Адаптационные методы определения рационального оребрения тонких пластин и пологих оболочек
Столь широкое применение метода конечных элементов при расчете самых различных типов конструкций и сооружений объясняется целым рядом преимуществ, получаемых при использовании этого метода. Конечные элементы, на которые разбивается конструкция, могут быть произвольной формы, но достаточно малых размеровчем больше элементов, тем точнее конечно-элементная модель описывает реальное сооружение… Читать ещё >
Содержание
- ГЛАВА 1. ВАРИАЦИОННЫЕ ПРИНЦИПЫ И АДАПТАЦИОННЫЕ МЕТОДЫ В МЕХАНИКЕ КОНСТРУКТИВНО НЕЛИНЕЙНЫХ СИСТЕМ
- 1. 1. Вариационный принцип Лагранжа. Замечательное свойство потенциальной энергии механической системы
- 1. 2. Вариационный принцип механики конструктивно нелинейных систем при изопериметрическом ограничении на объем материала
- 1. 3. Вариационный принцип механики конструктивно нелинейных систем с ограничениями. Уравнение неразрывности энергии для индивидуального объема среды
- 1. 4. Адаптационные методы определения энергетически равнопрочных систем. Определение нормируемой плотности энергии для изгибаемых тонких пластин
- 1. 5. Определение структуры энергетически равнопрочных тонких пластин. Этапы проектирования рациональных несущих систем
- 1. 6. Определение структуры энергетически равнопрочных тонких пластин при варьировании локальных и глобальных геометрических параметров
- 1. 7. Определение структуры энергетически равнопрочных тонких пластин при варьировании физических параметров
- ГЛАВА 2. НАСЛЕДСТВЕННЫЕ ЗАДАЧИ И БИФУРКАЦИЯ СТРУКТУРЫ ПРИ ОПРЕДЕЛЕНИИ ЭНЕРГЕТИЧЕСКИ РАВНОПРОЧНЫХ ПЛАСТИН
- 2. 1. Алгоритм адаптационного метода решения наследственных задач
- 2. 2. Примеры расчета наследственных задач при варьировании внешних силовых воздействий
- 2. 3. Примеры расчета наследственных задач при кинематических воздействиях
- 2. 4. Примеры расчета наследственных задач при изменении граничных условий
- 2. 5. Бифуркация структуры при определении энергетически равнопрочных систем
- 2. 6. Примеры бифуркации структуры изгибаемых тонких пластин
- 2. 7. Фрактальность форм конструкций как следствие стремления систем к изоэнергетичности
- ГЛАВА 3. РАЦИОНАЛЬНОЕ РАСПРЕДЕЛЕНИЕ МАТЕРИАЛА В ТОНКИХ ПОЛОГИХ ОБОЛОЧКАХ
- 3. 1. Основные соотношения тонких пологих оболочек
- 3. 2. Предельное состояние тонких пологих оболочек и пластин
- 3. 3. Бифуркация структуры пологих оболочек при варьировании глобальных и локальных геометрических параметров
- 3. 4. Рациональное оребрение пологих оболочек с отверстиями
- ГЛАВА 4. КОНЦЕПЦИЯ И СТРУКТУРА ПРОГРАММНО-ВЫЧИСЛИТЕЛЬНОГО КОМПЛЕКСА «АДАПТАЦИЯ»
- 4. 1. Специфика современных вычислительных комплексов. Особенности объектно-ориентированного программирования
- 4. 2. Вычислительный комплекс «Адаптация». Программный модуль адаптационных расчетов изгибаемых тонких пластин
- 4. 3. Вычислительный комплекс «Адаптация». Программный модуль адаптационных расчетов пологих оболочек
Адаптационные методы определения рационального оребрения тонких пластин и пологих оболочек (реферат, курсовая, диплом, контрольная)
В настоящее время можно считать общеизвестным, что проблема оптимизации является одной из центральных в науке и технике. Методы оптимизации эффективно применяются в самых различных областях человеческой деятельности. Действительно, какую бы задачу не решал современный инженер, он всегда пытается получить наилучший или, как принято называть, оптимальный ответ.
Оптимизация конструкций — перспективное и интенсивно развивающееся направление механики. Исследования в этой области направлены на создание легких, прочных и экономичных строительных конструкций и сооружений, определяя, таким образом, их важное прикладное значение. Проблемы оптимального проектирования, несомненно, имеют и теоретическое значение. В наиболее общем смысле теория оптимизации представляет собой совокупность фундаментальных математических результатов и численных методов, ориентированных на нахождение наилучших вариантов из множества альтернатив. В настоящее время представляет интерес выделение и исследование новых классов математических задач в этой области, учет при оптимальном проектировании различных физических факторов, разработка эффективных методов оптимизации, учитывающих специфику рассматриваемых задач.
История развития оптимального проектирования. Исследования в области оптимизации строительных конструкций восходят к классической работе Г. Галилея (1638 г), посвященной проектированию равнопрочных балок [119]. Рассматривался случай изгиба консольной балки под действием сосредоточенной силы, приложенной к свободному концу. Было показано, что условие равнопрочности выполняется, если высота балки меняется по параболическому закону. Впоследствии было решено значительное число задач, относящихся к оптимизации балок при изгибе, кручении, учете собственного веса и других факторов [1, 10, 16, 49, 96, 97, 113, 128, 132]. Тем не менее, в большей части современных исследований по оптимальному проектированию используется модель балки. Это связано с тем, что уравнения изгиба балок являются одними из простейших и удобны для рассмотрения новых постановок задач, сравнения различных алгоритмов и методик.
Задачи отыскания устойчивости упругих стержней относится также к числу классических проблем оптимального проектирования. Впервые задача отыскания оптимальной формы сжатого стержня (колонны), обладающего минимальным весом и выдерживающего без потери устойчивости заданную нагрузку была поставлена Ж. Лагранжем (1780 г). Полученное им решение [125] оказалось ошибочнымоптимальная форма упруго сжатого стержня была найдена Т. Клаузеном [116] и впоследствии уточнена Е. Николаи [71]. В проведенных исследованиях по данной проблематике [9, 101, 122, 123, 134, 135] было показано, что при оптимизации достигается значительный эффект, и тем самым была обоснована перспектива дальнейших разработок в этом направлении. Некоторые вопросы оптимизации устойчивости упругих арок и круглых пластинок рассмотрены в [115, 118, 136].
Существенное развитие теория оптимального проектирования получила в период бурного строительством железных дорог, и связано это было с вопросами проектирования ферм наименьшего веса. В одной из работ B. JL Кирпичева (1902 г) была обнаружена связь между деформациями и объемом статически неопределимой фермы [53]. Почти одновременно на связь вопросов экономии материала и потенциальной энергии обратил внимание Митчелл (1904 г), положив тем самым начало применения энергетического метода при решении вопросов о минимальном весе конструкций [129]. Дальнейшее развитие энергетического направления связано с именами И. М. Рабиновича, А. И. Кефели и др.- вопросам проектирования оптимальных стержневых систем наименьшего веса посвящено значительное число работ [38, 52, 78−80, 94].
В задачах оптимизации балок и колонн, изложенных выше, в качестве искомой управляющей функции рассматривалось распределение толщин при фиксированном положении осевых линий (недеформирован-ное состояние). Однако существенный интерес представляли задачи нахождения самой формы осевой линии из условия экстремума некоторых жесткостных или прочностных характеристик, например, определение оптимальной формы криволинейного упругого стержня [8]. В связи с исследованием ветвей растений как упругих систем, ставились задачи об оптимальной конфигурации ветвящихся стержневых систем, обладающих минимальным весом при заданных ограничениях по прочности [102].
Интерес к исследованиям в области оптимального проектирования значительно усилился в связи с быстрым развитием судостроения, точного машиностроения, авиационной и космической техники. Известно, что наличие температурных и предварительных напряжений существенно влияет на прочностные и жесткостные характеристики конструктивных элементов, поэтому возрос интерес к рассмотрению задач оптимизации с учетом этих факторов [20, 91, 121, 130].
Значительное число работ посвящено рассмотрению задач оптимизации упругих пластин при изгибе, причем в качестве искомых функций рассматривалось распределение толщин. Исследования проводились как для вопросов минимизации максимального прогиба упругой пластинки, так и для определения форм максимально прочных пластинок при различных условиях опирания [7, 12−15, 51].
Ряд исследований, выполненных в теории оптимального проектирования, посвящен вопросам многоцелевой оптимизации [45, 90, 110, 127], а также проектированию оптимальных конструкций из неоднородных материалов [6, 21, 23, 70, 73, 124].
