Виртуальный полигон для исследования морских объектов в экстремальных условиях эксплуатации
Используется вихрь Мерсенна. как основной и параметрический резонанс и брочинг. Выявлены качественные характеристики судна как колебательной системы в режимах основного и параметрического резонанса. Также выявлены нелинейные эффекты возникающие на экстремальных углах крена при параметрическом резонансе. Для режима брочинга были выделены основные классы возможных траекторий и проведена оценка… Читать ещё >
Содержание
- 1. Технология виртуальных полигонов для моделирования сложных технических объектов и систем
- 1. 1. Технология виртуальных полигонов
- 1. 2. Математические модели динамики внешней среды
- 1. 3. Математические модели динамики морских объектов
- 1. 3. 1. Классификация моделей динамики судов под воздействием внешних возмущений
- 1. 3. 2. Спектральные линейные и линеаризованные модели динамики судна
- 1. 3. 3. Нелинейные асимптотические модели динамики судна
- 1. 3. 4. Нелинейные численные модели динамики судна, основанные на уравнениях классической механики
- 1. 3. 5. Нелинейные численные модели динамики судна, основанные на уравнениях гидромеханики
- 1. 4. Технологии визуализации и виртуальной реальности
- 1. 5. Постановка задачи
- 1. 6. Выводы по главе 1
- 2. Численное моделирование динамики судна на нерегулярном волнении
- 2. 1. Математическая модель нерегулярного волнения
- 2. 2. Математическая модель динамики судна на нерегулярном волнении
- 2. 3. Оценка влияния случайного характера сеток на расчет статических и динамических характеристик судна
- 2. 4. Идентификация модели
- 2. 5. Выводы по главе 2
- 3. Программно-аппаратный комплекс виртуального полиго
- 3. 1. Состав и общая архитектура ПАК
- 3. 2. Подсистема моделирования
- 3. 2. 1. Сущности и фабрика сущностей
- 3. 2. 2. Lua API виртуального полигона
- 3. 2. 3. Объект «Таймер»
- 3. 2. 4. Объект «Корабль»
- 3. 2. 5. Типовой статический эксперимент: построение ДСО, определение метацентрической высоты
- 3. 2. 6. Типовой динамический эксперимент: качка на тихой воде
- 3. 3. Графическая подсистема
- 3. 3. 1. Общая структура графической подсистемы
- 3. 3. 2. Морфологическое сглаживание ступенчатости изображения
- 3. 3. 3. Технология отображения морского волнения
- 3. 3. 4. Расчет поля волнения с использованием CUDA
- 3. 4. Развертывание виртуального полигона на инфраструктуре
- ЦСМВ СПбГУ ИТМО
- 3. 5. Выводы по главе 3
- 4. Применение виртуального полигона для воспроизведения экстремальных ситуаций
- 4. 1. Режим основного резонанса
- 4. 1. 1. Цель и постановка эксперимента
- 4. 1. 2. Анализ результатов эксперимента
- 4. 2. Режим параметрического резонанса лагом к волне
- 4. 2. 1. Цель и постановка эксперимента
- 4. 2. 2. Анализ результатов эксперимента
- 4. 3. Режим параметрического резонанса на встречном волнении
- 4. 3. 1. Цель и постановка эксперимента
- 4. 3. 2. Анализ результатов эксперимента
- 4. 4. Режим брочинга
- 4. 4. 1. Цель и постановка эксперимента
- 4. 4. 2. Анализ результатов эксперимента
- 4. 5. Выводы по главе 4
- 4. 1. Режим основного резонанса
Виртуальный полигон для исследования морских объектов в экстремальных условиях эксплуатации (реферат, курсовая, диплом, контрольная)
Возможности изучения поведения сложных технических систем в экстремальных ситуациях экспериментальными методами существенно ограничены. Потому в настоящее время для этих целей активно применяется компьютерный эксперимент в реальном времени. Для интерпретации его результатов привлекаются технологии виртуальной реальности (BP), обеспечивающие «погружение» исследователя в моделируемое явление с возможностью всестороннего наблюдения и анализа воспроизводимых закономерностей реального мира. В свою очередь, это стимулирует развитие нового класса проблемно-ориентированных программных комплексов для проведения вычислительного эксперимента — виртуальных полигонов (ВП) для поддержки принятия решений в различных областях науки и промышленности [98]. Процесс проектирования и разработки ВП требует совокупного учета особенностей методов компьютерного моделирования в конкретной предметной области и соответствующих возможностей технологий BP, включая специфику аппаратной реализации. Это достигается путем адаптации математических моделей для формирования предметно-зависимых визуальных динамических сцен с высоким уровнем реалистичности и достоверности. В отечественной науке существенный вклад в развитие теоретических основ и практических решений в области технологий виртуальных полигонов внесен научными школами C.B. Клименко, H.H. Шаброва, М.В. Якобов-ского, Ю. М. Баяковского, М. В. Михайлюка, и ряда других исследователей.
