверности результатов моделирования РЛИ.
Раздел 4 посвящен исследованию влияния дестабилизирующих и искажающих факторов на качество РЛП. Было рассмотрено влияние на два объекта: эсминец ВМС США «Кидд» и авианесущий крейсер «Адмирал Кузнецов». При этом установлены следующие факты. Характерной особенностью радиолокационных изображений при наличии качки корабля на морском волнении является то, что разрешающая способность не остается постоянной величиной для всего объекта и центр объекта всегда наблюдается несмещенным относительного своего истинного положения. При наличии флуктуаций носителя РСА можно выделить три участка характеризующих качество РЛИ: первый при отношении разрешение < 8 м., геометрические изменения размеров объекта малы, при этом максимум взаимной корреляционной функции (ВКФ) эталонного РЛИ и в условиях флуктуации составляет 0.55−0.98- второй при разрешение 8−13 м., когда геометрические изменения размеров составляют порядка 10−15%, максимум ВКФ близок к единице (0.98−0.99) — третий участок соответствует разрешение > 13 м., когда объект начинает переходить из разряда распределенных целей в сосредоточенные объекты, при этом наблюдается уменьшение геометрических изменения размеров, но увеличивается смещение положения всего объекта на радиолокационном изображении.
Выводы по разделу 4.
1. При наличии флуктуаций носителя РСА можно выделить три участка характеризующих качество РЛИ: первый при отношении тк/Тс< 2.5 (разрешение < 8 м.), геометрические изменения размеров объекта, А составляют порядка 5%, при этом максимум ВКФ составляет 0.55−0.98- второй при 2.5<�тк/Тс<4 (разрешение 8−13 м.), когда геометрические изменения размеров составляют порядка 10−15%, максимум ВКФ близок к единице (0.98−0.99) — третий участок соответствует тк/Тс>4 (разрешение >13 м.), когда объект начинает переходить из разряда распределенных целей в сосредоточенные объекты, при этом наблюдается уменьшение геометрических изменения размеров А, но увеличивается смещение положения всего объекта на радиолокационном изображении.
2. Для улучшения разрешающей способности, а соответственно увеличении интервала синтезирования, необходимо принимать специальные меры по улучшению качества РЛИ (использовать алгоритмы компенсации траекторных флуктуаций и алгоритмы адаптивной обработки радиолокационных сигналов). Применение алгоритмов компенсации траекторных нестабильностей носителя РСА позволяют снизить уровень геометрических искажений в 6−7 раз.
3. Наибольшее влияние на качество РЛИ оказывает килевая качка, это может быть объяснено тем, что временной интервал корреляции килевой качки меньше интервала корреляции бортовой. Кроме того, с увеличением требуемого разрешения увеличивается влияние качки на РЛИ, что определяется уменьшением отношения интервала корреляции качки к временному интервалу синтезирования.
4. Характерной особенностью радиолокационных изображений при наличии качки корабля на морском волнении является то, что разрешающая способность не остается постоянной величиной для всего объекта и центр объекта всегда наблюдается несмещенным относительного своего истинного положения.
5. При движении наблюдаемого объекта относительно своего центра масс (качка корабля) необходимо разрабатывать и применять специальные алгоритмы. Одним из путей является построение адаптивных алгоритмов на основе инверсного синтезирования радиолокационного изображения.
6. В алгоритмах автоматического распознавания целей необходимо формировать радиолокационное изображения с числом уровней квантования L> 16.
ЗАКЛЮЧЕНИЕ
.
В ходе выполнения исследований целью которых была разработка и программная реализации на ЭВМ математической модели радиолокационных портретов распределенных объектов сложной формы, с учетом условий наблюдения, характеристик и параметров аппаратуры наблюдения, траектории движения носителя РСА, произвольного движения наблюдаемых объектов, шумов аппаратуры и помех, были получены следующие результаты.
1. Разработана математическая модель процесса формирования РЛП распределенных объектов, с учетом условий наблюдения, характеристик и параметров аппаратуры наблюдения, траектории движения носителя РСА, произвольного движения наблюдаемых объектов, шумов аппаратуры и помех.
2. На основе анализа сложного движения морских судов по взволнованной морской поверхности, предложен статистический подход к описанию этого движения в интересах моделирования РЛИ.
3. Получено аналитическое решение для определения искажений вносимых движением наблюдаемого объекта, при этом введены функции искажений радиолокационных портретов в пространственной и частотных областях. Предложенное решение обладает универсальностью в отношении траектории движения, а так же позволяет получить (понять) структуру формируемого РСА радиолокационного изображения от движущихся распределенных целей.