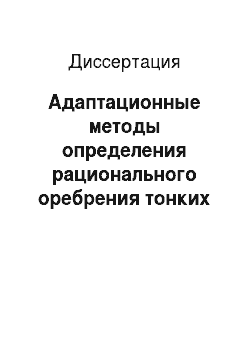
Структура оптимизационных задач. Оптимизация проекта — это главная цель, по существу, каждого инженера, который стремится создать отдельный элемент, устройство или систему для удовлетворения определенным потребностям. Теория оптимизации находит эффективное применение во всех направлениях инженерной деятельности, однако при рассмотрении приложений методов оптимизации при проектировании и анализе функционирования систем следует иметь в виду, что оптимизация — всего лишь один этап в процессе формирования оптимального проекта или условий эффективного функционирования системы [83]. Вообще говоря, указанный процесс, как показано на рис. 1, является циклическим и включает синтез (определение) структуры системы, построение модели, оптимизацию параметров модели и анализ полученного решения. При этом оптимальный проект или новый план функционирования системы строится на основе решения серии оптимизационных задач, способствующего дальнейшему совершенствованию структуры системы. Несмотря на то, что методы теории оптимизации отличаются универсальностью, их успешное применение в значительной степени зависит от профессиональной подготовки инженера, который должен иметь четкое представление о специфических особенностях изучаемой системы.
Рис. 1
Несмотря на то, что оптимизационные задачи могут относиться к совершенно разным областям инженерной практики и представлять различные системы, они обладают достаточно общей структурой. Все эти задачи можно классифицировать как задачи минимизации (или максимизации) вещественнозначной функции Дх)-мерного векторного аргумента х = (х,, х2), компоненты которого удовлетворяют системе уравнений Ик (х) = 0, набору неравенств > 0, а также ограничены сверху и снизу, т. е. х{и) > х> х-1). В последующем изложении функцию /(х) будем называть целевой функцией, уравнения И^х) = 0 — ограничениями в виде равенств, неравенства > 0 — ограничениями в виде неравенств. При этом предполагается, что фигурирующие в задаче функции являются вещественнозначными, а число ограничений конечно.
Задача общего вида формулируется следующим образом: минимизировать Дх) при ограничениях: = О, ?= 1, ., К- #/х)>0, у =1, .,./- хи)>х1>х1 1= 1, и называется задачей оптимизации с ограничениями или задачей условной оптимизации. Задача, в которой нет ограничений, т. е.
Ои называется оптимизационной задачей без ограничений или задачей безусловной оптимизации.
Задачи оптимизации можно классифицировать в соответствии с видом функций/ Иь и размерностью вектора х. Задачи без ограничений, в которых х представляет собой одномерный вектор, называются задачами с одной переменной и составляют простейший, но вместе с тем весьма важный подкласс оптимизационных задач. Задачи условной оптимизации, в которых функции Нк и gj являются линейными, носят название задач с линейными ограничениями. В таких задачах целевые функции могут быть либо линейными, либо нелинейными. Задачи, которые содержат только линейные функции вектора непрерывных переменных х, называются задачами линейного программирования', в задачах целочисленного программирования компоненты вектора х должны принимать только целые значения.
Задачи с нелинейной целевой функцией и линейными ограничениями иногда называют задачами нелинейного программирования с линейными ограничениями. Оптимизационные задачи такого рода можно классифицировать на основе структурных особенностей нелинейных целевых функций. Если /(х) — квадратичная функция, то мы имеем дело с задачей квадратичного программированияесли /[х) есть отношение линейных функций, то соответствующая задача носит название задачи дробно-линейного программирования, и т. д. Деление оптимизационных задач на эти классы представляет значительный интерес, поскольку специфические особенности тех или иных задач играют важную роль при разработке методов их решения. Далее рассмотрим методы, которые можно использовать для решения таких задач.
Математические методы оптимизации. В общем смысле теория оптимизации представляет собой совокупность фундаментальных математических результатов и численных методов, ориентированных на нахождение и идентификацию наилучших вариантов из множества альтернатив и позволяющих избежать полного перебора и оценивания возможных вариантов. Эффективность оптимизационных методов тесно связана с широким использованием достижений в области математики путем реализации итеративных вычислительных схем, опирающихся на строго обоснованные логические процедуры и алгоритмы на базе применения вычислительной техники. и
1. Линейное программирование (ЛП). Задачами линейного программирования называются оптимизационные задачи, в которых ограничения представляются в виде равенств (неравенств) и целевая функция линейна.
Задача ЛП в стандартной форме с т ограничениями и п переменными имеет следующий вид: минимизировать или максимизировать
Z = сххх +с2×2 +. + спхп (1) при ограничениях N 6,.- ху>0, (2)
7=1 где а-, Ъу и с, — константы- / = 1, 2,., т. В выражении (1) всего т ограничений, часть из которых являются ограничениями-неравенствами со знаком < или >, а часть — ограничениями в виде равенств.
Известен классический метод решения систем линейных уравнений, называемый методом Гаусса-Жордана, идея которого состоит в сведении системы т уравнений с п неизвестными к каноническому или ступенчатому виду при помощи элементарных операций по строкам.
Однако наиболее эффективными при решении задач ЛП являются симплекс-метод и метод наискорейшего спуска.
Симплекс-метод разработан Дж. Данцигом (1946 г). Он представляет собой итеративную процедуру решения задач ЛП, записанных в стандартной форме. При этом требуется, чтобы система ограничений-равенств была приведена к каноническому виду, что дает возможность легко находить базисное решение. Алгоритм симплекс-метода включает следующие основные шаги [82]:
1. Выбор начального допустимого базисного решения.
2. Переход от начального решения к другому допустимому базисному решению с лучшим значением целевой функции. На этом шаге исключаются из рассмотрения все допустимые базисные решения, которые хуже текущего решения.
3. Продолжение поиска допустимых базисных решений, улучшающих значение целевой функции. Если некоторое допустимое базисное решение нельзя улучшить, оно является оптимальным, и алгоритм симплекс-метода завершает свою работу.
Согласно методу наискорейшего спуска, который также относится к итеративным процедурам, поиск оптимального решения начинается с допустимого решения и продолжается в направлении вектор-градиента целевой функции до тех пор, пока не будет достигнута точка границы допустимой области. В этой точке направление поиска меняется в соответствии с определенными правилами, изложенными в [60]. Применение метода наискорейшего спуска требует больше вычислений для каждой итерации по сравнению с симплекс-методом. С другой стороны, методом наискорейшего спуска оптимальное решение можно получить за меньшее число итераций, т.к. этот метод позволяет двигаться внутри допустимой области, в то время как в симплекс-методе движение осуществляется от одного узла границы допустимой области к другому, соседнему.
Частным случаем линейного программирования является целочисленное программирование. В задаче линейного программирования предполагается, что внутри допустимой области переменные могут изменяться непрерывно. Однако на практике часто встречаются случаи, когда на переменные наложено требование, чтобы они принимали дискретный ряд значений. Задача целочисленного линейного программирования (ЦЛП) является задачей линейного программирования (ЛП), в которой ограничения и целевая функция линейны, но переменные в окончательном решении должны принимать целые значения. Задачу ЦЛП можно решить, например, как задачу ЛП без учета условий целочисленности переменных, а затем округлить полученное решение с избытком или недостатком, что позволит получить целочисленное решение. Использование такого подхода требует проверки допустимости полученного решения. В качестве наиболее широко используемого метода решения задач ЦЛП используется метод ветвей и границ [83]. По существу он представляет собой эффективную процедуру перебора всех целочисленных решений.
Задачи оптимального проектирования, в которых целевая функция квадратична, а функции, задающие ограничения, линейны по переменным проектирования, называются задачами квадратичного программирования. В силу того, что симплекс-метод, используемый для решения задач ЛП, после незначительных модификаций применим к задачам квадратичного программирования [100], последние рассмотрены в этом разделе. По вопросам ЛП, а также методам их решения имеется обширная литература [44, 46, 48, 68, 93, 108, 109, 120, 126].
2. Нелинейное программирование (НП). Большинство встречающихся на практике задач являются задачами нелинейного программирования, решать которые гораздо сложнее. Задачи программирования становятся нелинейными, когда в них появляются произведения, обратные величины или высшие порядки нескольких или всех переменных. Иногда можно упростить нелинейную задачу, делая ряд приближенных допущений, так, чтобы она формулировалась в линейной постановке. Однако это приближение неприемлемо для реальных задач и часто не отражает ее важных особенностей.
