Моделирование процессов взаимодействия системы «козловой кран-крановый путь» в условиях лесного склада
Особого внимания заслуживает исследования надёжности механизмов и металлоконструкций портальных кранов иод руководством д.т.н. В. И. Брауде (ЛИИВТ), а также работа д.т.н. А. А. Зарецкого. В них ставилась цель разработать и внедрить новую систему норм и методов расчёта по предельным состояниям, направленную на создание эффективных башенных кранов и спи жение их металлоёмкости. Краны… Читать ещё >
Содержание
- 1. СОСТОЯНИЕ ВОПРОСА II ЗАДАЧИ ИССЛЕДОВАНИИ
- 2. МЕЮДИКА ПРОВЕДЕНИЯ ОБСЛЕДОВАНИЯ КРАНОВЫХ 11УI ЕЙ
- II. ЕЁ ОПРОБИРОВАНИЕ НА ПРЕДПРИЯТИЯХ ЛЕСНОГО КОМПЛЕКСА
- 2. 1. Общие положения
- 2. 2. Анализ результатов обследования крановых п)1ей лесопромышленных предприятий Свердловской обллсш
- 2. 2. 1. I laIурные тмерения нллново-высогною положения крановых п) iei’i и их рез) льгагы
- 3. 1. Общие положения
- 3. 2. Общая характеристика системы. Цель и методы исследований
- 3. 4. Опенка динамики движения лесною переф>жа1еля по реальным крановым п)1 ям
- 3. 5. Решение дифференциальных) равнении сиаемы «КК — К1Г
- 4. 1. Общие положения. Цель и шдачи зкеиерпмешальных исследовании
- 4. 3. Статические и динамические характеристики крана и п> ги
- 4. 3. 1. Измерения на кране
- 4. 3. 2. Измерения на крановом п> ш
- 4. 4. Методика экспериментальных исследований и основные элемешы оркшизации и проведения
Моделирование процессов взаимодействия системы «козловой кран-крановый путь» в условиях лесного склада (реферат, курсовая, диплом, контрольная)
Рассматривая кран и крановый путь, как элементы единой системы, в процессе эксплуатации, взаимно влияют друг на друг а. Состояние крановых путей существенно отражается на безопасности, бесперебойности и рентабельности эксплуатации кранов. Отклонения параметров кранового пути от нормативных, можег явиться той последней «каплей», которая ведёт к аварии материальным и человеческим потерям. Высоко чувствителен к параметрам пути кран, чей технический ресурс исчерпан или близок к этому.
Па предприятиях Уральскою OKpyia Госгортехнадзора значительная доля кранов, порядка 70% исчерпали свой технический ресурс. В свою очередь, этот парк кранов, эксплуатируется на более чем 1100 км крановых путей различных конструкций, чьё техническое состояние в большинстве случаев не удовлетворяет нормативным требованиям. Обследуя на предприятиях лесною комплекса Свердловской области 40 крановых путей, было установлено, что пи один обследованный путь не удовлетворяет требованиям, причём отклонения параметров превышают допускаемые значения в 1,5−3 раза [34, 35]. Интенсивная эксплуатация крановых путей в прошлом, превращает задачу их содержания в технически исправном состоянии в сложную каиита-лои материалоёмкую проблему.
Принимая во внимание вывод, сделанный дл.н. А. А. Короткий и другими, что критерием оценки безопасности эксплуатации крапов мостовою типа, устанавливаемых в зданиях и сооружениях, является значения амплитуды и частоты опорной реакции, возникающей в системе «Кран — рельсовый путь», то есть, частотный анализ позволяет, по мнению авторов оценивать безопасностьэксплуатации мостовых кранов техническими рисками [ 32 ].
Очевидно, что эта задача не менее актуальна для кранов, эксплуатируемых на наземных крановых путях в сложных природно-климатических и производственных условиях, а в особенности на предприятиях лесного комплекса.
Во всех ранее опубликованных работах, авторы нредла1 ают определять реакции взаимодействия системы «Кран — рельсовый путь» путём проведения экспериментальных замеров с помощью датчиков измерений реакции во времени, при многократном выполнении технологической программы с последующей статистической обработкой полученных результатов. Это, по мнению авторов, исключает работы, но обследованию крановых путей с целью выявления дефектов. Мы усматриваем в этом не/приемлемость такою подхода для кранов, эксплуатируемых на наземных путях, ввиду большой сложности такой методики. Более простым и экономичным для практики видится путь проведения обследования крановых путей с последующим моделированием системы «Кран-путь» на ЭВМ с учётом тех реальных параметров путей, которые статистически превалируют. Другой целыо моделирования системы «Кран-путь» является получение широкою спектра альтернатив выбора рациональною варианта её эксплуатации — устранения дефектов пути, краназамена конструкций, крана и т. д.
Из вышеизложенною, можно сформулировать следующую цель исследований — разработка научной методики прогнозирования и расчёта величины опорной реакции в основных элементах механической системы, включая в себя кран и крановый путь («Кран — путь»).
1. СОСТОЯНИЕ ВОПРОСА И ЗАДАЧИ ИССЛЕДОВАНИЙМеханика переднижения рельсо-колёсных, в том числе и козловых кранов общего назначения, разработана достаточно подробно. Приоритет в вопросах исследования сопротивления движению, перекосных нагрузок козловых кранов общего назначения получили работы И. И. Абрамовича [1,2,3,4,5,6,], в которых проанализировано влияние различных факторов на величину сопротивления ходовых тележек, вызывающих появление перекосов и перекосных нафузок.
К основным особенностям козловых кранов, вызывающих возникновение перекосных нагрузок и влияющими на сопротивление передвижению отнесены: — существенный разброс в сопротивлению роторных цепей двигателей тележек— вероятность установки колёс со значительными отклонениями от ГОСТов, что вызвано недостаточно высокой культурой изюювления и монгажа кранов, а также затруднённостью контроля положения ходовых колёс— сравнительно малое отношение пролёта к базе кранов— высокое сопротивление передвижению от сил ветра и уклона крановых путей и т. д.