4. Разработан эффективный алгоритм численного решения задачи электромагнитного рассеяния на идеально проводящих телах сложной формы в высокочастотном приближении, основанный на методах физической оптики и эквивалентных токов — элементарных краевых волн Михаэли — Уфимцева, который использует особенности процесса формирования РЛП для сокращения вычислительных затрат, пригоден к параллельной обработке и реализуем в реальном масштабе времени.
5. Анализ достоверности математической модели показывает достаточно высокую близость результатов моделирования РЛИ самолетов и кораблей их реальным изображениям. Отличие моделированного и реального РЛИ объясняется неточностью задания условий наблюдения и параметров РСА, электрических свойств объекта.
6. Для практической реализации модели на ЭВМ разработан программный комплекс моделирования РЛП общим объемом более 11 ООО строк на языке программирования языке С++ с использованием интегрированной среды разработки Builder С++, функционирующий под операционными системами MS Windows 98/NT4/2000/XP. Комплекс программ разработан по открытому модульному принципу и легко может быть модифицирован путем замены соответствующего модуля (решение задачи дифракции, моделирование движения объекта и т. д.).
Предложенная в работе методика математического моделирования была разработана с учетом возможности ее уточнения и развития в области каждой из шести составляющих: моделирование поверхности, решение задачи радиолокационного рассеяния на объекте, моделирование движения объекта, моделирование траекторных нестабильностей носителя РСА, моделирование тракта формирования радиолокационного сигнала и математическое моделирование тракта обработки радиолокационного сигнала в РСА. К числу не реализованных в настоящее время возможностей математической модели относится учет отражений от подстилающей поверхности и микрорельефа реальных объектов, взаимное влияние отражений от объекта и фона.
Список литературы
- Бакалов В.П. Цифровое моделирование случайных процессов. — М.: Сайнс-Пресс, 2002. 89с.
- Бакут П.А., Мандросов В. И., Матвеев И. Н. Теория когерентности изображений. М.: Радио и связь, 1987. 243с.
- Благовещенский С.Н. Качка корвбля. Л.: Судпромгиз, 1954. 520с.
- Боровиков В.А., Кинбер Б. Е. Геометрическая теория дифракции. М.: Сов. радио, 1978.
- Васильев Е.Н. Возбуждение тел вращения. М.: Радио и связь, 1987.
- Дудник П.И., ЧересовЮ.И. Авиационные радиолокационные устройства. / Под ред. Дудника П. И. М.: ВВИА им. проф. Н. Е. Жуковского, 1986.
- Жермен-Лакур П., Жорж П. Л., Пистр Ф., Безье П. Математика и САПР. М.: Мир, 1989.
- Зарубежное военное обозрение. М.: «Красная звезда», № 1−12, 2003.
- Зарубежное военное обозрение. М.: «Красная звезда», № 1−12, 2004.
- Захаров Е.В., Пименов Ю. В. Численный анализ дифракции радиоволн. — М.: Радио и связь, 1982.
- Ильинский А.С., Кравцов В. В., Свешников А. Г. Математические модели электродинамики. М.: Высшая школа, 1991.
- Кинг Р., Тай-Цзунь У. Рассеяние и дифракция электромагнитных волн. -М.:ИЛ, 1962.
- Корбанский И.Н. К вопросу о дифракции электромагнитных волн вблизи выпуклых тел вращения. М.: ВВИА им. проф. Н. Е. Жуковского, 1957.
- Корбанский И.Н. Основы электродинамики высоких частот. М.: ВВИА им. проф. Н. Е. Жуковского, 1953.
- Красовский А. А. Системы автоматического управления полетом пилотируемых летательных аппаратов. М., ВВИА им. проф.Н. Е. Жуковского, 1971.
- Крылов Н.М., Боголюбов Н. Н. Введение в нелинейную механику. Киев. Изд-во АН УССР, 1937. 342с.
- Лифанов И.К. Метод сингулярных интегральных уравнений и численный эксперимент в математической физике, аэродинамики, теории упругости и дифракции волн. — М.: ТОО 'Янус', 1995.
- Луговский В.В. Гидромеханика. Л.: Судостроение, 1990. 190с.
- Луговский В.В. Качка корабля.С-П.: Судостроение. 1999. 424с.