Задачи НП нельзя решать непосредственно симплекс-методомметод наискорейшего спуска, представленный для задач линейного программирования, применим только к задачам с линейными ограничениями и линейной целевой функцией. В случае нелинейных ограничений и нелинейной целевой функции в результате решения возникает другая задача нелинейного программирования. Однако оба этих метода могут быть использованы для решения задач НП с помощью итерационных процессов. В этом случае задача сначала линеаризуется для небольшого интервала так, что новое решение получается из результатов предыдущего.
Наиболее распространенными методами линеаризации нелинейной функции являются метод секущей плоскости и метод кусочно-линейной аппроксимации. Рассмотрим эти методы подробнее [60].
Метод секущей плоскости позволяет решать задачу НП с помощью предварительной линеаризации нелинейной функции путем удержания первых двух членов ряда Тейлора. По известному значению Дх0) функции нескольких переменных {*} = {х0} приближенное значение функции ДхО при {х} = {*]} по формуле Тейлора определяется следующим образом: = Я*0) +)({*! } «{*0 }) > где под выражением V/(дг0) подразумевается вектор-строка следующего вида: д//сЬс, 0, д[/3*2,0» —Ж/3*и, о («число переменных). Рассмотрим задачу НП о максимизации функции
Ах) (3) при ограничениях:) <0, >0, где /=1,2, ., т.
Линейную аппроксимацию этой задачи в произвольной точке {х0} можно осуществить удержанием первых двух членов ряда Тейлора, т. е. привести задачу к виду: максимизировать г = /(*о)+УАдг0Х{*, Ы*о}) (5) при ограничениях:
0) + X {М*о}) где значение каждой функции в точке {х} = {*0} известно. Задача теперь линейна, причем {дг} = } - неизвестные величины. Как только эта задача линейного программирования будет решена, весь процесс можно повторить для получения нового решения {х2}, подставив {л^} вместо {х0}.
4)
6)
Метод кусочно-линейной аппроксимации позволяет решать задачу НП, предварительно заменив нелинейную функцию переменной множеством прямых, тем самым преобразовав задачу к линейной.
Для задачи нелинейного программирования при ограничениях
7=1 и целевой функции ху >0
7)
Х/ДхД (8)
7=1 где ]= 1,2,п и / = 1, 2,., т, предполагается, что каждая переменная х имеет верхнюю границу му. Расстояние между началом координат и ц можно разделить на ^ отрезков + 1)-ми точками так, что х0 ]= 0 < х{ ] < хк+и ^ - ^ иг Разбиение выполняется таким образом, чтобы кусочно-линейные функции представляли функции g? j (х.) и fj (Xj) достаточно точно. Используя алгоритм кусочно-линейной аппроксимации [60], исходная задача НП (7) и (8) приводится к виду:
7=1к=0 при = 1, (3^ > 0 для любых к и у. 0
Эта задача ЛП дает приближенное решение исходной задачи НП. Степень аппроксимации можно улучшить, увеличивая число отрезков, на которые разбивается область изменения каждой переменной.
К численным методам решения задач НП относятся алгоритмы двух видов, представляющие собой различные способы организации поиска условного экстремума. Это методы спуска, представленные в виде метода проекции градиента и метода возможных направлений, а также методы штрафных функций — внутренних и внешних [68].
Трудность решения задач НП обусловлена рядом факторов. Во-первых, при нелинейных ограничениях область допустимых значений может не быть выпуклой или даже состоять из ряда несвязанных областей. Во-вторых, процедура решения обычно позволяет выделить экстремум, но не дает гарантии, что этот экстремум глобальный. Эти и ряд других обстоятельств приводят к тому, что нелинейную задачу удается решить не всегда или же довольствоваться приближенным решением. Подробнее вопросы НП рассмотрены в работах [95, 99].
3. Геометрическое программирование (ГП). Задачами геометрического программирования называются задачи условной оптимизации, в которых левые части ограничений и целевая функция являются полиномиальными функциями специального вида. Геометрическое программирование, основы которого были разработаны Зенером (1961 г), в конце прошлого века получило значительное теоретическое развитие.
ГП минимизирует нелинейную целевую функцию, имеющую форму полинома, при удовлетворении М нелинейных ограничений, также имеющих форму полиномов. Для Т членов целевая функция имеет вид: т z = 2>y //(*)> (Ц)
У=1 где су — положительные константы, а функции fj (х) имеют вид (12) Всего в задаче N переменных х1, каждая из которых возводится в степень а^, причем а^- константы.
Когда целевая функция минимальна (или максимальна), ее частные производные первого порядка обращаются в нуль, т. е.
1 т
Е^су/у (х*) = 0' (13) dxk хк j где хкпеременная (к — 1, 2,., N).
Вместо решения нелинейных уравнений (13) можно по [111] найти наилучшее разложение оптимального значения целевой функции 2* на слагаемые. Оптимальный весовой коэффициент щ для у'-го слагаемого есть отношение этого слагаемого к значению целевой функции, т. е.
14) а сумма весовых коэффициентов равна единице, т. е. т
Ш! + тз2 + =1. (15)
7=1
Это соотношение известно как условие нормировки целевой функции. Из уравнений (13) и (14) получаем т
5Л-®у=0' (16)
7=1 где к= 1, 2N. Всего в (16) содержится N линейных уравнений, по одному для каждой переменной. Эти уравнения называются условиями ортогональности переменных.
Теперь можно решать систему линейных уравнений (15) и (16) относительно переменных щ. Переменные тпь называются двойственными переменными. Основная идея геометрического программирования состоит в том, что решить двойственную задачу, определенную уравнениями (15) и (16), легче, чем решать исходную основную задачу.
Если получены значения двойственных переменных щ, то можно найти значение целевой функции. Это следует из условия нормировки (15), а также уравнений (12) и (16), из которых получаем экстремальное значение целевой функции в виде Л®-' СmJJ
17) тах «П
7=1
Наконец, если приравнять каждое у'-е слагаемое целевой функции произведению • ¦шJ, то можно определить значение каждой переменной X] в экстремальном решении, что следует непосредственно из (14).
Геометрическое программирование (ГП) эффективно, когда степень сложности задачи равна нулю, например, когда в задаче содержится больше слагаемых, чем переменных. Относительно легко могут быть также решены задачи со степенью сложности, равной единице. Однако для большинства задач проектирования конструкций степень сложности превышает единицу и ГП не столь эффективно. Подробнее вопросы ГП и его приложения описаны в монографиях [60, 83, 111, 117, 133].
4. Динамическое программирование (ЦП). В инженерной практике процесс проектирования часто разбивают на ряд этапов. На каждом этапе принимается ряд решений, которые в свою очередь влияют на процесс проектирования на следующем этапе, а результаты, полученные на одном этапе, используются на последующих этапах. Динамическое программирование представляет собой способ систематизации такой многошаговой процедуры. Оптимизация проекта проводится на каждом этапе, и при этом окончательный проект является результатом совокупного процесса оптимизации.
В основе метода ДП лежит принцип оптимальности, сформулированный американским ученым Р. Беллманом [18] для широкого круга систем следующим образом: оптимальная стратегия обладает тем свойством, что каковы бы ни были начальное состояние и начальное решение, последующие решения должны составлять оптимальную стратегию лишь относительно состояния, рассматриваемого в данный момент времени. Другими словами, оптимальная стратегия не зависит от «предыстории» системы и определяется ее состоянием в данный момент времени.
Рассмотрим некоторую физическую систему, которая с течением времени может менять свое состояние. Пусть в любой момент времени ей соответствует некоторый вектор состояния S. Обычно вектор S является многомерным, состоящим из конечного набора величин Su S^,.-, Sn, называемых переменными состояния. Предполагается, что система переходит из одного состояния в другое под воздействием ряда мероприятий, называемых вектором управления ?/. Вектор управления следует выбирать так, чтобы состояние 5 изменялось некоторым заранее определенным образом. С процессом изменения состояния системы обычно связана некоторая оценка, выраженная численно с помощью критерия который зависит от состояния системы и от принятого управления — () = () (5, Ц). Для постановки задачи оптимизации необходимо учесть условия, накладываемые на начальное и конечное состояния системы.
В общем виде задача оптимального управления формулируется следующим образом: из множества возможных управлений и найти такое управление (У, которое переводит систему из начального состояния в конечное так, чтобы критерий Q = Q{S, Ц) принимал свое максимальное значение. Специфика метода динамического программирования заключается в том, что для отыскания оптимального управления процесс разделяется на ряд последовательных этапов. Выбор управления на каждом шаге должен производиться в интересах процесса в целом.
Сформулируем общее правило формирования управления: в процессе многошагового планирования управление на каждом шаге должно приниматься с учетом будущего. Последний шаг, единственный из всех, нужно планировать так, чтобы он приносил наибольшее приращение критерия Спланировав его оптимальным образом, можно переходить к предпоследнему и т. д. Поэтому процесс динамического программирования удобно разворачивать от конца процесса к началу.