Технологии ВП наиболее востребованы в направлениях, где проведение полномасштабных экспериментов экономически невыгодно или связано с существенными рисками. К таким областям, в частности, относится проектирование судов и технических средств освоения океана с повышенными требованиями к безопасности мореплавания, что требует изучения их поведения в разного рода аварийных ситуациях. Несмотря на то, что развитие аварийной ситуации является сложным многовариантным процессом, ретроспективный анализ известных инцидентов позволяет выделить условия, способствующие их возникновению, например, параметрические резонансы разной природы, потеря управляемости на гребне волны, захват судна волной (брочинг). В свою очередь, развитие каждой из вышеперечисленных ситуаций может усложняться за счет внутренних факторов (смещение навалочного груза, затопление отсеков, интенсивное обледенение и пр.). Как следствие, разнообразие и неоднозначность влияния экстремальных условий эксплуатации ограничивает возможности постановки экспериментов в опытовых бассейнах, и требует развития соответствующих проблемно-ориентированных программных комплексов на основе технологии ВП, что и определяет актуальность темы диссертации.
Предметом исследования является технология создания ВП применительно к задачам исследовательского проектирования морских объектов (МО) — судов и средств освоения океана.
Целью работы является развитие методов формирования предметно-ориентированных динамических сцен на основе компьютерного моделирования экстремальной динамики МО под воздействием нерегулярных внешних возмущений и разработка на их основе соответствующего математического и программного обеспечения ВП.
Задачи исследования. Достижение поставленной цели подразумевает решение следующих задач:
• Анализ существующих математических моделей поведения МО в экстремальных условиях эксплуатации, исходя из их применимости для формирования динамических сцен в ВП.
• Разработка метода численного моделирования экстремальной динамики МО с шестью степенями свободы на нерегулярном трехмерном волнении с адаптацией к специфике использования в составе ВП, его алгоритмическая и программная реализация.
• Разработка метода формирования динамических сцен на основе численного моделирования динамики внешней среды и МО, и его адаптация для широкоэкранных систем ВР.
• Проектирование, разработка и отладка программного комплекса ВП, его развертывание на аппаратной инфраструктуре Центра ситуационного моделирования и визуализации (ЦСМВ СПбГУ ИТМО)1.
• Апробация ВП для проведения компьютерных экспериментов по исследованию экстремальной динамики МО в режиме основного и.
1ЦСМВ — центр коллективного пользования СПбГУ ИТМО параметрического резонансов, а также в условиях брочинга2.
Методы исследования включают в себя методы вычислительной гидромеханики, теории вероятностей, математической статистики и имитационного моделирования, анализа алгоритмов и программ, обработки изображений и научной визуализации.
Научную новизну результатов работы определяют:
• Использование метода прямого моделирования динамики МО с шестью степенями свободы в нелинейной постановке, позволяющего унифицировать проведение компьютерного эксперимента для различных классов экстремальных явлений с возможностью интерактивного управления средствами ВП.
• Формирование реалистичных динамических сцен за счет применения метода численного интегрирования уравнений динамики МО на основе случайных сеток, обеспечивающих компенсацию ошибки вычислений и балансировку вычислительной нагрузки в условиях реального времени.
Практическую ценность работы составляют:
• Комплект программной и эксплуатационной документации на программную систему для моделирования и визуализации динамики МО в экстремальных условиях эксплуатации3.