В развитие теории взаимодействия пути и подвижно1 о состава ж/д транспорта большой вклад внесли российские учёные В. Ф. Вериго, С. В. Вертинский, А.М.Годыцкий-Цвирко, В. Н. Данилов, В. А. Лазарян, П. П. Петров, И. И. Челноков, В. Ф. Яковлев и др. 16,17,18,22,25,42,47,72,74]. Они выявили и сформулировали общие закономерности взаимодействия пути и подвижноюсостава на объектах железнодорожного транспорта.
Так, исследованиями Н. П. Петрова и др. было установлено, что вертикальные силы инерции неподрессоренных масс в большинстве случаев является наибольшей компонентой в общем динамическом усилии, передаваемом колёсами рельсам при движении подвижного состава, но пути, причинами их возникновения могут быть колебания из-за переменною характера сил, прилагаемых к колёсной паре, неровности рельсового пути и на колёсах, извилистое движение колёсных пар и др. Отмечается, что в приближённых расчётах вполне допустимо принятие гипотезы академика П. П. Петрова о том, что зависимость между реакцией рельса и ею ynpyi им прогибом иод колесом в динамических процессах не отличается от той же зависимости в статике [47].
Эти общие закономерности были уточнены в исследованиях закономерностей взаимодействия кранов и крановых путей, выполненных А.И.Альпе-рович, Г. М. Банных, В. И. Брауде, В. А. Буком, В. И. Богдановым, В. М. Волиным, А. В. Глазовым, Г. И. Гниломедовым, А. В. Голенищевым, Б. А. Евдокимовым, А. А. Зарецким, В. П. Ивановым, С. А. Казаком, В. В. Карповым, И. Я. Коганом, А. С. Конопля, А. А. Коротким, И. С. Леваковым, А. С. Липатовым, М. Д. Полосиным, В. И. Поляковым, В. Б. Резниковым, М. А. Фришманом, С. П. Усовым, Б.Ф. ХазовымДМ. Шевниным, Г. А. Штелингом и др. [7,12,14,15,19,23,24,27,29,31, 32,38,39,41,42,55,66,68,69 ].
Достаточно подробно в этих работах, проанализированы все выше отмеченные факторы, приведены количественные результаты экспериментальных исследований влияния тех или дру1их факторов на загруженность механизмов передвижения крапов, на загруженность их металлоконструкции.
В целом проблема исследования взаимодействия кранов и крановых путей имеет различные аспекты: — определение нагрузок на опоры крана— изучение траектории упругой линии, описывающей, реальный рельсовый путь— изучение траектории движения крана по реальному пути— изучение силовою взаимодействия крановых ходовых колёс с теоретическими и реальными крановыми путями и др.
К числу факторов, влияющих на сопротивление движению крана и на величину перекосных нагрузок, в некоторых работах, И. И. Абрамовича, Г. А. Котельникова [6], В. И. Алябьева и др. 8], В. П. Балашова [11], авторы относят и влияние технического состояния крановых путей на увеличение сопротивления движению крана.
К примеру, в работе И. И. Абрамовича и Г. А. Котельникова рекомендуется для неудовлетворительного состояния крановых путей величины сопротив= лений от трения реборд и тому подобных факторов принимать на 20−60% больше, чем на путях с хорошим техническим состоянием.
В работе В. И. Алябьева и др. при определении режимов работы консольно-козловых кранов на лесных складах состояние подкрановых путей оценивается как «хорошее», «удовлетворительное» и «неудовлетворительное». Какой либо количественной оценки при этом не даётся. Не приведены также критерии, но которым можно было бы классифицировать уровень технического состояния крановых путей.
Аналогичная оценка технического состояния крановых путей проводится и в работе В. П. Балашова, где при проведении экспериментов по замеру сопротивления движению крана и перекосных на1рузок состояние путей оценено только одним словом «удовлетворительное», не дается вывода о значительном влиянии на траекторию движения мостовою крана неровности пути. При моделировании движения мостовых и козловых кранов он пользуется схемой в виде двухмассовой односвязной динамической системы с линейным упругим звеном. В ею модели все массы элементов системы приведены к опорам (для козловых) или к концевым балкам (для мостовых) кранов, а другое звено имеет коэффициент жёсткости моста крапа в юризонтальной плоскости. При необходимости учёта массы ipyja расчётная модель усложняется путём введения третьей массы, соединённой упругим звеном с одной из масс крана.
На необходимость поддержания подкрановых путей в хорошем состоянии указывается в работе П. И. Ерофеева [26], где на основе экспериментов установлено, что техническое состояние путей существенно увеличивает на сопротивление движению портальных кранов (удельное сопротивление передвижению увеличивается на 31−67%), а износ реборд в основном зависит от перекосных нагрузок.
Впервые математическая зависимость, связывающая силу перекоса и сопротивления движению опор, была получена И. М. Бершардом [13]. Сила перекоса определялась как полуразность сопротивлений движения опор, но в формуле коэффициент разброса сил перекоса к=1. Это равенство иреемлемо лишь при идеально одинаковых механизмах передвижения опор. Выводы, полученные автором, позволяют установить, что при близких значениях сопротивлений движению опор крана, коэффициент «к» резко влияет на величину перекосных сил.
Ряд работ по исследованию перекосов козловых кранов и nepei ружателей опубликованы профессором М. Шеффлером [70.71]. В них рассматривается общий случай движения опор с неодинаковыми приводами и уточнено влияние разброса отдельных параметров. Методом введения и наложения отдельных погрешностей был выведен фактор неравномерности «w», аналогичный коэффициенту разброса. Был получен интервал значений «w» от 5,4 до 0,185.11ри расчётах обычно используют значения w равные 1,5 и 0,667 (для случаев забегания жёсткой и гибкой опор).
В работах А. В. Голенищева и др. отмечено, что особенностью работы кранов на лесных складах заключается в выполнении не столько погрузочно-раз-I рузочных операций, сколько работы по перемещению i рузов на длину до 600−800 м и более. Результаты наблюдений за состоянием кранов, показали, что часто кран, совершивший сравнительно небольшое число циклов по подъёму груза, выходит из строя раньше другого крана, сделавшего при работе с той же интенсивностью большее число циклов, но работающего в условиях, не требующих длительных перемещений. Отсюда был сделан вывод, что в существующих методиках расчёта крапов влияние перекосных нагрузок на процесс накопления усталостных повреждений не учитывается в достаточной мере с учётом специфики работы кранов на лесопромышленных предприятиях [23,24].