Оптимальное управление на последнем шаге заключается в том, чтобы для любого из возможных состояний на предпоследнем шаге выбрать такое управление, которое бы переводило систему в конечное состояние и при этом позволяло бы получить максимум приращения функции Для планирования на последнем //-ом шаге необходимо сделать всевозможные предположения о том, чем закончился предпоследний {И- 1)-й шаг, и для каждого из них выбрать управление на последнем.
ДП позволяет решать непрерывные и дискретные нелинейные задачионо рекомендуется в качестве систематического метода решения еще и потому, что проектировщик может дать физическую интерпретацию его этапам. При использовании ДП могут встретится трудности двух видов: первая, характерная для практических задач, заключается в том, что требуется большой объем машинной памятивторая — в сложности формулировки задач в пригодном для динамического программирования виде. Если в задаче содержится большое число ограничений, то применение метода сопряжено со значительными сложностями. Принципы ДП и его особенности изложены в [17, 36, 75, 112].
Стратегия оптимизационного исследования. Оптимизационное исследование включает в себя не только знание и применение современных оптимизационных алгоритмов — это необходимое, но отнюдь не достаточное условие успешного проведения оптимизационного исследования. Прежде всего, необходимо правильно сформулировать оптимизационную задачу и подготовить ее к решениювыбрать подходящий алгоритм, а также выбрать или написать эффективную программную реализацию этого алгоритмапровести ряд оптимизационных расчетов, включающих различные корректировки задачи и алгоритманаконец, получив надежное решение, проинтерпретировать его в терминах реальной системы и использовать на практике.
Сформулируем некоторые принципы проведения оптимизационного исследования и дадим их краткую характеристику.
1. Постановка задачи. Для того чтобы использовать математические результаты и численные методы теории оптимизации для решения конкретных инженерных задач, необходимо установить границы подлежащей оптимизации инженерной системы, определить количественный критерий, на основе которого можно произвести анализ вариантов с целью выявления «наилучшего», осуществить выбор внутрисистемных переменных, которые используются для определения характеристик и идентификации вариантов. Эта последовательность действий составляет содержание процесса постановки задачи инженерной оптимизации.
Приступая к оптимизационному исследованию, важно четко определить границы изучаемой системы. В данном контексте система предстает как некоторая изолированная часть реального мира. Границы системы задаются пределами, отделяющими систему от внешней среды, и служат для выделения системы из ее окружения. При проведении анализа обычно предполагается, что взаимосвязи между системой и внешней средой зафиксированы на некотором выбранном уровне представления. Тем не менее, поскольку такие взаимосвязи всегда существуют, определение границ системы является первым шагом в процессе приближенного описания реальной системы.
Если подлежащая исследованию система определена и ее границы установлены, то на следующем этапе постановки задачи оптимизации необходимо осуществить выбор критерия, на основе которого можно оценить характеристики системы или ее проекта. Независимо от того, какой критерий выбирается при оптимизации, «наилучшему» варианту всегда соответствует минимальное или максимальное значение характеристического показателя качества функционирования системы. Один из путей учета совокупности противоречивых целевых установок состоит в том, что какой-либо из критериев выбирается в качестве первичного и используется при оптимизации как характеристический критерий. Остальные критерии считаются вторичными и порождают ограничения оптимизационной задачи, которые устанавливают диапазоны изменений соответствующих показателей от минимального до максимального значения.
На третьем основном этапе постановки задачи оптимизации осуществляется выбор независимых переменных, которые должны адекватно описывать допустимые проекты или условия функционирования системы. В процессе выбора независимых переменных следует принять во внимание ряд важных обстоятельств. Во-первых, необходимо провести различие между переменными, значения которых могут изменяться в достаточно широком диапазоне, и переменными, значения которых фиксированы и определяются внешними факторами. Во-вторых, при постановке задачи следует учитывать все основные переменные, которые влияют на функционировании системы или качество проекта. В-третьих, еще одним существенным фактором, влияющим на выбор переменных, является уровень детализации при исследовании системыочень важно ввести в рассмотрение все основные независимые переменные, но не менее важно не «перегружать» задачу большим количеством мелких, несущественных деталей.
2. Построение модели. После того как определены границы системы, характеристический критерий и независимые переменные выбраны, на следующем этапе необходимо построить модель, которая описывает взаимосвязи между переменными задачи и отражает влияние независимых переменных на степень достижения цели, определяемой характеристическим критерием. Описание и построение модели системы — важнейший этап оптимизационного исследования, определяющий практическую ценность получаемого решения и возможность его реализации. Процесс оптимизации с использованием модели можно рассматривать как метод отыскания оптимального решения для реальной системы без непосредственного экспериментирования с самой системой.
В оптимизационных исследованиях обычно используются модели трех основных типов [83]: 1) аналитические модели, 2) модели поверхности отклика, 3) имитационные модели.
Аналитическая модель включает уравнения материального и энергетического баланса, соотношения между проектными техническими характеристиками и уравнения, описывающие физические свойства. Эта совокупность уравнений представляет собой систему зависимостей, описывающих поведение системы. Для использования математических методов оптимизации, описанных выше, функции в уравнениях должны принимать вещественные значения, которые можно вычислить для выбранных значений независимых переменных. В принципе уравнения могут содержать интегральные или дифференциальные операторы. Однако на практике лучше всего заменить их квадратурными формулами или аппроксимировать, чтобы иметь в модели только алгебраические функции. Обычно такие модели достоверны для более широких условий работы системы, чем модели поверхности отклика.
В модели поверхности отклика вся система или входящие в нее части состоят из аппроксимирующих уравнений выбранного вида, коэффициенты которых определяются на основе полученной информации о работе системы. К типичным аппроксимирующим уравнениям относятся линейные уравнения связи и уравнения с квадратичными функциями. Модели такого типа используются обычно в тех случаях, когда отклик системы непредсказуем или слишком сложен, что делает невозможным создание детализированной модели исходя из технических принципов. Поскольку переменные взаимозависимы, модели поверхности отклика обычно надежны только в ограниченной области значений переменных системы. Однако их преимуществом является упрощенная структура.
В имитационных моделях основные уравнения, описывающие поведение системы, группируются в отдельные модули или подпрограммы. Они описывают работу отдельных частей или реакцию системы на изменение ее состояния. Каждый из этих модулей или подпрограмм независим от других и содержит внутренние вычислительные процедуры, такие, как решение уравнений, интегрирование или процедуры логического разветвления. Имитационные модели обычно используются в тех случаях, когда трудно решать уравнения с неявно заданными переменными, когда от состояния системы зависит выбор алгоритма вычислительной процедуры или соответствующих уравнений, а также при введении в систему случайных возмущений. Модели этого типа обычно сложнее моделей двух описанных выше типов и, как правило, при их использовании нужны значительно большие вычислительные мощности.
В большинстве случаев выбор типа модели определяется качеством имеющийся информации о системе, степенью понимания того, что происходит с системой, и зависит от сложности самой системы.
3. Реализация модели. Независимо от выбранного типа модели исследователь должен сделать выбор, каким образом реализовать модель и в какой форме записать ее, какие средства использовать для подготовки оптимизационной задачи к решению, какой стратегии счета придерживаться при решении. Эффективность исследования в целом, а также время подготовки к проведению этой работы существенно зависят от правильности подхода к этим проблемам, и поэтому они являются важными составными частями оптимизационного исследования.
Модель для оптимизационного исследования можно записать в явном виде, а затем запрограммировать для вычисления значений функций и производных. Модель можно также генерировать с помощью ЭВМ, используя средства вычислительной техники различной сложности. При решении большей части технических прикладных задач, как правило, используются разработанные самими исследователями аналитические или специальные имитационные модели. Автоматическое генерирование аналитических моделей обычно используется только для моделей линейного или частично целочисленного программирования. Модели поверхности отклика чаще всего используются совместно со сложными имитационными моделями, чтобы избежать непосредственной оптимизации имитационных моделей.
После того как модель построена и выбран способ ее представления, следует подготовить задачу для решения с помощью подходящего оптимизационного алгоритма. Подготовка задачи к решению обычно включает три этапа [83]:
1. Модификация модели с целью преодоления вычислительных трудностей.
2. Преобразование модели для повышения эффективности решения.
3. Анализ модели с целью нахождения возможных признаков решения задачи.
При проведении этих этапов необходимо рассмотреть вопросы, связанные с масштабированием задачи (в результате масштабирования осуществляется переход к относительным значениям величин, используемых в оптимизационной модели), преобразованием функций и переменных, исключением избыточных ограничений и последовательной подстановкой переменных в ограничения.