• Программно-аппаратный комплекс ВП ЭЫрХ-БЗ, функционирующий на базе ЦСМВ СПбГУ ИТМО.
На защиту выносятся:
• Метод формирования визуальных динамических сцен на основе численного моделирования нелинейной динамики МО с шестью степенями свободы на нерегулярном трехмерном волнении.
• Архитектура программного комплекса ВП для исследования МО в экстремальных условиях эксплуатации с поддержкой аппаратных возможностей широкоэкранных систем ВР.
2Неуправляемый разворот судна вследствие «захвата» волной, сопровождаемый сильным динамическим креном.
3 Свидетельство о регистрации программы для ЭВМ № 2 011 611 381 — 2011.
Достоверность научных результатов и выводов обеспечивается строгостью наложенных ограничений предметной области, валидацией результатов моделирования путем сопоставления с классическими моделями корабельной гидродинамики, исследовательскими испытаниями работоспособности программно-аппаратного комплекса ВП на инфраструктуре ЦСМВ СПбГУ ИТМО, а также воспроизводимостью ряда нелинейных эффектов экстремальной динамики судна в ходе компьютерного эксперимента.
Внедрение результатов работы. Результаты работы нашли свое применение при выполнении проектов «Интеллектуальная система навигации и управления морским динамическим объектом в экстремальных условиях эксплуатации», «Интеллектуальные технологии поддержки процессов исследовательского проектирования судов и технических средств освоения океана», «Высокопроизводительный программный комплекс моделирования динамики корабля в экстремальных условиях эксплуатации», «Инструментальная технологическая среда для создания распределенных интеллектуальных систем управления сложными динамическими объектами» в рамках ФЦП «Научные и научно-педагогические кадры инновационной России» на 2009 — 2013 годы, «Распределенные экстренные вычисления для поддержки принятия решений в критических ситуациях» в рамках реализации постановления Правительства РФ № 220 «О мерах, но привлечению ведущих учёных в российские образовательные учреждения высшего профессионального образования», «Создание распределенной вычислительной среды на базе облачной архитектуры для построения и эксплуатации высокопроизводительных композитных приложений» в рамках реализации постановления Правительства РФ № 218 «О мерах государственной поддержки развития кооперации российских высших учебных заведений и организаций, реализующих комплексные проекты по созданию высокотехнологичного производства». Результаты работ внедрены в производственную деятельность ЗАО «Фирма „АйТи“. Информационные технологии».
Апробация работы. Изложенные в диссертации результаты обсуждались на восьми международных и всероссийских научных конференциях, семинарах и совещаниях, включая Всероссийскую научно-техническую конференцию «Интеллектуальные и информационные системы» (2009 г., Тула) — IX и X ежегодные Международные конференции «Высокопроизводительные параллельные вычисления на кластерных системах» (2009 г., Владимир- 2010 г., Пермь) — XVII Всероссийскую научно-методическую конференцию «Телематика 2010» (2010 г., Санкт-Петербург) — V, VII Межвузовские конференции молодых ученых (2008 г., 2010 г., Санкт-Петербург) — Всероссийскую конференцию «Технологии Microsoft в теории и нрактике программирования» (2010 г., Нижний Новгород), IV Международную конференцию по информатике MEDIAS (2011 г., Лимасол, Кипр).
Публикации. По теме диссертации опубликовано 10 печатных работ (из них 4 — в изданиях из перечня ведущих рецензируемых научных журналов и изданий, рекомендованных ВАК РФ).
4.5 Выводы по главе 4.
В четвертой главе показано использование разработанного виртуального полигона для воспроизведения ряда экстремальных ситуаций, таких х60 секунд — достаточное время развития явления брочинга для столь малого судна.
2 Используется вихрь Мерсенна [96]. как основной и параметрический резонанс и брочинг. Выявлены качественные характеристики судна как колебательной системы в режимах основного и параметрического резонанса. Также выявлены нелинейные эффекты возникающие на экстремальных углах крена при параметрическом резонансе. Для режима брочинга были выделены основные классы возможных траекторий и проведена оценка вероятности потери управляемости и вероятности наиболее опасного варианта развития при котором достигаются опасные углы крена.
Диаграмма установившейся скорости.