В работах А. С. Конопля, В. П. Иванова, В. А. Бука, В. Ф. Фомичёва установ-ленно, что на величину на1рузки на ходовые колёса кранов влияют: зазоры между ребордами и рельсами, жёсткость крановою пути в горизонтальном направлении [15,31,39,67].
В.Ф.Фомичёвым предложена динамическая модель крана с переменной структурой. При движении крана вдоль рельсов, металлоконструкция представлялась в виде четырёхмассовой упругой модели (три сосговляющих массы крана, приведённые к опорам и середине пролёта, и массы груза). При движении поперёк рельса металлоконструкция представлялась в виде шести-массовой модели (каждая из масс крана, приведённых к опорам, делилась на две части). В работе обоснована возможность существенною упрощения модели.
В.Н.Иванов, изучал влияние крановою пути на движение мостового крана, рассматривал совокупность данных геодезической съёмки пути как реализацию случайной функции. В работе приводится автокорреляционная функция плановых смещений рельсов, полученная в результате исследования только 8 крановых путей. Показано, что несовершенство укладки кранового пути в плане оказывает большое влияние на движение крана, предложена классификация качества крановых путей.
Большинство авторов, исследующих траектории движения мостовых кранов, признают сильное влияние неровностей крановых рельсов в горизонтальной плоскости на характер и величину перекосных нагрузок. В настоящее время стало традиционным представление неровностей рельсов в виде нормально распределенных стационарных случайных функций. При этом, из-за сложности геодезического обследования большою количества крановых путей, все авторы обычно ограничиваются сравнительно небольшой выборкой при оценке статистических характеристик данной случайной функции. Средние квадратические отклонения неровностей рельсов в плане, по данным различных авторов, имеют значительный разброс (смлабл 1.1).
Таблица 1.1Среднее квадратические отклонения неровностей рельсов в планеАвтор, источник Среднее квадратическое отклонение, ммБук В.А. [15] Волин Л. М. [19] Иванов В. Н. [31]5,8−21,4 5,8- 10,0 12,9−21,2Авторы используют различного рода апроксимации: от функции Дирака до сложных апроксимиругощих выражений, учитывающих скрытую периодичность исследуемой функции.
Особого внимания заслуживает исследования надёжности механизмов и металлоконструкций портальных кранов иод руководством д.т.н. В. И. Брауде (ЛИИВТ), а также работа д.т.н. А. А. Зарецкого [29]. В них ставилась цель разработать и внедрить новую систему норм и методов расчёта по предельным состояниям, направленную на создание эффективных башенных кранов и спи жение их металлоёмкости. Краны анализировались как упруго-динамические системы при типичных внешних силовых воздействиях, представляющие собой стационарные гауссовские процессы. На основании вывода сделанного А. А. Зарецким, о гом что колебания металлоконструкций, возникающие в результате пуска-торможения крапа, затухают в течении 5−15 сек., то есть за время весьма малое по сравнению с длительностью циклов работы кранов, в расчётах позволяет пренебрегать участками неустановившегося движения.
Необходимо отметить, что практически во всех работах не допускается количественной оценки влияния планово-высотного положения кранового пути на нагруженность элементов опор кранов. Причём в расчётах учитывается только один параметр — продольный уклон, значение которою принимается равным 0,003 (3%о). При этом упускается из виду то, что в одном поперечнике (на базе крана) возможны уклоны рельсовых нитей разного знака (±).
Вые отмечалось, что на перекосные нагрузки в значительной мере влияет неточность установки колёс ходовых тележек крана. Влияние это1 о фактора необходимо рассматривать с не параллельностью плоскости колеса оси рельса. По данным работ ВНИИПТМАШ она достигает 1/50 — 1/100 [2,4] при допустимом значении 1/1000. Правилами же [48.49] допускается отклонение рельса от прямой линии на длине 30 м при эксплуатации козловых кранов до 20 мм. (стрела юризонгальною изгиба рельса), это отклонение соответствует величине не параллельности в 1/75. При совпадении отклонения колеса и рельса не параллельность плоскости колеса и рельса на искривленном участке пути уже будет не 1/50 — 1/100 а 1/30 — 1/43, что существенно усугубляет условия передвижения крана и дополнительно увеличивает перекосные нагрузки.
В целом, на основании изучения состояния вопроса можно сформулировать следующие задачи исследований:1. Изучить и дать анализ существующих методов исследований взаимодействия крана и крановых путей-2. Разработать методику проведения обследования планово-высотного положения крановых путей и выполнить натурный эксперимент на предприятии лесного комплекса-3. Разработать математическую модель системы в обобщённых координатах.
4. Разработать методику экспериментальных исследований взаимодействиясистемы «Кран — путь».
5. Выполнить натурный эксперимент в условиях лесного склада, с целыо определения величин опорных реакций, на опытном и эталонном крановом пути.
2. МЕТОДИКА ПРОВЕДЕНИЯ ОБСЛЕДОВАНИЯ ПОЛОЖЕНИЯ КРАНОВЫХ ПУТЕЙ И ЕЁ ОПРОБИРОВАНИЕ НА ПРЕДПРИЯТИЯХЛЕСНОГО КОМПЛЕКСА2.1. ОБЩИЕ ПОЛОЖЕНИЯМноголетней практикой и специальными исследованиями установлены предельные значения допустимых отклонений геометрических параметров крановых путей от проектных. Которые не вызывают существенных нарушений условий работы кранов и мало влияют на траекторию их движения. В табл. 2.1. приведены максимально допустимые изменения соответствующих параметров путей в процессе их монтажа и эксплуатации [47.48].
Таблица 2.1Допуски и предельные отклонения размеров крановых путей№ п/п Допуски Наименование характеристик Козловые кр. Мостовые перег. При укл. В экспл. При укл. В экспл.
Для обеспечения безаварийной работы всех элементов системы «Кран-путь» необходимо проводить геодезический контроль, которому предшествует визуальный осмотр крапов и рельсовых путей с целыо определения их технического состояния.
Опыт эксплуатации системы «Кран-путь» показывает, что изменения параметров, приведенных в табл. 2.1, происходит неравномерно. Так, при стабилизации осадок уклоны изменяются незначительно, однако, изменение ширины колеи и прямолинейности рельсов приближаются к критическим значениям (юраздо быстрее, чем вертикальные уклоны).