4. Оценка решения. Оптимизационное исследование не заканчивается получением решения задачи. Напротив, самая важная часть исследования заключается в обосновании правильности решения и его анализе чувствительности.
Первое, что необходимо сделать при исследовании результатов оптимизационных расчетов — установить, обосновано ли полученное решение. Считается, что решение обосновано, если ему соответствует некоторое реализуемое состояние рассматриваемой системы и оно является ее оптимумом. Реализуемое состояние — это одно из возможных состояний системы. Как правило, если модель достаточно точно отражает поведение системы, она содержит необходимые ограничения и границы. Однако все модели верны лишь в определенных пределах, а все зависимости справедливы в некоторых границах. Таким образом, необходимо проверить, не выходит ли полученное решение за границы достоверности модели. После того как показано, что решение реализуемо, требуется установить, является ли оно оптимальным решением. Речь идет не о математическом доказательстве выполнения необходимых и достаточных условий критерия оптимальности, а об интерпретации полученного результата и о понимании того, почему решение оптимально. Рекомендуемая общая методология обоснования правильности решения оптимизационной задачи состоит в следующем:
1. Упростить модель так, чтобы можно было использовать простые алгебраические методы.
2. Получить из вспомогательной модели оптимальное решение как функцию главных переменных модели.
3. С помощью вспомогательной модели построить ряд прогнозов и проверить их на полной модели.
4. Если оптимизационные расчеты подтверждают тренды, полученные из вспомогательной модели — решение является верным.
Результатом исследований такого рода является не только решение задачи, но и понимание физического смысла полученного решения.
На следующем этапе оценки решения определяется его чувствительность к изменениям параметров модели или исходных данных. Основными целями детального анализа чувствительности являются [83]:
1. Отыскание параметров, оказывающих наибольшее влияние на оптимальное решение.
2. Уточнение данных о дополнениях или модификации системы с целью улучшения показателей ее работы.
3. Определение влияния на систему вариаций неточно заданных параметров.
4. Выяснение возможной реакции системы на неуправляемые внешние воздействия.
Поскольку информация такого рода очень важна для практической реализации решения, детальный анализ чувствительности оказывается во многих случаях полезнее самого оптимального решения. Анализ чувствительности проводится двумя способами: с помощью множителей Ла-гранжа или методом параметрического исследования.
Использование ЭВМ и метода конечных элементов в оптимизационных расчетах. В настоящее время большая часть исследований по оптимизации упругих тел выполняется с использованием мощных ЭВМ. В связи с этим значительное число работ посвящено разработке вычислительных алгоритмов, предназначенных для решения определенных классов задач оптимального проектирования. Основы для создания подобных алгоритмов содержатся в методах математического программирования, в теории оптимального управления [22, 55, 56, 76, 104], вариационном исчислении и численных методах оптимизации [67, 69, 103, 107].
При формулировке и решении задач оптимального проектирования используются два основных подхода: континуальный и дискретный. Континуальный подход основан на непрерывном пространственном описании конструкций. При этом функции состояния (перемещения, деформации, напряжения) и переменные проектирования представляются как функции координат. В качестве оптимизируемых критериев принимаются интегральные и локальные функционалы, зависящие от функций состояния и переменных проектирования. Механические характеристики конструкций, на значения которых наложены ограничения, иногда для удобства также записываются в виде функционалов от переменных состояния и проектирования. Кроме того, на переменные проектирования накладываются ограничения, выражающие требования технологии и адекватности принятой модели описания конструкции. От переменных проектирования могут зависеть коэффициенты уравнений, описывающих поведение конструкции, а также форма занимаемой конструкцией области пространства и т. д. Решение прямых задач расчета напряженно-деформированного состояния позволяет находить переменные состояния при фиксированных управляющих функциях и затем вычислять требуемые механические характеристики элемента конструкции. Исследование вопросов оптимального проектирования проводится с применением методов оптимизации систем с распределенными параметрами и вариационного вычисления. Отыскание переменных проектирования сводится к решению краевых задач для системы уравнений состояния, сопряженных уравнений и условий оптимальности.
Дискретный подход основан на конечномерном описании конструкции, т. е. представлении ее в виде конечного числа взаимосвязанных элементов. Переменные состояния аппроксимируются выражениями, зависящими от набора неизвестных параметров. Эти параметры находятся из решения матричных уравнений состояния. Матричные уравнения обычно получаются при помощи стандартных процедур метода конечных элементов или непосредственной дискретизацией дифференциальных уравнений. Переменные проектирования, в свою очередь, выражаются при помощи конечного набора параметров, от которых зависит величина функции цели. Функция цели представляет собой конечномерный аналог функционала качества. Определение значений параметров проектирования, доставляющих экстремум функции цели, осуществляется методами математического программирования.
К преимуществам континуального подхода следует отнести возможности использования дифференциальных уравнений механики деформированного твердого тела и получения точных аналитических решений, рассматриваемых в качестве эталонных при применении численных методов, широкую механическую интерпретацию получаемых результатов. Континуальные методы позволяют проводить качественный анализ проектов и представлять оптимальные решения в удобной аналитической форме. С другой стороны, дискретный подход, ориентированный на вычисление с помощью ЭВМ, при существующих развитых численных методах позволяет получать решения задач высокой размерности.
Большинство методов расчета нелинейных пластин и оболочек можно разделить на две основные группы. Первую составляют методы приближенного решения краевых задач для дифференциальных уравнений. К этой группе относятся такие широко известные методы, как метод конечных разностей, метод Бубнова-Галеркина, метод Канторовича-Власова и др. [4, 5, 40, 85]. Ко второй группе относятся прямые методы, используя которые, минуя дифференциальные уравнения, на основе вариационных принципов механики строятся процедуры для нахождения числовых полей неизвестных функций в среде [2, 3, 19, 24, 33, 42, 54, 86].
Анализ литературных источников показывает, что среди численных методов расчета пространственных конструкций, определяющее положение занимает метод конечных элементов (МКЭ), разработанный в середине прошлого столетия. Такая популярность метода, несомненно, объясняется простотой его физической интерпретации, математической сути и гибкостью алгоритма. В настоящей работе применяется метод конечных элементов в форме метода Ритца, разработанный Курантом [57]. По обоснованию и применению метода конечных элементов имеется обширная литература [4, 5, 50, 58, 66, 72, 74, 77, 87, 89, 92, 105, 106], предложено множество различных типов конечных элементов [25, 26, 37, 47, 88, 114, 131].
Столь широкое применение метода конечных элементов при расчете самых различных типов конструкций и сооружений объясняется целым рядом преимуществ, получаемых при использовании этого метода. Конечные элементы, на которые разбивается конструкция, могут быть произвольной формы, но достаточно малых размеровчем больше элементов, тем точнее конечно-элементная модель описывает реальное сооружение. Система уравнений МКЭ имеет ленточную структуру, что существенно упрощает и сокращает вычислительный процесс. Однако, повышение числа элементов (числа степеней свободы), уточняя поведение объекта, увеличивает размерность решаемой задачи и усложняет ее решение. Поэтому практически всегда стоит проблема разрешения противоречия: с одной стороны необходимо увеличивать размерность решаемой задачи, с другой возникают ограничения, порожденные возможностями вычислительных средств. Но в целом МКЭ представляет собой наиболее эффективный метод выражения перемещений любой строительной конструкции с помощью дискретной системы координат. Повышение же производительности вычислительных средств приводит к постепенному снятию указанного выше противоречия.
В предлагаемой диссертации при определении рациональных величин параметров структуры механической системы будет использоваться конечно-элементный подход. При этом для расчетов изгибаемых тонких пластин и пологих оболочек будут использованы хорошо известные конечные элементы, применение которых на сегодняшний день не вызывает никаких сомнений в полученных результатах.
На протяжении всего изложения мы будем пользоваться такими общими философскими понятиями, как система, элемент, структура, которые идут непосредственно от категорий «целое и часть» и «вещь-отношение» и используются во всей совокупности наук, характеризуя и материальные объекты, и создаваемые нами образы, модели, схемы этих объектов. Несмотря на широкое использование в строительной науке понятий система, элемент, структура приведем общепризнанные определения этих терминов.
Система (греч. 8уБ1ета — целое, составленное из частей) — множество закономерно связанных друг с другом элементов, представляющее собой определенное целостное образование. Для наших целей в узком смысле определения — конструкция, сооружение, составленные из твердых деформируемых тел.
Элемент (от лат. е1ешепйш1 — стихия, первоначальное вещество) -составная часть чего-либо. По тексту — часть конструкции, сооружения, пластины, оболочки и т. д.