Диаграмма буксировочной силы.
V, м/с.
Рис. 4.13: Диаграмма установившейся скорости и буксировочной силы.
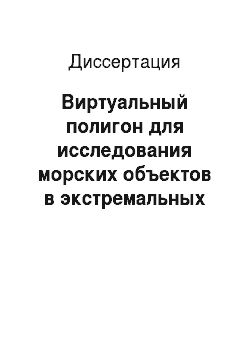
Класс траекторий I.
Класс траекторий ii.
Класс траекторий iii.
Рис. 4.14: Классы траекторий судна в режиме брочинга.
50.138 56.38 В.
3 46.7 1 Е? 23.3 г ."Г.
0.14 В 6.38з 12.63 $ 1а8882&
1.0″ 0.8″ 0.60.4″ 0.2-о.о—0.2−0.4−0.6−0.8−1.0.
150 200.
300 350.
Высота волны.
10 20 30 40 50 60 с о.
100 80″ 60″ 4020″ 0 -201 -40 -60 -80 -100.
0.25 0.20 0.15 -0.10 -у 0.05 0.00 -0.05 —0.10″ -0.15−0.20 -0.25.
30 с.
Угловая скорость ю.
1,с.
N2.
0.1 Зэ 6.38э 12.63 В.
18 89з 25.13э 31.38ig7.63s43.89s 50.1Зэ 56.38з.
— в—1-е^.
50 100.
— 0.0.
250 300 350 400.
Высота волны о сь.
1001 80 604 020 о.
— 20 -| -40 -60 -80 -100.
0.25.
0.20 «.
0.15.
0.10.
0.05.
0.00.
— 0.10 -0.15 -0.20 1 -0.25.
30 С.
Угловая скорость ю.
30 t, C.
60 со.
3 -сГ.
0.25 -0.20″ 0.15 -0.10 0.05 0.00 -0.05 -0.10 -0.15−0.20 «.
— 0.25 -0.
Высота волны.
Угловая скорость а.
Рис. 4.20: Стадии развития брочинга, сверху вниз: судно на вершине волны, судно начинает разворачиваться, судно получает опасный крен на борт.
Заключение
.
В ходе выполнения диссертационного исследования автором лично был выполнен аналитический обзор в проблемной области диссертационной работы, проведена адаптация метода моделирования динамики судна на нерегулярном волнении к задаче формирования динамических сцен в ВП, проектирование, разработка и развертывание ВП, а также проведена серия экспериментов по воспроизведению таких экстремальных явлений, как основной и параметрический резонанс и брочинг. В диссертацию включены результаты, соответствующие личному участию автора, а именно:
• развит метод численного моделирования экстремальной динамики МО с шестью степенями свободы на нерегулярном трехмерном волнении, основанный на интегрировании гидродинамических сил и моментов в нелинейной постановке на случайных сетках, допускающий интерактивное управление процессом вычислений на ВП;
• разработан метод формирования динамических сцен на основе численного моделирования динамики внешней среды и МО с учетом графических эффектов визуализации взволнованной поверхности моря и ее взаимодействия с корпусом объекта, адаптированный для применения в широкоэкранных системах ВР;
• разработана и детализирована архитектура ВП для изучения динамики МО в экстремальных условиях эксплуатации на основе модульного подхода к построению систем интерактивной визуализации;
• спроектирован и разработан программный комплекс ВП ЭЫрХ-ЭЗ, развернутый на инфраструктуре ЦСМВ СПбГУ ИТМО и продемонстрировавший свою работоспособность в ходе компьютерных экспериментов по исследованию экстремальной динамики МО в режиме основного и параметрического резонансов, а также в условиях брочинга.
Список литературы
- Апполонов Е.М., Бойцов Г. В., Кудрин М. А., Кутейников М. А., Ши-шенин Е.А. Исследования взаимодействия корпуса с аномальной волной на примере гибели судна «Аурелия», Российский морской регистр судоходства, Научно-технический сборник, выпуск 29, стр. 2844.
- Александров В.Л., Матлах А. П., Начаев Ю. И., Поляков В. И., Ростовцев Д. М., Интеллектуальные системы в морских исследованиях и технологиях / Под ред. Ю. И. Нечаева. СПбЖ Изд. центр СПбГ-МТУ, 2001, 395 с.