Задачей i еодезического контроля является своевременное выявление сверхнормативных отклонений в той стадии, когда можно ограничиться рихтовкой пути или заменой отдельных ходовых колёс кранов и рельсов на отдельных участках кранового пути.
Контроль положения рельсовых путей производится с реперов опорной 1еодезической сети. Репера располагаются на расстоянии 15−20 см от ни рельсового пути, расстояние между реперами не должно быть более 150 мегров. Репера закладывают в вертикальном положении на глубину 1,6−2,2 метра без бетонирования, согласно рекомендациям УФИВПИМИ. Между реперами прокладывают замкнутый теодолитный ход с относительной линейной невязкой 1:5000. Измерение ширины колеи крановых путей производят с реперов опорной геодезической сети 50-ти стальной, метровой, прокомпариро-ванной рулеткой. При этом в найденную длину вводят поправки: за компари-рование (из ведомости компарирования рулетки), за температуру и провес.
Поправку за температуру вводят в том случае, когда разность между температурой при измерении и компарировании превышает 10 градусов. Поправку вычисляют по формулед/, =/.*.(/,-а (2.1)где / - ширина колеи, ма — коэффициент линейно! о расширения стали- /&bdquo—температура при измерении, град.-/4 — температура при компарировании, град.
Поправку за провес мерного прибора определяют по формулед/ = 1,1 '/2 (2' 24•р2 (}где q — вес 1 йог. м рулетки, кгр — натяжение рулетки, кг.
При измерении колеи отсчёты по рулетке берутся дважды с точностью до 1 мм. Исправленную ширину коле находят из выраженияlKrr=l + Alk+All+Alf (2.3)где А1к — поправка за компарирование.
Согласно теории ошибок измерений погрешность определения ширины колеи получаемт,=фпк +m,+mf (2.4)где mk, mt, mf — соответственно погрешности при компарировании, при измерении температуры и определении провеса.
При тк = 1 if if, mt = 1ии, mf = 2mt. Получим m i =2,4 ммучитывая чтоотклонение в расстоянии между осями крановых путей вовремя эксплуатации не должно превышать 12 мм (табл. 2.1), методика определения ширины колеи непосредственным способом обеспечивает необходимую точность.
Согласно исследованиям В. Н. Ганьшина и И. М. Репалова [20] noipeui-ность измерения параметров крановых путей не должна превышать 2/3 величины допуска, приведенного в табл. 2.1.|ш| -<2/3-А ,(2.8)где т — средняя квадратическая ошибка измеренной величиныА — значение измеренного параметра.
Рис. 2.1. Схема для определения ширины колеи косвенным способом" 7Грельсу—7——п*пк20 пк40JLрельсуТУТ ГБпк20пк40Рис. 2.2. Схема нивелирования подкрановых путейдставляя в выражение (2.8) максимальные отклонение в расстоянии между осями крановых рельсов во время эксплуатации, равное 12 мм получим|ш| -< 8. (2.9)Следовательно, принятая методика измерения ширины колеи косвенным способом не превышает технологического допуска.
Высотную съёмку крановых путей производят геометрическим нивелированием. Нивелирование осуществляют с нескольких станций, образующих замкнутый нивелирный ход (рис. 2.2), который примыкает к точке, не связанной с подкрановыми путями (репер геодезической основы).
Крановые пути перед производством нивелирования маркируют краской на шейке рельса и нумеруют. Одноимённые пикеты крановых путей располагают в перпендикулярных створах теодолитом /'-30, обеспечивающим точность измерения угла ±30″ .
Невязку в превышениях fh в замкнутом нивелирном ходе определяютпо формулеfh=mh4N, (2.10)где mh — предельная погрешность определения превышения между связующими станциями, ммN — число станций нивелирования.
Точность нивелирования, как известно, зависит от типа нивелира, способа нивелирования, длины визирною луча и условий измерения.
Длина крановых путей нижних складов, большинства лесопромышленных предприятий Уральской зоны не превышает 400.м. Учитывая это, разработана методика высотной съёмки крановых путей. Места установки нивелира (д) указаны на рис. 2.2. Количество станций нивелирования, в основном, не превышает шести.
Произведём расчёт погрешности нивелирования (mh) при условии использования нивелира II-3. Погрешность т, определяют по формуле/" •А/ п mт. =-. U.12)' 206 265 VВ соответствии с требованиями инструкции [зз] предельная величинаугла, г обусловленная наклоном визирной оси зрительной грубы, не должнапревышать 20″. Так как с одной стороны нивелира определяют одновременнонесколько точек, то превышение между связующими точками, удаленнымина расстоянии 100 м, определяют с погрешностью20″ -10 000 &bdquo-&bdquo-т, =-= 9,7 «и.
206 265Среднюю квадратическую ошибку отсчёта определяют по эмпириче (I Лской формуле т0 = 0,20—+ 0,03-/ (2.13)г'где / - длина визирною луча, мv — увеличение трубы- / - цена деления рейки, мм.
При / = 100и, v = 30″, / = Юш/, mQ = l, Oin/.
Среднюю квадратическую ошибку от наведения биссектора зритель-нй трубы штрих рейки определяют по формулеw"p=-7 • (2Л4)V-/7при / = 100i/, тр =0,2i/u.
Среднюю квадратическую погрешность установки пузырька уровня в нуль-пункт определяют по эмпирической формулет) =0,2-/ + 0,035- х (2.15)где т — цена деления уровня. При г = 15″ пу =0,7 к и.
Погрешность взгляда, обусловленную ошибкой установки пузырька в нуль-пункт, при длине визирного луча 100 м составит0,7−100 000.mh =-= 0,36 и 1/.ь 206 265Подставляя найденные погрешности в выражение (2.11) получим mh = ±-ф), 72 +1,02 + 0,22 +0,72 +0,32 = ±9,8 м м. 2По выражению (2.10) |/иА|-<-Д, где д = 30 in/, (табл. 2.1), имеемmh < 20 uu. Суммарная погрешность меньше ½ допуска на превышениерельсов, следовательно, рассмотренная и предлагаемая методика нивелирования с использованием нивелира Н-3 обеспечивает необходимую точность для оценки состояния крановых рельсовых путей.
С учетом изложенного разработана методика проведения обследования геометрических параметров крановых путей, а также программа построения графика плаиово-высотного положения.