Структура (лат. Б^сШга — строение, расположение, порядок) -взаиморасположение и связь составных частей чего-либо, строение, устройство. При конкретизации этого термина для задач строительной механики под структурой будем понимать геометрию формы сооружения, физические характеристики материала, способ соединения — характер связей элементов в конструкции или сооружении.
Как отмечалось ранее, исследования в области оптимального проектирования направлены на создание легких, прочных и экономичных строительных конструкций и сооружений. При этом, помимо спектра своих определенных и существенно дифференцированных требований к конструктивным элементам сооружения, приоритетными для функционирования всей системы являются требования прочности, жесткости и устойчивости. Таким образом, для реализации эффективного алгоритма оптимального проектирования несущих конструкций необходимо ответить на ряд вопросов: как наилучшим образом организовать структуру системы, т. е. изменить физические или геометрические параметры для достижения наивысшей сопротивляемости, а также каков критерий отбора и условия оптимальности проекта?
Именно разработке и реализации общих принципов и методов определения рациональных систем, обладающих наивысшей сопротивляемостью внешним воздействиям, и посвящена данная работа.
Теоретической базой для определения рациональных несущих конструкций изгибаемых тонких пластин и пологих оболочек при варьировании геометрических и физических параметров структуры системы послужили общие вариационные принципы и адаптационные методы, разработанные профессором Васильковым Г. В. [27, 32, 34, 35].
Структура работы. Диссертация состоит из введения, четырех глав, заключения и списка литературы, включающего 136 наименований. Полный объем диссертации 151 стр., включая 77 рисунков и 9 таблиц. Основной текст (без оглавления, списка литературы, рисунков и таблиц) излагается на 114 страницах машинописного текста.
Заключение
1. На основе вариационных принципов механики конструктивно нелинейных систем разработаны варианты адаптационного шагового метода определения рационального оребрения тонких пластин и пологих оболочек, позволяющие решать конструктивно нелинейные задачи по физическим и геометрическим параметрам структуры системы.
В частности были решены следующие задачи:
• определены оптимальные условия опирания и структура ребер жесткости для изгибаемой пластины на четырех шарнирных опорах, расположенных симметрично по диагоналям квадрата;
• определены зоны концентрации армирующего материала в гладкой прямоугольной пластине с центральным вырезом;
• определен орнамент рационального оребрения квадратных пластин и оболочек с центральным вырезом при дополнительных конструктивных ограничениях на величины варьируемых параметров.
2. Проведены исследования сходимости итерационного процесса определения изоэнергетических структур тонких пластин и пологих оболочек, подтверждающие приведенные теоретические предпосылки, согласно которым для изотропной среды изменение объема вещества вдоль векторов базиса прямоугольной системы происходит равномерно.
3. Разработана методика проектирования гладких пластин, согласно которой зоны концентрации материала (ребра жесткости) заменяются включениями элементов с повышенными механическими характеристиками, обеспечивающими условие энергетической равнопрочности.
4. Разработан алгоритм адаптационного шагового метода, позволяющего определять рациональную структуру системы при варьировании внешних воздействий. Были решены следующие задачи наследственного типа:
• определение рациональной формы оребрения изгибаемых тонких пластин при возникновении дополнительных внешних силовых воздействий;
• определение орнамента оптимального оребрения пластин при учете кинематических воздействий;
• определение структуры ребер жесткости несущих конструкций при возможном изменении граничных условий.
5. При рассмотрении растущих изоэнергетических систем обнаружены свойства бифуркации и фрактальности форм итоговых структур несущих конструкций, характерные для самоорганизующихся систем.
6. Рассматривая состояние энергетической равнопрочности как предельное (пограничное между существованием конструкции и ее полным разрушением), проведен сравнительный анализ геометрического расположения пластических шарниров в теории предельного равновесия и рационального оребрения, возникающего при стремлении систем к изоэнергетичности.
7. Создан программно-вычислительный конечно-элементный комплекс «Адаптация», реализующий изложенные в диссертации теоретические положения и алгоритмы. Программное средство разработано на основе концепций объектно-ориентированного программирования в среде Borland Delphi 6 и работает под управлением операционной системы Windows.
Разработанные в данной диссертационной работе методики решения адаптационных задач позволяют получать орнамент рационального оребрения несущих конструкций (пластин и оболочек) при решении прикладных задач.
Предложенные методики и алгоритмы, а также программно-вычислительный комплекс используются в учебном процессе [31]. Они применяются при выполнении научно-исследовательских работ студентами строительного факультета, при чтении спецкурса по строительной механике, при подготовке бакалаврских и магистерских дипломных работ, а также могут быть реализованы в реальном проектировании.
Список литературы
- Абгарян К.А. К теории балок минимального веса. В кн.: Расчеты на прочность. — М.: Машгиз. — 1962. — вып. 8. — С.136−151.
- Абовский Н.П. Ребристые оболочки.: Учебное пособие Красноярск. — 1967. — 64 с.
- Аксельрад Э.Л. Гибкие оболочки. М.: Наука. — 1976. — 376 с.
- Александров A.B., Лащеников Б. Я., Шапошников H.H. Строительная механика. Тонкостенные пространственные конструкции. -М.: Стройиздат 1983. — 488 с.
- Александров A.B., Потапов В. Д. Основы теории упругости и пластичности. М.: Высшая школа. — 1990. — 400 с.
- Аннин Б.Д. Оптимальное проектирование упругих анизотропных неоднородных тел. Третий национальный конгресс по теоретической и прикладной механике. Болгария, Варна. — 1977. — С.275−280.
- Баничук Н.В. Об оптимальных формах упругих пластин в задачах изгиба. Изв. АН СССР. МТТ. — 1975. — № 5. — С.180−188.
- Баничук Н.В. Определение оптимальных форм упругих криволинейных стержней. Изв. АН СССР. МТТ. — 1975. — № 6. — С. 124 133.
- Баничук Н.В. Оптимизация устойчивости стержня с упругой заделкой. Изв. АН СССР. МТТ. — 1974. — № 4. — С. 150−154.
- Баничук Н.В. Оптимальное проектирование в одномерных задачах изгиба для фиксированных и подвижных нагрузок. Изв. АН СССР. МТТ. — 1974.-№ 5.-С. 113−123.
- Баничук Н.В. Оптимизация форм упругих тел. М.: Наука. — 1980. -256 с.
- Баничук Н.В., Картвелишвили В. М., Миронов A.A. Численное решение двумерных задач оптимизации упругих пластин. Изв. АН СССР. МТТ. — 1977. — № 1. — С.68−78.
- Баничук Н.В., Картвелишвили В. М., Миронов A.A. Задачи оптимизации с локальными критериями качества в теории изгиба пластин. Изв. АН СССР. МТТ.- 1978.-№ 1. — С.124−131.
- Баничук Н.В. Минимизация веса крыла при ограничении по скорости дивергенции. Учен. зап. ЦАГИ. — 1978. — т.9. — № 5.
- Беллман Р. Динамическое программирование. М.: ИЛ — 1960 -400 с.
- Беллман Р. Процессы регулирования с адаптацией. М.: Наука -1964−359 с.
- Березовский A.A., ЖорийЮ.И. Нелинейные краевые задачи теории гибких пластин и пологих оболочек.: Труды семинара по математической физике. Киев.: Вып. 4. — 1970. — 416 с.
- Бисплингхофф Р.Л., Эшли X., Халфмен Р. Л. Аэроупругость. М.: ИЛ. — 1958.-800 с.
- Болотин В.В. Плоская задача теории упругости для деталей из армированных материалов. В кн.: Расчеты на прочность. — М.: Машиностроение. — 1966. — вып. 12. — С.3−31.
- Брайсон А., Хо-Ю-Ши. Прикладная теория оптимального управления. М.: Мир. — 1972. — 544 с.
- Брызгалин Г. И. К рациональному проектированию анизотропных плоских тел со слабым связующим. Изв. АН СССР. МТТ. — 1969. — № 4. — С.123−131.
- ВасидзуК. Вариационные методы в теории упругости и пластичности. Пер. с англ. М.: Мир. — 1987. — 542 с
- Васильков Г. В. Вычислительная механика и моделирование работы конструкций.: Учебное пособие. ч.2 Некоторые модели и методы теории упругости и пластичности. — Ростов-на-Дону.: Рост, гос. академия строит. — 1993. — 124 с.
- Васильков Г. В. Вычислительная механика и моделирование работы конструкций.: Учебное пособие. ч. З Прямые методы решения нестационарных задач строительной механики. — Ростов-на-Дону.: Рост. гос. академия строит. — 1994. — 156 с.