- Нечаев Ю.И., Дегтярев A.B., Бухановский A.B. Определение областей безопасной качки при оценке динамики судна на волнении. Доклады НТК «Проблемы мореходных качеств судов и корабельной гидромеханики» (XL Крыловские чтения), СПб, 2001, с. 117−119.
- Справочные данные по режиму ветра и волнения Японского и Карского морей / Лопатухин Л. И., Бухановский A.B., Чернышева Е. С. // Российский Морской регистр судоходства, СПб, 2009, 358 с.
- Зильман Г. И., Китаева Е. Т., Мирохин Б. В. Исследование особенностей качки судна на нерегулярном волнении методом статистического моделирования. Научно-тех. сб. Регистра СССР, 1986, вып.15, с.3−9.
- Бухановский A.B., Дегтярев A.B., Лопатухин Л. И., Рожков В. А. Вероятностное моделирование морского волнового климата // Известия АН. Физика атмосферы и океана, 1998, т.34, № 2, с.261−266.
- Нечаев Ю.И., Завьялова О.П. .Экстремальная ситуация «брочинг»: анализ и критериальные оценки условий «захвата» и опрокидывания судна // Морской вестник. № 1(9). 2004, с.87−92.ы.
- Атавин A.A., Васильев О. Ф., Тарасевич В. В., Яненко А. П. Нестационарные процессы в судопропускных сооружениях: математическое и лабораторное моделирование, натурные испытания. Proceedings of International Conference RDAMM-2001, с. 63−69.
- Бухановский A.B., Лопатухин Л. И., Иванов C.B. Подходы, опыт и некоторые результаты исследований волнового климата океанов и морей. I. Постановка задачи и входные данные. Вестник СПбГУ, сер. 7, вып. 3, 2005, с. 62−74.
- Александреску А. Современное проектирование на С++: Обобщенное программирование и прикладные шаблоны проектирования = Modern С++ Design: Generic Programming and Design Patterns Applied. — С. П.: Вильяме, 2008. — 336 с. — (С++ in Depth) .
- Лонге-Хиггинс M.С. Статистический анализ случайной движущейся поверхности. В кн.: Ветровые волны. М., ИЛ, 1962, с. 112−230.
- Бородай И.К., Нецветаев Ю. А. Качка судов на морском волнении // Л., Судостроение, 1969.
- Зенкин A.A. Когнитивная компьютерная графика / ред. Поспелов ДА. М: Наука, 1991. —192 С.
- И.Г. Ханович, Качка корабля, Военное Изд. Министерства Вооруженных Сил Союза ССР, М., 1947. .
- Проблемы исследования и математического моделирования ветрового волнения //под ред.И. Н. Давидана. СПб., Гидрометеоиздат, 1995.
- Пирсон В.Дж. Ветровые волны.-в сб.: Ветровые волны., М., ИЛ, 1962, с. 42−124.
- Луговский В.В. Нелинейные задачи мореходности корабля. JL, Судостроение, 1966.
- Некрасов В.А. Вероятностные задачи мореходности судов. JL, Судостроение, 1978.
- Безгодов А.А., Стародубцев Э. В. Реализация модели освещения Кука-Торренса с использованием технологии Deferred Shading // // Научно-технический вестник СПб ГУ ИТМО. 2008. с. 34−44.
- Лопатухин Л.И. Ветровое волнение. Санкт-Петербург, 2004. .
- ОСТ 5.1003−80. Методика расчета качки водоизмещающих кораблей и судов. Л., 1980.
- A note on ethical aspects of BCI / P. Haselagera, R. Vleka, J. Hillb, F. Nijboer // Neural Networks, Volume 22, Issue 9, November 2009. pp. 1352−1357.
- Arabshahi, A., Taylor, L. K, and Whitfield, D. L., UNCLE: Toward A Comprehensive Time-Accurate Incompressible Navier-Stokes Flow Solver, «AIAA-95−0050, AIAA 33rd Aerospace Sciences Meeting, Reno, NV, January 1995.