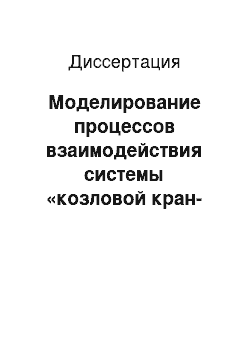
2.2. Анализ результатов обследования крановых nyieft лесопромышленных предприятий Свердловской обласш2.2.1 Натурные измерения планово-высотного положения крановых путей и их результатыИспользуя методику обследования планово — высотного положения крановых путей (приложение 1) нами, за период с 1982 года по 1992 год было обследовано более 40 крановых путей на лесопромышленных предприятиях Свердловской области [ 34,35 ]. Полученные графики планово-высотною положения свидетельствуют о том что отклонения рельсов от прямой линии как в плане, так и по высоте значительно превышают норму, носят случайный характер. Наглядным примером может служить график планово-высотного положения крановых путей Андриановско1 о леспромхоза (Серовский район, Свердловской обл.) рис. 2.3. Статисгическая обработка данного профиля приведена в работе [ 62 J.
По рисунку видно, что продольный профиль в целом представляет, площадку практически с нулевым уклоном (общий уклон около 0,19 — 0,77%о) Однако, па отдельных участках длиной 10 м рельсовые пути имеют уклон до 9%о алгебраическая разность уклонов на одном участке достигает 8,7%о. Нормативный размер колеи в целом соблюдается по всей длине пути за исключением пикета 3, где отклонение немного больше нормы (- 47 мм.), но рельсовые пути отличаются большой непрямолипейностыо (отклонение от прямой линии на длине 30 м достигает 67 мм вместо 20 мм по норме). Как правило, верхнее строение засорено, встречаются обрезки лесоматериалов.
В целом, обследование технического состояния проводилось в трех наиболее значительных производственных, лесозаготовительных районахtoUJГЧРис. 2.3. Планово-высотное положение крановых птей Андриановского ЛПХСвердловской области, Серовском, Нижнетагильском и Алапаевском. Результаты обследований приведены в таблицах [ 34,35 ].
Методами статистической обработки [ 74 ] получены некоторые характеристики параметров крановых путей лесопромышленных предприятий. Используя рекомендации [38] имеем, для точности 5% достаточно обрабатывать не более 120 измеренных значений каждого геометрическою параметра кранового пути. В соответствии с этим, получены гистограммы распределений уклонов каждого рельса в отдельности рис. 2.4 и алгебраической разности уклонов между соответствующими участками крановых путей рис. 2.5.
По гистограммам параметров подобраны функции распределений, вид которых, отражает нормальный заком распределения: — уклоны рельса «А» f (x)= l/2,14W27Cx e (x" 01) V9'2 (2.17) — уклоны рельса «В» f (x)= l/2,46xV27Cx e (4t0'06)712'2 (2,18) — алгебраическая разность уклонов рельса «А» и «В» (ia — ib) f (x)= l/2.65W2ixe (xt 003) V14 (2,19)где в каждой подобранной функции «х» соответствует «i «уклону между точками на базе 10 м. кранового пути.
Получаем средние значения уклонов с учётом знака табл. 2.2.
Рис. 2.4. Гистограммы и графики распределений уклонов крановых п) тей предприятий ТПО «Свердлеспром"Рис.2.5. Гистограммы и графики распределения алгебраической рашости уклонов направляющих Л и В крановых путей предприятии 1110 «Свердлеспром"Таблица 2.2Средние значения уклонов крановых путей на лесопромышленных предприятиях СвердловскойобластиПараметр, iВеличина, %о1АшIA±-2,0 ±3,0 ±-3,5Первый этап обработки результатов обследований указывает на то, что по, но абсолютным величинам средние значения уклонов крановою пуш удовлетворяют требуемым условиям. По обращает внимание факт присутствия их разнонаиравленности («+» и), т. е. абсолютное значение удовлетворяет нормативу, а показатель знака не оговаривается. На наш взгляд, это противоречие может в значительной мере влиять на эксплуатационные показатели крановых путей и кранового парка.
Во время проведения обследования техническою состояния крановых путей предприятий, чисто интуитивно в случайном порядке было проведено неоднократное, повторное обследование некоторых путей. В процессе обследований замечено, что за некоторый период времени геометрические параметры значительно изменяются, подтверждая свою случайность.
Этот факт определил следующий этап наших исследований, в которых необходимо было установить: — сезонный разброс геометрических параметров путей по опытномуучастку— определить скорости накопления остаточных деформаций крановых путей (опытного участка).
2.2.2. Анализ результатов сезонного обследования опытного участка кранового пути (крановый путь Коуровского леспромхоза) Сезонное обследование геометрических параметров, опытно1 о краново1 о пути, проводилось на основании приказа № 92 от 1 апреля 1987 г. по ТПО «Свердлеспром» и договора с СИПЛО. Опытный участок крановог о пути, по исследованию остаточных деформаций был, оборудован весной по предварительно составленной план-схеме. Геодезическая основа опытного участка и неподвижные реперы выполнены в соответствии рис. 2.6 — 2.7.
Заключительным этапом устройства опытною участка явилось, составление актов на заложение опытною участка кранового пути [ 37 ].
Для установления сезонного накопления остаточных деформаций кранового пути были проведены наблюдения за опытным участком в течение календарного года и разбиты на четыре группы: первая — весенняя группа — ускоренное оттаивание грунтовой призмыоснования кранового путивторая — летняя группа — устойчиваятретья — осенняя группа — постепенное замерзаниечетвёртая — зимняя — устойчивая (замораживание).
Период между наблюдениями составил 10−12 дней. В процессе наблюдений измерялись отклонения параметров крановою пути. По полученным графикам планово-высотного положения кранового пути построены диаграммы сезонпо! о накопления остаточных деформаций для наиболее харакнить АРП-fГм СЗ IГ 3иитьВ >4-РПЗ-Ol2§ РЛ2-С релыАПИаs voJ-СрВЛЬС оРЛ4toосРис.2.6. Схема размещения опорных точек базисных линий геодезической основы чля контроля11ланово-высотно1 о положения крановых птейК,=А-(а,-+ Ь,) — расстояние между рельсами, ммА — расстояние межд реперами в поперечнике;
ЗАКЛЮЧЕНИЕ
.