- Математические модели РСА. Часть 1: Математическое моделирование траекторного сигнала в РЛС с синтезированной апертурой. / Под ред. Г. С. Кондратенкова. М.: ВВИА им. проф. Н. Е. Жуковского, 1992.
- Островитянов Р.В., Басалов Ф. А. Статистическая теория радиолокации протяженных целей. М.: Радио и связь, 1982. -232с.
- Павлов А.С. Военные корабли СССР и России: 1945−1995 гг. Справочник. Выпуск 3. Якутск, 1994.
- Поздняков В. Г. Школьный Л.А. Дискретные сигналы и цифровые фильтры. -М.: ВВИА им. проф. Н. Е. Жуковского., 1970.
- Помехозащищенность радиосистем со сложными сигналами. /Г.И. Тузов, В. А. Сивов, В. И. Прытков и др.- Под ред. Г. И. Тузова.-М.: Радио и связь, 1985.
- Потехин А.Н. Некоторые задачи дифракции электромагнитных волн. — М.: Сов. радио, 1948.
- Радиолокационные станции бокового обзора. /А.П. Реутов, Б. А. Михайлов, Г. С. Кондратенков, Б.В. Бойко- Под ред, А. П. Реутова. М.: Сов. радио, 1970.
- Радиолокационные станции обзора Земли / Г. С. Кондратенков, В. А. Потехин, А. П. Реутов, Ю. А. Феоктистов- Под. ред. Г. С. Кондратенков. М.: Радио и связь, 1983.
- Радиолокационные станции с цифровым синтезированием апертуры антенны / В. Н. Антипов, В. Т. Горяинов, А. Н. Кулич и др. Под Ред. В. Т. Горяинова.-М: Радио и связь, 1988.
- Радиолокационные характеристики летательных аппаратов / М. Е. Варганов, Ю. С. Зиновьев, Л. Ю. Астанин и др.- Под ред. Л. Т. Тучкова. М.: Радио и связь, 1985, -236с.
- Распространение ультракоротких волн. Пер. с англ. / Под ред. А. Б. Шиллерова. — М.: Сов. Радио, 1954.
- Ремез Ю.В. Качка корабля. Л.: Судостроение, 1983.
- Ремез Ю.В. Качка судна на нерегулярном волнении. Николаев, 1973.
- Рытов С.М. Введение в статистическую радиофизику. М.: Наука, 1966.
- Семенов-Тян-Шанский В.В., Благовещенский С. Н., Холодилин А. Н. Качка корабля. Л.: Судостроение, 1969. 392с.
- Справочник по радиолокации: Том 1. Основы радиолокации. / Под ред. М. СКОЛНИКА. Пер. с англ. М.: Сов. радио, 1976. — 456с.
- Справочник по специальным функциям. Под ред. М. Абрамовича и И. Стиган. Перевод сангл. под ред. В. А. Диткина и Л. Н. Кармазиной. -М. «Наука», 1979.
- Тихонов В. И Статистическая радиотехника. — М.: Радио и связь, 1982.
- Тихонов В.И. Нелинейные преобразования случайных процессов. М.: Радио и связь, 1986.
- Уфимцев П.Я. Метод краевых волн в физической теории дифракции. — М.: Сов. радио, 1962.
- Фоли Дж., Вэн Дэм А. Основы интерактивной машинной графики: В 2-х книгах. Кн. 2. Пер. с англ. М.: Мир, 1985.
- Хаскинд М.Д. Гидродинамическая теория качки корабля. М.: Наука, 1973.327с.
- Хенл X., Мауэ А., Вестпфаль К. Теория дифракции. — М.: Мир, 1964.
- Хермен Г. Восстановление изображений по проекциям. Основы цифровой томографии. -М.: Мир, 1983.
- Штагер Е.А. Рассеяние радиоволн на телах сложной формы. М.: Радио и связь, 1986.-183с.
- Штагер Е.А., Чаевский Е. В. Рассеяние радиоволн на телах сложной формы. М.: Сов. радио, 1974. — 240с.
- Code of intact Stability for all Types of Ships. JMO. Res. A. 749, London, 1993.109p.147 IXBT.COM № 1−11, 2004.
- Knott E.F., Schaeffer J.F., Tuley M.T. Radar cross section. N.Y.: Artech House, 1985.
- Mensa D.L. High resolution radar cross-section imaging. Boston: Artech House, 1991.
- Moore R.K. Radar from ground/ -Univ. of Kansas Pull., 1969.