- Belenky V.L. Probabilistic qualities of nonlinear stochastic rolling / V.L. Belenky, A.B. Degtyarev, A. V Boukhanovsky // Ocean Engineering. -1998. Vol. 25, Ш. — P. 1−25.
- Belenky, V.L., Weems, K.M., W.M. Lin, Paulling J.R. Probabilistic analysis of roll parametric resonance in head seas, Proc. of STAB'03 8th International Conference on Stability of Ships and Ocean Vehicles, Madrid, Spain.
- Benedict D. Rogers. (2004) SPH Modeling of Breaking Waves, Coastal Engineering, pp 415−427.
- Boukhanovsky A.V., Guedes Soares C. Modelling of multipeaked directional wave spectra // Applied Ocean Research, 31 2009, p. 132 141.
- Brooks Jr. F.P. What’s Real About Virtual Reality? // IEEE Computer Graphics And Applications, 19(6). 1999. — pp. 16−27.
- Burdea G.C., Coiffet R Virtual Reality Technology, 2nd Edition. -Wiley-IEEE Press, 2003. 464 p.
- Charles W. Brice, Levent U. Gokdere, Roger A. (1998) DougalThe Virtual Test Bed: An Environment for Virtual Prototyping. Proceedings of International Conference on Electric Ship (ElecShip'98), pp. 27−31, Istanbul, Turkey, September .
- Claes Johanson «Real-time water rendering: Introducing the projected grid concept» Master of Science thesis .
- Clausen J. Man, machine and in between // Nature, 457 (26 February 2009). 2009. — pp. 1080−1081.
- Computational Steering / R. van Liere, J.D. Mulder, J.J. Van Wijk // Future Generation Computer Systems, Elsevier North-Holland, vol. 12, 441−450, 1997.
- Cook, R.L., Torrance. K.E., 1982. A Reflectanhce Model for Computer Graphics .
- Cruz-Neira C., Sandin D.J., DeFanti T.A. Surround-Screen Projection-based Virtual Reality: The Design and Implementation of the CAVE // SIGGRAPH'93: Proceedings of the 20th Annual Conference on Computer Graphics and Interactive Techniques, 1993.
- E. Catmull and J. Clark: Recursively generated B-spline surfaces on arbitrary topological meshes, Computer-Aided Design 10(6):350−355 (November 1978) .
- Flexible soft real-time processing in middleware / S.A. Brandt, G.J. Nutt // Real-Time Systems, Volume 22, Numbers 1−2. 2002. — pp. 77−118.
- France W.N.- Levadou M.- Treakle T.W.- Paulling J.R.- Michel R.K.- Moore C. An Investigation of Head-Sea Parametric Rolling and Its Influence on Container Lashing Systems, Marine Technology, Volume 40, Number 1, 1 January 2003, pp. 1−19(19) .
- Game Physics Simulation http://bulletphysics.org/wordpress/] .
- Hammock A. The future of brain-controlled devices. CNN. 2010http: //edition .cnn.com/2009/TECH/12/30/brain. controlled, computers / index .html.
- Herault, A. Bilotta, G., Del Negro, C. Russo, G. Vicari, A. (2009) SPH Modeling of Lava Flows With GPU Implementation, Proceedings of 4th International Scientific Conference on Physics and Control, Catania, Italy, September, 1-September, 4 2009.
- IIHR Hydroscience & Engineering Ship Hydrodynamics Website, Режим доступа: http://www.iihr.uiowa.edu/ shiphydro/cfdshipiowa.htm свободный].
- J. Monaghan and R. Gingold. (1983) Shock simulations by the particle method sph. Journal of Сотр. Physics, Vol. 52, p.374.
- Jorge Bardina and T. Rajkumar. Dougal. Intelligent Launch and Range Operations Virtual Test Bed (ILRO-VTB). Proceedings Vol. 5091 Enabling Technologies for Simulation Science VII, Alex F. Sisti- Dawn A. Trevisani, Editors, pp. 141−148 .
- Ki-Han Kim, Joseph Gorski, Ronald Miller, Robert Wilson, Frederick Stern, Mark Hyman, Clarence Burg, Simulation of Surface Ship Dynamics, dodugc, pp.188, 2003 User Group Conference (DoD UGC'03), 2003.