1. Установлено, в реальных условиях на лесных складах при эксплуатации козловых кранов (лесного перегружателя), в элементах системы «кран-нуть» возникают колебания, имеющие различные амплитудно-частотные характеристики и вызывающие процессы износа и разрушения элементов системы. Снижение сил взаимодействия в элементах исследуемой системы может быть достигнуто совершенствованием конструкций пути и крана, а также улучшением их технического состояния при эксплуатации.
2. Выявлено, что неровности кранового пути, как следствие непостоянной по ею длине жёсткости верхнего строения и неравномерною накопления остаточных деформаций в грунтовом основании, являются одной из основных причин колебаний крана. Эти явления наибольшую важность принимают в условиях специфики эксплуатации наземных крановых путей и кранов, исчерпавших свой технический ресурс.
3. За критерий оценки безопасности эксплуатации козловою крана можно принять, по аналогии с результатами исследований д.т.н. А. А. Короткого и др., значения амплитуды и частоты реакции, возникающей в системе «кран-путь». Амплитудно-частотный анализ реакции позволит оценивать безопасность эксплуатации кранов техническими рисками и прогнозировать вероятность аварийности при их эксплуатации.
4. Контроль за планово-высотными параметрами кранового пути является одной из основных задач эксплуатационников. Предложенная методика позволяет с достаточной точностью определять эти параметры.
5. Па основе разработанной методики компьютерная программа, позволяет непосредственно на лесном складе, оценить состояние кранового пути. Определять его наиболее опасные участки.
6. Расчеты на основании теоретической модели лесного перегружателя показали, что при ею работе на реальном пути он опирается в основном на 4 точки. При этом фактические значения реакции опор превышают теоретические, определённые по нормам, в среднем на 36%. Изменение реакций опор приводит к изменениям деформаций пути под нагрузкой, что является причиной отклонения опор от перпендикулярного в их плоскости положения. Отсюда зависимости между реакциями опор крана и внешней нагрузкой носят линейный характер, что не учитывается в настоящее время .
7. Разработанная математическая модель лесного перегружателя позволяет вести расчёты для условий его работы (передвижения) на неидеальном пути и нахождения груза в различных точках портала (моста) крана.
8. Моделирование движения лесного перегружателя по крановому пути в системе «Кран-путь» позволяет получить и обосновать: а) амплитудно-частотные характеристики опорных реакций в зависимости от основных параметров системы — податливости и расхождения продольных уклонов направляющих пути, положения грузаб) допустимые отклонения от нормативных параметров кранового путидля конкретных эксплуатационных условий работы кранав) управляющие воздействия на систему путём диагностирования состояния крановою пути и выявления наиболее неблагоприятных условий работы крапа.
9. Натурным экспериментом подтверждена необходимость дифференцирования нормативов содержания крановых путей от их жёсткости (податливости)-для жёстких путей эти нормы должны быть ужесточены .
10. В действующие нормативы содержания крановых путей лесною перегружателя необходимо введение нового показателя — допустимое расхождение уклонов кранового пути по диагонали на базе 10 м 40−60 мм оказывающее существенное влияние на прирост величины реакции в системе «Кран — путь».
Список литературы
- Абрамович И.И. К вопросу определения сопротивления движению козловых кранов общего назначения./ И.И.Абрамович// Труды ВНИИПТ МАШ.-М.:-1965.-Вып. 11(64), — С. 36−75.
- Абрамович И.И. Исследование механизмов передвижения в условиях эксплуатации./ И. И. Абрамович, М.И.Лукьянов// Труды ВНИИПТМАШ. -М.: -1965.-Выи. 4(57),-С. 102−136.
- Абрамович И.И. Расчёт металлической конструкции козловых кранов общею назначения./ И.И.Абрамович// Труды ВНИИПТМАШ. -М.М965.-Вып. 11(64), С. 248.
- Абрамович И.И. Динамические перекосные нагрузки в козловых перегрузочных кранах./ И.И.Абрамович// Труды ВНИИПТМАШ. М.:-1968. -Вып. 2(82), — С. 3−25.
- Абрамович И.И. Методика испытания козловых кранов/ И.И.Абрамович// Труды ВНИИПТМАШ. М.:-1968.- Вып. 2(82).- С. 177−205.
- Абрамович И.И. К расчёту опор козловых кранов./ И. И. Абрамович, Л. П. Куклева, Н. П. Копылец // Труды ВНИИПТМАШ. Исследование крановых металлоконструкций. Пневмогидро-и электрооборудование. Эргоно-мика.-М.:-1980.- С. 12−21.
- Абрамович И.И. Козловые краны общего назначения./ И. И. Абрамович, Г. А. Котельников.- М.: Машиностроение, -1983. 232 с.
- Альперович А.И. Устройство и эксплуатация подкрановых путей на строительстве./ А. И. Альперович, М. Д. Полосин, В.И.Поляков-М.:-1975.- 83 с.
- Алябьев В.И. Условия и режимы работы консольно-козловых кранов в лесозаготовительных предприятиях./ В.И.Алябьев// Труды ВНИИПТ MAIii.-М.-1968.-Вып. 2(82).-С 83−94.
- Анкудинов Д.Т. Шахтные пневмоколёсные самоходные машины / Д. Т. Анкудинов.- М.: Недра,-1984. 256 с.
- Бабков В.Ф. Основы грунтоведения и механики грунтов/ В. Ф. Бабков, В. М. Безрук.- М.: Высшая школа,-1976. 328 с.
- Балашов В. Г1. Экспериментальное определение сил перекоса козлового крана УК-25−50./ В.П.Балашов// Труды ВНИИПТМАШ.- М.:-1968.- Вып. 2(82).-С. 95−110.
- Банных Г. М. Совершенствование конструкции инвентарных секций рельсовых путей строительных башенных кранов с железобетонными иод-рельсовыми опорными элементами: дисс.. канд.техн.наук/ Банных Геннадий Михайлович.- Л.,-1986. -205 с.
- Berngard I.M. Die Statik der Bruckenkranen. -1925. 102 с.
- Брауде В.И. Вероятностные методы расчёта грузоподъёмных машин/ В. И. Брауде.- Л.,-1978.- 231 с.