- Васильков Г. В. Локальный закон сохранения энергии деформаций в саморегулирующихся механических системах. // Известия ВУЗов. Северо-Кавказский регион. — Естественные науки. — 2003. -№ 2.
- Васильков Г. В., Маркин С. Г. Адаптационные методы определения энергетически равнопрочных пластин. // Известия ВУЗов. Машиностроение. 2002. — № 2.
- Васильков Г. В., Маркин С. Г. Фракталы — следствие стремления систем к изоэнергетичности. // Материалы международной научно-практической конференции «Строительство-2003». Ростов-н/Д: РГСУ. — 2003.
- Васильков Г. В. Новые вариационные принципы механики конструктивно нелинейных систем. // Известия ВУЗов. СевероКавказский регион. — Естественные науки. — 2001. — № 1 — С.25−28.
- Васильков Г. В. Об одном методе решения физически нелинейных задач строительной механики // СМ и РС. 1985. — № 6 — С. 13−16.
- Васильков Г. В. О вариационных принципах и методах определения энергетически равнопрочных систем. // Известия ВУЗов. Северо-Кавказский регион. — Естественные науки. — 2002. — № 2.
- Васильков Г. В. Теорема об изменении потенциальной энергии механической системы при добавлении новых связей // Известия ВУЗов. Северо-Кавказский регион. — Естественные науки. -2000. — № 4.
- Вентцель Е.С. Элементы динамического программирования. М.: Наука — 1964.- 175 с.
- Вилипыльд Ю.К., Хархурим И. Я. Расчет упругих систем по методу конечных элементов. М.: Гипротис. — 1969. — Вып. 1 — 108 с.
- Виноградов А.И. К вопросу о расчете стержневых систем наименьшего веса. Иссл. по теории сооруж. — М.: Госстройиздат. -вып. VIII. 1959.
- Витолин Д. Применение фракталов в машинной графике. // Сош-puterworld-Россия. 1995. — № 15. — С.11.
- Волошин A.B. Об эстетике фракталов и фрактальности искусства. В кн.: Синергетическая парадигма. М.: Прогресс-Традиция. -2002. — 495 с.
- Ворович И.И. О некоторых прямых методах в нелинейной теории пологих оболочек. ПММ. т.20 Вып. 4. — 1956. — С.449−474.
- Гантмахер Ф.Р. Лекции по аналитической механике. М.: Наука. — 1966.-300 с.
- Гасс С. Линейное программирование (методы и приложения). -М.: Физматгиз. 1961.
- Гура Н.М., Сейранян А. П. Оптимальная круглая пластинка при ограничениях по жесткости и частоте собственных колебаний. Изв. АН СССР. МТТ.- 1977.-№ 1.-С.138−145.
- Данциг Дж. Линейное программирование, его применения и обобщения. М.: Прогресс. — 1966.
- Зенкевич О. Метод конечных элементов в технике. М.: Мир. -1975.-541 с.
- Зуховицкий С.И., Авдеева Л. И. Линейное программирование. Теория, методы, приложения. М.: Наука. — 1967. — 460 с.
- Иеги Э.М. Оптимальная конструкция и ее проектирование. Труды Таллиннского политехи, ин-та. — 1967. — № 257. — С.63−85.
- Каркаускас Р.П., Крутинс A.A. и др. Строительная механика.: Программы и решения задач на ЭВМ. М.: Стройиздат. — 1990. -360 с.
- Картвелишвили В.М. Численное решение двух контактных задач для упругих пластин. Изв. АН СССР. МТТ. — 1974. — № 6. — С.68−72.
- Кефели А.И. О теоретических весах сооружений. Сборник Ле-нингр. ин-та инж. путей сообщ. вып. 96. — 1927.
- Кирпичев В.Л. Лишние неизвестные в строительной механике. 1-ое изд.-СПБ. — 1902.
- Корнишин М.С. Нелинейные задачи теории пластин и пологих оболочек и методы их решения. М.: Наука. — 1964. — 193 с.
- Красовский H.H. Теория управления движением. М.: Наука. -1968.-476 с.
- Красовский H.H. Теория оптимальных управляемых систем. Механика в СССР за 50 лет. М.: Наука. — 1968. — т. 1. — С. 179−244.
- Курант Р., Гильберт Д. Методы математической физики, т.1 М.: Гостехтеориздат. — 1951. — 476 с.
- Ливсли Р. Матричные методы строительной механики. М.: Строй издат. — 1980. -222 с.
- Липаев В.В. Проектирование программных средств. М.: Высшая школа. — 1990.-303 с.
- Мажид К.И. Оптимальное проектирование конструкций. / Пер. с англ. В. И. Дорофеева, под ред. М. А. Колтунова. М.: Высш. Школа. — 1979. -237 с.
- Малинин H.H. Прикладная теория пластичности и ползучести.-М.: Машиностроение.- 1975 399 с.
- Маркин С.Г., Голубенко Д. Г., Шамитько Д. А. Оптимальное проектирование изгибаемых тонких пластин. // Материалы международной научно-практической конференции «Строительство-2003». Ростов-н/Д: РГСУ. — 2003.
- Маркин С.Г. Определение рациональных геометрических параметров в рамных системах. Ростов н/Д: РГСУ. — 2001. Деп. в ВИНИТИ 29.05.01, № 1372-В2001.
- Маркин С.Г. Определение рациональных размеров строительных конструкций на основе варьирования геометрических параметров. // Материалы международной научно-практической конференции «Строительство-2001». Ростов-н/Д: РГСУ. — 2001.
- Маркин С.Г. Оптимизация формы изгибаемых тонких пластин. // Материалы международной научно-практической конференции «Строительство-2002». Ростов-н/Д: РГСУ. — 2002.
- Мелош Р. Основы получения матриц для прямого метода жестко-стей. Ракетная техника и космонавтика. — М. — 1963. — № 7. -С. 169−176.
- Михлин С.Г. Вариационные методы в математической физике. -М.: Наука.- 1970.-512 с.
- Моисеев H.H., Иванилов Ю. П., Столярова Е. М. Методы оптимизации М.: Наука. — 1978. — 352 с.
- Моисеев H.H. Численные методы и теории оптимальных систем. -М.: Наука. 1971.-424 с.
- Муштари Х.А. Теория изгиба пластинок минимального веса из композитного материала. Прикладная механика. — 1967. — т. 3. -№ 4. — С.1−7.
- Николаи Е.Л. Задача Лагранжа о наивыгоднейшем очертании колонн. Изв. Петербург, политехи, ин-та. — 1907. — т. 8.
- Норри Д., Же де Фриз. Введение в метод конечных элементов. -М.: Мир. 1981.-304 с.
- Образцов И.Ф., Васильев В. В., Бунаков В. А. Оптимальное армирование оболочек вращения из композиционных материалов. М.: Машиностроение. — 1977. — 144 с.
- Оден Дж. Конечные элементы нелинейной механики сплошных сред. М.: Мир. — 1976. — 464 с.
- Пашкеев С.Д., Минязов Р. И., Могилевский В. Д. Машинные методы оптимизации в технике связи. / Под ред. С. Д. Пашкеева. Учеб. Пособие для вузов. М.: Связь. — 1976. — 272 с.
- Понтрягин Л.С., Болтянский В. Г., Гамкрелидзе Р. В., Мищенко Е. Ф. Математическая теория оптимальных процессов. М.: Наука. — 1969. — 384 с.
- Постнов В.А., Хархурим И. Я. Метод конечных элементов в расчете судовых конструкций. Л.: Судостроение. — 1974. — 342 с.
- Рабинович И.М. Стержневые системы минимального веса. Труды II Всесоюз. съезда по теоретической и прикладной механике. -вып. 3., «Механика твердого тела». М.: Наука. — 1966.
- Рабинович И.М. К теории вантовых ферм. Исследование общих свойств ферм, состоящих исключительно из растянутых элементов и изыскание новых типов таких ферм. «Техника и экономика путей сообщения». -№ 1−4. — 1924.
- Рабинович И.М. К теории статически неопределимых ферм. Законы распределения усилий- метод заданных напряжений- начальные усилия в статически неопределимых фермах. М.: Трансжел-дориздат. — 1933.
- Расчет тонкостенных пространственных конструкций. / Сборник статей под ред. А. Р. Ржаницына. М. Стройиздат. — 1964.-295 с.
- Реклейтис Г., Рейвиндран А., Рэгсдел К. Оптимизация в технике. / Пер. с англ. В. Я. Алтаева, В. И. Моторина. В 2-х кн. Кн.1. М.: Мир. — 1986.-352 с.