- Lin W.M., Yue D.K.R «Time-Domain Analysis for Floating Bodies in Mild-Slope Waves of Large Amplitude», Proceedings of the Eight International Workshop on Water Waves and Floating Bodies, Newfoundland, Canada.
- Lopatoukhin L.J. Freak waves generation and their probability (Вероятность возникновения волн-убийц) / L.J. Lopatoukhin, A.V. Boukhanovsky // Int. Shipbuilding Progress. 2004. — Vol. 51, № 2−3. — P. 157−171.
- Martin Mittring «Finding Next Gen CryEngine 2» Advanced RealTime Rendering in 3D Graphics and Games Course — SIGGRAPH 2007
- Michal Chladek, Roman Durikovic, (2010) Smoothed Particle Hydrodynamics in Flood Simulations, Proceedings of the 26th Spring Conference on Computer Graphics.
- Michiel van der Leeuw., 2007. «Deferred Rendering in Killzone 2». Presentation. .
- Monaghan, J. J. (1992) Smoothed particle hydrodynamics, Annual review of astronomy and astrophysics. Vol. 30 (A93−25 826 09−90), p. 543−574.
- Motion Simulation Capabilities of Three-Degree-of-Freedom Flight Simulators / N.A. Pouliot, C.M. Gosselin, M.A. Nahon // Journal of Aircraft 35 (1). 1998. — pp. 9−17.
- Ngan, A., Durand, F., Matusik, W., 2004. Experimental Analysis of BRDF Models. .
- Pawlowski M. Effect of Decks on Survivability of Ro-Ro Vessels // Proceedings of 9th International Conference on Stability of Ships and Ocean Vehicles (STAB-2006) 25−29 September, Rio de Janeiro, Brazil, 2006 (CD-version).
- Prospects for Computational Steering of Evolutionary Computation / S. Bullock, J. Cartlidge, M. Thompson // Workshop Proceedings of the
- Eighth International Conference on Artificial Life. MIT Press. 2002. -pp. 8−13.
- R. Ierusalimschy, L. H. de Figueiredo, W. Celes, The implementation of Lua 5.0, Journal of Universal Computer Science 11 #7 (2005) 1159−1176.
- Reshetov A. 2009. Morphological Antialiasing. In Proceedings of High Performace Graphics. http://visual-computing.mtel-research.net/publications/papers/2009/mlaa/mlaa.pdf .
- Rognebakke, O. F. & Faltinsen, О. M., 2001, 'Effect of sloshing on ship motions,' 16th IWWWFB, Hiroshima (электронный доступ http://www.iwwwfb.org/Abstracts/iwwwfbl6/iwwwfbl635.pdf).
- Rognebakke, О. F. & Faltinsen, О. M., 2003, 'Coupling of sloshing and ship motions,' J. Ship Research, 47, 3, 208−221.
- ROGUE WAVES 2008 // Proceedings of International Conference // Brest, France, 13−15 October 2008, edited by M. Olagnon & M. Prevosto. Режим доступа: http://www.ifremer.fr/web-com/stw2008/rw/papers.html свободный].
- Semantic eScience: Encoding Meaning in Next-Generation Digitally Enhanced Science / P. Fox, J. Hendler // The Fourth Paradigm. DataIntensive Scientific Discovery. Misrosoft, 2009. — pp. 147−152.
- Shin Y.S., Belenky V.L., Lin W.M., Weems K.M., Engle A.H. Nonlinear time domain simulation Technology for Seakeeping and Wave Load Analysis for Model Ship Design, SNAME Annual Meeting, San-Francisco, U.S.A., 2003.
- Shishkovtsov, O. 2005. Deferred shading in S.T.A.L.K.E.R. GPU gems 2: programming techniques for high-performance graphics and generalpurpose computation / edited by Matt Pharr — Randima Fernando, series editor.
- Shyh-Leh Chen, Wei-Chih Hsu FUZZY SLIDING MODE CONTROL FOR SHIP ROLL STABILIZATION. Asian Journal of Control, Vol. 5, No. 2, pp. 187−194.
- Spyrou K.J., «The Nonlinear Dynamics of Ships in Broaching», Marie Curie Fellowships Annals, Vol. 1. (электронный доступ http://www.mariecurie.org/annals/volumel/spyrou.pdf).