- Бук В. А. Разработка методики определения динамических нагрузок кранов мостового типа на основе анализа случайных колебаний при движении: дисс. .канд.техп. наук/ Бук Вениамин Анатольевич.- Челябинск,-1986. -214 с.
- Вериго М.Ф. Проблемы взаимодействия пути и подвижного состава/ М. Ф. Вериго.- М.: Лесная прмышленность,-1967.- 220 с.
- Вериго М.Ф. Взаимодействие пути и подвижного составава./ М. Ф. Вериго, А. Я. Коган.- М.: Транспорт,-1986.- 559 с.
- Вертинский С.В. Динамика вагона/ С. В. Вертинский, В. П. Данилов, И. И. Челноков.- М.: Транспорт, -1978.- 352 с.
- Волип Л.М. Действительная работа рельсовых путей башенных кранов/ Л. М. Волин, Г. А.Штеллинг// Сб. Строительные и дорожные маши- ны.-М.,-1966.- Выи.З.-С. 52−58.
- Ганынин В.Н. Геодезические работы при строительстве и эксплуатации подкрановых путей/В.П.Ганьшин, И. М. Репалов.- М.: Недра,-1980.- 168 с.
- Гастев Б.Г. Основы динамики лесовозного подвижного состава/ Б. Г. Гастев, В. И. Мельников.- М.: Лесная промышленность,-1967.- 220 с.
- Годыцкий-Цвирко A.M. Взаимодействие пути и подвижного состава/ А.М.Годыцкий-Цвирко.- М., -1931.- 215 с.
- Голенищев А.В. Исследование процесса перекосною нагружения работающих в лесной промышленности козловых кранов с целью повышения их надёжности: дисс. .канд. техн. наук/ Голенищев Александр Владимирович.^.,-1986.- 205 с.
- Голенищев А.В. Повышение надёжности козловых кранов/ А. В. Голенищев, В.М.Шевнин//Лесная промышленность, — 1988.- № 1,-С.20−21.
- Голенищев А.В. Грузоподъёмные краны лесопромышленных предприятий, /А.В.Голенищев, Ю. С. Щевелев.- Екатеринбург: Урал. гос. Лесотехн. Ун-т- ООО «УралПИИЛП», -2006. 343с.
- Данилов Г1.С. Некоторые вопросы действительной работы подкрановых путей: дисс. .канд. техн. наук/ Данилов Павел Сергеевич.- Киев,-1971.-180 с.
- Ерофеев Н.И. Портальные краны/ Н. И. Ерофеев.- М.: Морской транспорт,-1962.- 102 с.
- Евдокимов Б.А. Исследование прочности и расчёт конструкций путей строительных башенных кранов/Б.А.Евдокимоа, В. И. Богданов, А. М. Глазов.-М.: Стройиздат.-1980, — 172 с.
- Жермунский Б.И. Перекосы козловых кранов/ Б. И. Жермунский, Л. М. Стёпочкин // Харьковский политех, ин-т.- Харьков., — 1977.- Деп. в
- ЦНИИ ТЭИТЯЖМАШ.- 1977.- № 313.
- Зарецкий А.А. Развитие теории расчёта грузоподъёмных кранов по предельным состояниям: дисс.. д-ра. техн. наук/Зарецкий Александр Алек-санрович.- М.,-1982, — 430 с.
- Зуев В.А. Применение козловых кранов на лесозаготовительных предприятиях/ В. А. Зуев, В. Г. Васильев, А.В.Голенищев// Лесоэксплуатация и ле-сосилав.- М.,-1989.- № 10.- С. 44.
- Иванов В.II. Исследование влияния реального пути и параметров приводных колёс на движение мостового крана: дисс. канд.техн. наук/ Иванов Владимир Николаевич.- Харьков,-1983.- 204 с.
- Инструкция по оценке риска эксплуатации грузоподъёмных кранов, ус тановленных в зданиях и сооружениях.(расчётно-экспериментальный мтод). Проект/ Короткий А. А. и др.- Новочеркаск,-1997.- 19с.
- Инструкция по нивелированию I, II, III и IV классов, М., Недра,-1967.
- Исследование состояния рельсовых путей козловых кранов на лесных складах с разработкой инструкции по их содержанию и эксплуатации: Отчет, но ПИР//Руководитель Тагильцев Н. Д., отв.исп. Салахутдинов Ш. А.
- ГР 0184.37 389- Инв.№ 0285.23 538.- Свердловск,-1984.- 18с.
- Казак С.А. Статистическая динамика и надёжность подъёмно-транспортных машин/ С. А. Казак.- Свердловск: Ср.Урал.из-во,-1987.- 86 с.
- Карпов В.В. Разработка методов определения нагруженности металлоконструкций верхнего строения прегрузочных портальных кранов: дисс. .канд. техн. наук/ Карпов Виктор Владимирович.- Jl.,-1987.- 220 с.
- Комплексное обследование крановых путей грузоподъёмных машин. Общие положения. РД-10−138−97.- М.,-1997.- 38 с.
- Конопля А.С. Вопросы силового взаимодействия крановых ходовых колёс с рельсами: дисс. канд. техн. наук/ Конопля Антон Сергеевич.- Л.,-1969.-242 с.
- Лазарян В.А. Динамика ваюнов устойчивость движения и колебания/ В. А. Лазарян.- М.: Наука, 1964.- 255 с.
- Марготьев A. I1. Оценка прочности балластного слоя и земляного полотна по предельному состоянию/ А.П.Марготьев//Труды ЦПИИМГ1С.- М., — 1970.-Вып. 415.-С 65−74.
- Пейлор Т. Машинные имитационные эксперименты с моделями экономи ческих систем/ Т. Нейлор- пер. с англ. под ред. А. А. Петрова.- М., -1975.- 500 с. 47.11икитин I I. I I. Курс теоретической механики/1 I. I I.11икитин.- М.: Высшая школа,-1990.-607 с.
- Первозванский А.А. Математические модели в управлении производством/ А. А. Первозванский.- М.: Наука, -1975.- 616 с.
- Петров Н.П. Напряжения в рельсах от изгибов в вертикальной плоскости и вероятность определения этих напряжений опытами/ Н. П. Петров.- СПб.: Транспорт, -1906.-107с.
- Правила устройства и безопасной эксплуатации грузоподъёмных кранов.- М.: Металлургия, -1982, — 169 с.
