Методика (порядок) составления линейных дифференциальных уравнений
Аналогично, поделив уравнение (1.32) на уравнение (1.35), получим: Перемножим эти два уравнения: Ly, гу— параметры обмотки управления; L4, гч — параметры поперечной цепи. Определяются входные и выходные переменные величины каждого звена. Тогда дифференциальное уравнение в операторной форме запишется: Аналогично: ~ — постоянная времени коротко замкнутой цепи и. Где — - — постоянная времени обмотки… Читать ещё >
Методика (порядок) составления линейных дифференциальных уравнений (реферат, курсовая, диплом, контрольная)
- 1. Система расчленяется на отдельные звенья.
- 2. Определяются входные и выходные переменные величины каждого звена.
- 3. Составляется уравнение динамики каждого звена.
- 4. Составляется характер зависимости переменных величин звена от различных факторов (либо линейная, либо нелинейная зависимость).
- 5. Осуществляется линеаризация полученных нелинейных уравнений (если это возможно) при помощи разложения в ряд Тейлора (при отсутствии разрывов и неоднозначности в характеристиках).
- 6. Для получения линеаризованного уравнения в отклонениях составляется уравнение статики; из уравнения динамики вычитается уравнение статики.
- 7. Из уравнений динамики отдельных звеньев составляется уравнение динамики системы регулирования в целом путем исключения промежуточных переменных величин.
Уравнения типовых звеньев систем автоматического регулирования
К типовым звеньям САР относятся: генератор постоянного тока, элекгромашинный усилитель поперечного поля, двигатель постоянного тока, система Г-Д — это наиболее распространенные электрические звенья.
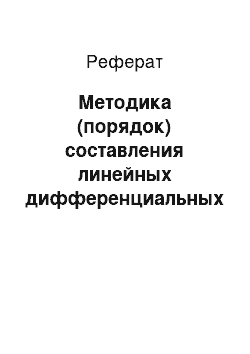
В качестве примера рассмотрим элсктромашинный усилитель (ЭМУ) поперечного поля — двухступенчатый машинный генератор (рис. 1.12).

Рис. 1.12. Электрическая схема ЭМУ поперечного поля:
Ly, гу— параметры обмотки управления; L4, гч — параметры поперечной цепи
Допущение: ЭМУ является линейным звеном, т. е. индуктивность постоянна и не зависит от тока в обмотках.
Составим ряд уравнений.
Дифференциальное уравнение обмотки управления (ОУ):

Аналогичное уравнение для поперечной цепи:

Значение Еч зависит от тока управления (при соответствующих допущениях линейная зависимость): 
Выходная величина:

Из уравнений (1.29)—(1.32) может быть получено одно уравнение. Запишем уравнения (1.29) и (1.30) в операторной форме и разделим на гу: 
где — - - постоянная времени обмотки управления, тогда.
гу
Lq 
Аналогично: ~ - постоянная времени коротко замкнутой цепи и.
гч

Поделив уравнение (1.31) на (1.34), получим:

Аналогично, поделив уравнение (1.32) на уравнение (1.35), получим:  Перемножим эти два уравнения:
Перемножим эти два уравнения: 
Числитель уравнения (1.38) представлен постоянным коэффициентом и называется статическим коэффициентом передачи ЭМУ:

Тогда дифференциальное уравнение в операторной форме запишется: 
и в обычной форме:

В левой части уравнения (1.41) записываются выходные величины, начиная со старшей производной, в правой части — входные величины.