- Stochastic simulation of inhomogeneous metocean fields. Part I: Annual variability / A.V. Boukhanovsky et al. // Lecture Notes in Computer Science. 2003. — Vol. 2658. — P. 213−222.
- Stochastic simulation of inhomogeneous metocean fields. Part II: Synoptic variability and rare events / A.V. Boukhanovsky et al. // Lecture Notes in Computer Science. 2003. — Vol. 2658. — P. 223−233.
- Sturman, D.J., Zeltzer, D. A survey of glove-based input // IEEE Computer Graphics and Applications 14 (1). 1994. — pp. 30−39.
- Surendran S. Kiran V. Control of ship roll motion by active fins using fuzzy logic. Ships and Offshore Structures, Volume 2, Issue 1 2007, pp. 11 20.
- Tamburrini G. Brain to Computer Communication: Ethical Perspectives on Interaction Models // NEUROETHICS, Volume 2, Number 3. 2009. — pp. 137−149.
- The Freelmage Project http://freeimage.sourceforge.net/. .
- The Virtual Tank Utility in Europe (FP 6 516 201) // Режим доступа: http://www.hsva.de/01profilecontent/presscontent/VIRTUEforNavalArchitect.pcсвободный.
- TouchTable http://www.touchtable.com/.
- Umeda N., Hashimoto H., Vassalos D., Urano S. Okou K. Nonlinear Dynamics ion Parametric Roll Resonance with Realistic Numerical Modelling. Proc. of 8th Inter. Conference on the Stability of Ships and Ocean Vehicles STAB03.
- Visual Mining of Cluster Hierarchies / H.-P. Kriegel, S. Brecheisen, E. Januzaj, P. Kroger, M. Pfeifie // Proc. 3rd Int. Workshop on Visual Data Mining (VDM@ICDM2003). 2003. — pp. 151−165.
- Visualization for Data-Intensive Science / C. Hansen, C.R. Johnson, V. Pascucci, C.T. Silva // The Fourth Paradigm. Data-Intensive Scientific Discovery. Misrosoft, 2009. — pp. 153−163.
- Visually mining and monitoring massive time series / J. Lin, E. Keogh, S. Lonardi, J.P. Lankford, D.M. Nystrom // Proceedings of the 10 th ACM SIGKDD International Conference on Knowledge Discovery and Data Mining. 2004. — pp. 460−469.
- Welcome to Microsoft Surface http://www.microsoft.com/surface/].
- Weymouth G.D., Wilson R.V., Stern F. RANS Computational Fluid Dynamics Predictions of Pitch and Heave Ship Motions in Head Seas, Journal of Ship Research, Vol. 49, No. 2, June 2005, pp. 80−97.
- W.G. Hoover (2006) Smooth Particle Applied Mechanics: The State of the Art. World / Scientific Publishing Co Pte Ltd.
- Xsens Human Mocap, достуц свободныйhttp: / / www.xsens.com/еп/company-pages / company/human-mocap/.
- Yarwood B. Virtual Space The Future Of Movies and Video Games // 2009, доступ свободный http://www.virtualspace.org.uk/.
- Bitmap Font Generator, http://www.angelcode.com/products/bmfont/.
- Boukhanovsky A.V., Lopatoukhin L.J. Ryabinin V.E. Evaluation of the highest wave in a storm. Marine meteorology and related Oceanographic Activities. Report #38, WMO-TD-№ 858, 1998, 21 p.
- Harald E. Krogstad. (1989) Simulation of Multivariate Gaussian Time Series. Communication in Statistics. 18(3), p. 929−941.
- Mersenne Twister Home Page http://www.math.sci.hiroshima-u. ac. jp/m-mat/МТ / emt .html.
- Scilab WebSite http://www.scilab.org/.
- Sloot P.M.A., Frenkel D., Van der Vorst H.A. et al. Computational e-Science: Studying complex systems in silico. A National Coordinated Initiative. White Paper, February 2007. (http://www.science.uva.nl/research/scs/papers/archive/Sloot2007a.pdf)
- The Programming Language Lua http://www.lua.org/].