- Правила устройства и безопасной эксплуатации грузоподъёмных кранов: ПБ-10−14−92.- М., -1993.- 235 с.
- Проблемы прогнозирования и оптимизации работы транспорта/ Под ред. Л. В. Канторовича и В. П. Лифшица.- М., -1982.- 327 с.
- Разработать нормы по устройству, эксплуатации и перебазированию рельсовых путей строительных башенных кранов (взамен СП 28−29)// Отчёт, но ПИР// Руководитель Тагильцев П. Д. № ГР 0183.29 692- Инв. № 02 850.24 726.- Свердловск, -1986.- 67 с.
- Реклейтис Г., Рейвиндран А., Рексдел К. Оптимизация в технике/ Г. Рек-Лейтис, А. Рейвиндран, К.Рексдел.: пер. с англ.- М., — 1986. Кн. 1 и 2.-349 и 272с.
- Резников В.Б. Фактические нагрузки на опорно-ходовые части портального крана/ В.Б.Резников//Журнал речной транспорт.- 1961. № 4.- С. 15−18.
- Самарский А.А. Современная прикладная математика и вычислительный эксперимент/А.А.Самарский// Журнал коммунист.- 1983. № 9. С.32−42.
- Салахутдинов Ш. А. Определение нагрузок в элементах опор козловых кранов методом конечных элементо/ Ш. А. Салахутдинов.// Лесоэксплуатация: сб.докл. обл. и-тех. конф, — Свердловск: УГЛТА, 1991.- С. 132.
- Салахутдинов Ш. А. Математическое описание движения крана, но путям лесного склада/ Ш. А.Салахутдинов// Сб.науч.тр. УГЛТА, — Сверд- ловск,-1992.-С.52−55.
- Салахутдинов Ш. А., Чащин Н. И., Воронцова Т. Е. Анализ влияния эксплуатационных параметров рельсового кранового пути на распределение опорной реакции//Транспорт Урала. 2006. № 1(8).с.84−87.
- Салахутдинов Ш. А., Ковалев Р. Н. Методика определения планово- высотою положения крановых рельсовых путей лесных складов//Естесгвенные и технические науки.- 2006. № 2(22).с.215−220.
- Смехов А.А. Математические модели процессов грузовой работы./ А. А. Смехов.-М.: Наука, 1982.- 256 с.
- Справочник по кранам/ Под. ред. М. М. Гохберга. Т. 1−2.- М., Л.: Машиностроение, 1988, — С. 536 и 560.
- СТП 08/1−35−89. Козловые краны, эксплуатируемые на лесопромышленных предприятиях. Выносливость стальных конструкций. Метод расчёта.-Свердловск, 1989.- 26 с.
- Салахутдинов Ш. А. Инструкция по устройству и содержанию рельсовых путей козловых кранов на предприятиях ТПО"Свердлеспром7 Ш.А. Салахутдинов, Н. ДЛ'агильцев, О. Т. Дмитриева, В. А. Дрокин. Свердловск, 1988.- 49 с.
- Салахутдинов Ш. А. Влияние технического состояния рельсового пути на надёжность опор козловогокрана/Ш.А.Салахутдинов, Е. Д. Копнова.//Информа-ционные материалы VIII Всесоюзной школы. Свердловск- УрО АН СССР, -1990.-233 с.
- Тарг С.М. Краткий курс теоретической механики./ С. М. Тарг.- М.: Наука, 1998.-428 с.
- Требования к устройству и безопасной эксплуатации рельсовых путей козловых кранов. РД-10−117−95.- М., 1996.- 105 с.
- Усов С.II. Грузоподъёмные краны на лесных складах./С.П.Усов, А.В.Голенищев// Журнал Безопастность труда в промышленности.- 1987. N" П.-С. 58−59.
- Федотов Г. А. Автоматизированное проектирование автомобильных дорог/Г.А.Федотов.- М.: Энергия, 1986.- 317 с.
- Фомичёв В.Ф. Разработка методики определения динамики нагрузок в металлоконструкциях козловых кранов: автореф дисс. .канд. техн. наук/ Фомичёв Виктор Фёдорович.- М., 1990.- 16 с.
- Фришман М.А. Ещё раз об определении модуля упруюсти подрельсово-го основания./ М. А. Фришман, И. С. Леваков.- М., 1965.вып. 57, с.4−8.
- Шевнин В.М. Моделирование процессов взаимодествия и обоснование рациональных параметров элементов системы «Кран-путь»: автореф. дисс. .канд. техн. наук/ Владимир Михайлович Шевнин.- Екатеринбург, — 1998.- 23 с.
- Scheffler М. Der Ileichlanf von Verladebrucken mit zentralem und getrennten Bruckenfahrantrieb."WissenschaftIiche Zeitschrift der Technischen Universitet Dresden", Heft 2, — 1964.
- Scheffler M. Kraftverteilung und Ileichlanf in Schienenfahrwerken von Kra-nen."Deutsche Hebe und Fordertechnik", № 5,6, 1967.
- Яковлев В.Ф. Геометрические неровности рельсовых нитей//В.Ф.Яков-лев.Тр.ЛИИЖТ, — Л., 1964.- Вып. 222, — С. 59−66.
- Яковлев В.Ф. Исследование сил взаимодействия колеса и рельса с учётом нелинейных односторонних связей и переменных масс/ В.Ф.Яковлев//Тр.ЛИИЖТ, — Л., 1964.- Вып. 233, — С. 46−95.
- Яковлев А.В. Методы математической обработки статистических данных/А.В.Яковлев//Труды ЦНИИМПС, — М., 1955.- Вып. 97, — С. 11−19.
- А.с. № 1 677 004, А1 СССР, В 66 С 9/08. Крановое колесо/ Ш. А. Салахутдинов, М. Д. Воловик, А. Д. Рябцев (СССР).-1991. 2с.
- А.с. № 1 692 927, А1 СССР, В 66 с 9/16. Ограничитель перекоса опор крана/ Ш. А. Салахутдинов, М. Д. Воловик, А. Д. Рябцев (СССР).-1991.- 2с.
- А.с. № 1 773 841, А1 СССР, В 66 В 19/00. Козловой кран/Ш.А.Сала- хут-динов, А. Д. Рябцев (СССР).-1992.- 4с.