- OpenGL. Официальный справочник: Пер. с англ./Под ред. Дейва Шрейнера. СПб: ООО «ДиаСофтЮП», 2002. — 512с.
- Warplanes. The ultimate encyclopedia of military aircraft and aviation. — London, Maris Multimedia Ltd., 1994.2 Статьи
- Антифеев B. H, Борзов А. Б., Быстрое Р. П., Исаев И. Ш., Соколов А. В. Математические модели рассеяния электромагнитных волн на объектах сложной формы. Электромагнитные волны и электронные системы, 1998, № 10, с. 38−54.
- Анфиногенов А.Ю. Моделирование радиолокационного портрета бесконечно тонкой идеально проводящей плоской пластинки. / НММ поцифровой обработке сигналов. Под ред. Е. Ф. Толстова. Сб. статей. М.: ВВИА им. проф. Н. Е. Жуковского, 1995, с. 3−18.
- Анфиногенов А.Ю., Школьный Л. А. К вопросу о математическом моделировании радиолокационных портретов распределенных объектов. -Радиотехника, № 10, 1996.
- Анфиногенов А.Ю., Школьный Л. А. Методы математического моделирования радиолокационных изображений искусственных распределенных объектов. Заруб, радиоэлектроника, № 2,1998, с.49−58.
- Борзов А.Б. Анализ радиолокационных характеристик объектов сложной формы методом математического моделирования. — Боеприпасы, 1994, № 3,4, с. 32−38.
- Буторин Д.И., Мартынов Н. А., Уфимцев П. Я. Асиптотические выражения для элементарных краевых волн. — Радиотехника и электроника, т. 32, № 9, 1987, с. 1818−1828.
- Гидродинамика корабля. Сборник научных статей. / Под. Ред. Александрова. Николаев, 1989.
- Гидродинамика корабля. Сборник научных статей. / Под. Ред. Александрова. — Николаев, 1990.
- Голиков А.В. Состояние отечественного рынка систем конструкторской графики. PC Week Russian Edition, № 24, 1996, с. 45−46.
- Горкин Ю.С., Радзиевский В. Г. Вероятностная модель флуктуаций амплитуды (мощности) радиолокационных негауссовских сигналов. — Радиотехника, № 6, 1997, с.73−80.
- Еремин Ю.А., Зимнов М. Х., Кюркчан А. Г. Теоретические методы анализа характеристик рассеяния электромагнитных волн. Стационарные задачи. — Радиотехника и электронника, т.37, № 1, 1992, с. 14−31.
- Зернов Н.В. О решении нестационарных краевых задач электродинамики. ДАН СССР, т.80, № 1, 1951, с.33−35.
- Зиновьев Ю.С., Пасмуров, А .Я. Методы обращенного синтезирования апертур в радиолокации с помощью узкополосных сигналов. -Зарубежная радиоэлектроника, № 3, 1985, с. 27−39.
- Карпов О.А., Вашкевич С. А. Адаптивные алгоритмы синтезирования апертуры антенны. Цифровая обработка сигналов в РСА. Сб. статей. / Под ред. Е. Ф. Толстова. Смоленск: Изд-во ВА ВПВО ВС РФ, 2004. с.31−44.
- Каюмджан Р.Г., Патхак П. Г. Равномерная геометрическая теория дифракции на идеально проводящей поверхности с ребром. — ТИИЭР, т. 62, № 11, 1974, с. 40−55.
- Кенно Е.М., Моффатт Д. Л. Аппроксимация переходных и импульсных переходных характеристик. — ТИИЭР, т.53, № 8,1965, с.65−86.
- Луговский В.В., Красницкий А. Д., Полухин К. В. и др. Гидродинамические характеристики продольной и бортовой качки серии моделей высокобортных морских судов // Труды ЛКИ: Средства и методы повышения мореходных качеств судов. Л., 1989. с.32−37.
- Менса Д.Л., Халеви И!., Уэйд Г. Применение методов когерентной доплеровской томографии для получения изображений на СВЧ. -ТИИЭР, т. 71, № 2, 1983, с. 76−84.
- Миллер Е., Поджио А. Применение метода моментов в электромагнитных задачах. / Численные методы теории дифракции: Сб. статей, Пер. с англ., М.: Мир, 1982, с.9−46.
- Монин М. А., Ягудина И. М. Радиолокационная заметность самолетов (по материалам открытой иностранной печати). Обзор № 665, 1986.
- Петренко С.А. Самолет-«невидимка» ВВС США F-117A «Блэк Джет».