- Реклейтис Г., Рейвиндран А., Рэгсдел К. Оптимизация в технике. / Пер. с англ. В. Я. Алтаева, В. И. Моторина. В 2-х кн. Кн.2. М.: Мир.- 1986.-320 с.
- Ржаницын А.Р. Предельное равновесие пластинок и оболочек. -М. «Наука». 1983.-288 с.
- Ржаницын А.Р. Строительная механика. М.: Высшая школа. -1991.-439 с.
- Розин J1.A. Вариационные постановки задач для упругих систем. -Л.: Изд. ЛГУ. 1978.- 223 с.
- Розин Л.А. Метод конечных элементов в применении к упругим системам. -М.: Стройиздат. 1977. — 128 с.
- Розин Л.А. О связи метода конечных элементов с методами Буб-нова-Галеркина и Ритца. / В сб.: Строительная механика и расчет сооружений. Л.: ЛПИ. — 1971. — С.6−28.
- Сегерлинд С. Метод конечных элементов в технике. — М.: Мир. -1972.-245 с.
- Сейранян А.П. Упругие пластины и балки минимального веса при наличии нескольких видов изгибающих нагрузок. Изв. АН СССР. МТТ. — 1973. — № 5. — С.95−101.
- Уманский A.A. Строительная механика самолета. М.: Оборонгиз. — 1961.-530 с.
- Ухов С .Б. Расчет сооружений и оснований методом конечных элементов. М.: МИСИ. — 1973. — 118 с.
- Федоренко Р.П. Приближенное решение задач оптимального управления. М.: Наука. — 1978. — 488 с.
- Фесик С.П. О наименьшем весе однажды статически неопределимых рам. Строительная механика и расчет сооружений. № 1. -1961.
- Фиакко А., Мак-Кормик Г. Нелинейное программирование. Методы последовательной безусловной минимизации. — М.: Мир. — 1972.-240 с.
- Филин А.П., Гуревич А. И. Применение вариационного исчисления к отысканию рациональной формы конструкций. Труды Jle-пингр. ин-та инж. ж.-д. трансп. — 1962. — вып. 190. — С. 161−187.
- Филин А.Л., Соломещ М. А., Гольдштейн Ю. Б. Классическое вариационное исчисление и задача оптимизации упругих стержневых систем. В кн.: Исследование по теории сооружений. — М.: Стройиздат. — 1972. — вып. 19. — С. 156−163.
- Хетагуров Я.А., Древе Ю. Г. Проектирование информационно-вычислительных комплексов. М.: Высшая школа. — 1987. — 280 с.
- Химмельблау Д. Прикладное нелинейное программирование. М.: Мир. — 1975.
- Хог Э., Apopa Я. Прикладное оптимальное проектирование: механические системы и конструкции. / Пер. с англ. В. М. Картвелишвили, A.A. Меликяна, под ред. Н. В. Баничука. -М.: Мир.-1983.-478 с.
- Ченцов Н.Г. Стойки наименьшего веса. Труды ЦАГИ. — 1936. -вып. 265. — С. 1−48.
- Черноусько Ф.Л. Некоторые оптимальные конфигурации ветвящихся стержней. Изв. АН СССР. МТТ. — 1979. — № 3.
- Черноусько Ф.Л., Баничук. Н. В. Вариационные задачи механики и управления: Численные методы. М.: Наука. — 1973. — 238 с.
- Черноусько Ф.Л., Колмановский В. Б. Вычислительные и приближенные методы оптимального управления. В кн.: Итоги науки и техники. Математический анализ. — М.: ВИНИТИ. — 1977. — т. 14.
- Чирас А.А. Строительная механика: теория и алгоритмы. М.: Стройиздат. — 1989. — 255 с.
- Шапошников Н.Н. Расчет пластинок на изгиб по методу конечного элемента. Вопросы прикладной механики. Вып. 260. М.: МИИТ.- 1968. С.134−144.
- Энеев Т.М. О применении градиентного метода в задачах теории оптимального регулирования. Космические исследования. -1966.-т. 4.-№ 5.
- Юдин Д.Б., Гольштейн Е. Г. Линейное программирование. Теория и конечные методы. М.: Физматгиз. — 1963. — 775 с.
- Юдин Д.Б., Гольштейн Е. Г. Линейное программирование. Теория, методы, приложения. М.: Наука, — 1969. — 424 с.
- Banichuk N.V., Karihaloo B.L. Minimum-weight design of multipurpose cylindrical bars. Int. Solids and Struct. — 1976. — vol. 12. — N 4.- P.267−273.
- Beightler C.S., Phillips D.T. Applied geometric programming. Wiley, N.Y. 1976.
- Bellman R.E. Dynamic programming. Princetion Univ., Princetion, N.J.- 1967.
- Blasius H. Trager kleinster Durchbeigung und Stabe grosster Knickfestigkeit bei gegebenem Materialverbrauch. Z. Math, und Phys. — 1914. -vol. 62.-P. 182−197.
- BognerF.K., FoxR.L., Schmidt L.A. A cilindrical shell discrete element. AIAA. 1967. — ol. 5. — № 4. — P.745−750.
- Budiansky B., Frauenthal J.C., Hutchinson J.W. On optimal arches. -J. Appl. Mech. Trans. ASME. 1969. vol. 36. — N 4. — P.239−240.
- Clausen T. Uber die Formarchitektonischer Saulen. Bull phys.-math. Acad. St.-Peterbourg. — 1851. — t. 9. — P.279−294.
- DuffinRJ., Peterson E.L., ZenerC. Geometrie programming. Wiley, N.Y. 1967.
- Frauenthal J.C. Constrained optimal design of circular plates against buckling. J. Struct. Mech. — 1972. — vol. 1. — P. 159−186.
- Galilei G. Discorsi e dimonstrazioni matematiche. Leiden. — 1638.
- Hadley G. Linear programming. Reading, Mass: Addison-Wesley. -1962.
- HofFN.J. Approximate analysis of the reduction in torsional rigidity and of the torsional buckling of solid wings under thermal stresses. J. Aeronaut. Sei. — 1956. — vol. 23. — № 6. — P.603−604.
- Keller J.B. The shape of the strongest column. Arch. Rational Mech. and Anal. — 1960. — vol. 5. — N 4. — P.275−285.
- Klosowicz B. Sur la nonhomogeneite optimal d’une barre tordue. -Bull. Acad, polon. sei. ser. sei. techn. 1970. — vol. 18. — N 8. — P.611−615.
- Klosowicz B., Lurie K.A. On the optimal nonhomogeneity of torsional elastic bar. Arch. Mech. — Warszawa. — 1971. — vol. 24. — N 2. -P.239−249.
- Lagrange J.L. Sur la figur des colonnes. Oevres. -1. 2. — 1780.
- Luenberger D.G. Introduction to linear and nonlinear programming. -Reading, MA: Addison-Wesley. 1973.
- Martin J.B. Optimal design of elastic structures for multi-purpose loading. J. Optimiz. Theory and Appi. — 1970. — vol. 6. — N 1. — P.22−40.
- Masur E.F. Optimum stiffness and strength of elastic structures. -ASCE J. Engr, Mech. Div. 1970. — vol. 96. — N 5. — P.621−640.
- Michell A.G.M. The limits of economy of material in Fram-Structures.- Philos. magaz. and Journ. of Sci. London. vol. 8. — ser. 6. — 1904.
- Mroz Z., Taylor J.E. Pre-stress for maximum strength. Int. J. Solids and Struct. — 1973.-vol. 9.-N 12. — P.1535−1541.
- Philips D.V., Zienkiewicz O.C. Finite elements non-linear analysis of concrete structures. «Proc. Instn. Civ. Engrs». Part 2. 1976. — vol. 61.- Mar. P.59−88.
- Prager W., Taylor J.E. Problems of optimal structural design. J. Appl. Mech. Trans. ASME. — 1968. — vol. 35.-N 1. — P. 102−106.
- Rijckaert M.J. Engineering application of geometric programming, in: optimization and desing./M. Avreil, D.J. Wilde, eds. Prentice-Hall, Englewood Cliffs, N.J. — 1974.
- Tadjbaksh I., Keller J.B. Strongest columns and isoperimetric inequalities for eigenvalues. J. Appl. Mech. — 1962. — vol. 29. — N 1. — P. 159 164.
- Taylor J.E. The stronges column, an energy approach. J. Appl Mech. Trans. ASME. — 1967. — vol. 34. — N 2. — P.486−487.
- Wu C.H. The strongest circular arch-a perturbation solution. J. Appl. Mech. Trans. ASME. — 1968. — vol. 35. — N 3. — P.476−480.