Исследование и разработка новых алгоритмических методов для синтеза трехмерных изображений высокого разрешения в ультразвуковой медицинской диагностике
Получение объёмных акустических изображений высокого разрешения представляет собой задачу значительной теоретической и практической важности как для ультразвуковой медицинской диагностики, так и для неразрушающего контроля материалов. В настоящее время трехмерная (3-D) визуализация осуществляется с помощью трех основных методов. Первый метод состоит в сканировании трансдюсером с аннулярной… Читать ещё >
Содержание
- Глава 1. Основные соотношения для описания сканирования в декартовых координатах
- 1. Вывод волнового уравнения
- 2. Решение волнового уравнения в приближении Борна
- 3. Анализ диаграмм направленности
- 4. Гауссов пучок
- 5. Иллюстрации
- Глава 2. Цифровая обработка сигналов
- 1. Переход к дискретному сигналу
- 2. Непрерывное и дискретное преобразования Фурье
- Аналитическое представление сигнала
- 3. Связь дискретных и непрерывных функций
- 4. Вычисления с дискретными сигналами
- Глава 3. Моделирование сигналов
- 1. Модель среды
- 2. Алгоритм моделирования сигналов
- 3. Методика универсального физического эксперимента
- Глава 4. Методы построения двумерных изображений
- 1. Метод динамической фокусировки на прием и метод синтетической апертуры
- 2. Двумерный метод формирования бездифракционного луча
- 3. Метод 2-х передатчиков
- 4. Результаты экспериментов
Исследование и разработка новых алгоритмических методов для синтеза трехмерных изображений высокого разрешения в ультразвуковой медицинской диагностике (реферат, курсовая, диплом, контрольная)
Данная работа посвящена алгоритмическим методам построения трехмерных изображений для целей ультразвуковой медицинской диагностики. В работе исследуются существующие и разрабатываются новые методы синтеза изображений.
Актуальность темы
.
Получение объёмных акустических изображений высокого разрешения представляет собой задачу значительной теоретической и практической важности как для ультразвуковой медицинской диагностики, так и для неразрушающего контроля материалов. В настоящее время трехмерная (3-D) визуализация осуществляется с помощью трех основных методов. Первый метод состоит в сканировании трансдюсером с аннулярной решеткой по азимутальному углу и углу места [1]. Этот метод позволяет получить динамическую фокусировку по обеим поперечным координатам для приемной диаграммы направленности. Однако время сбора данных в этом случае достаточно велико (порядка 2−3 сек.), а размер и вес датчика значительно больше, чем в традиционных медицинских приборах двумерной (2-D) визуализации. Кроме того, область обзора вблизи поверхности трансдюсера невелика по поперечным координатам.
Второй метод заключается в механическом сканировании линейной или конвексной одномерной решеткой вдоль направления, перпендикулярного плоскости электронного сканирования решетки (путем поступательного движения или вращения), с электронным сканированием в плоскости решетки [2], [3], [4]. Для фокусировки в направлении электронного сканирования используются методы, применяемые в 2-D визуализации, дающие достаточно узкую диаграмму направленности. Для обеспечения фокусировки в направлении механического сканирования на поверхность решетки устанавливается цилиндрическая линза с фиксированным фокусным расстоянием. Поперечное разрешение в этом направлении в зонах перед фокусом и за фокусом значительно хуже, чем разрешение в плоскости электронного сканирования. Для улучшения разрешения вдоль координаты движения следует применить метод обработки сигналов, аналогичный методу синтетической апертуры [5].
В одной из работ предлагается вращать фазированную решетку вокруг оси, проходящей через центр решетки перпендикулярно плоскости пьезоэлектрической пластины [6]. В этом случае удается достичь высокой скорости сканирования (до 10 кадров в секунду), однако разрешение по углу вращения оказывается низким (порядка 5 длин волн).
Благодаря прогрессу в областях технологии изготовления фазированных решеток и микроэлектроники в последние 2−3 года на рынке появились новые приборы, реализующие третий метод 3-D визуализации. Он основан на использовании 2-D фазированных решеток [7], [8], [9]. Для фокусировки используется многолучевой (4−8 лучей) метод динамической фокусировки на прием. Для уменьшения количества передающих и приемных каналов (не более 256) используется методика прореженных решеток. Вследствие малой активной площади апертуры для повышения отношения сигнал-шум необходимо излучение длинных кодированных сигналов в сочетании с методами сжатия импульса при обработке данных. Недостатками приборов с 2-D фазированными решетками являются высокая сложность изготовления датчика и сложность электронного оборудования, что обуславливает высокую стоимость прибора, и большое время сканирования для обзора большого сектора 3-D пространства.
В офтальмологии, дерматологии и, возможно, маммографии необходимы очень высокие значения поперечного и аксиального разрешения, которых возможно достичь лишь при использовании достаточно высоких частот (20−100 МГц). Изготовление линейной или фазированной решетки для работы на таких частотах гораздо сложнее, чем для широко используемых в медицине в настоящее время частот (3−7,5 МГц). Для достижения высокого разрешения при одновременном повышении отношения сигнал-шум было предложено использовать сплошной трансдюсер большого размера (порядка 50 длин волн) с фиксированным фокусным расстоянием, который осуществлял бы метод виртуального источника [10].
Этот метод является модификацией метода синтетической апертуры. Точка фокуса излучателя рассматривается как виртуальный излучающий элемент, являющийся источником почти сферических волн с некоторой диаграммой направленности. То же касается и приема сигналов. Формирование изображения осуществляется как в методе синтетической апертуры с той лишь разницей, что вычисляются задержки, соответствующие расстояниям от точек среды не до элементов решетки, а до положений точки фокуса апертуры.
Более подробное описание этого метода для 2-D изображения дано в [11]. Достоинством метода является высокое отношение сигнал-шум и простота вычислений. Однако, будучи основан на приблизительных вычислениях, он не позволяет достигнуть существенного уменьшения уровня боковых лепестков. Для 3-D визуализации алгоритм обработки сигналов требует большого объема вычислений. Кроме того, в работах [10], [11] не рассматривается обработка сигналов для зоны изображения перед точкой фокуса трансдюсера.
Указанный метод позволяет получить фокусировку и в области перед фокусом для всех значений дальности. Однако метод фокусировки на основе задержек сигналов виртуального источника' не является точным в своей основе, причем ошибка возрастает по мере того, как достигаемое поперечное разрешение приближается к длине волны.
Как альтернатива методам динамической фокусировки, основанным на временных задержках, рассматривается метод 2-D визуализации, основанный на пространственном преобразовании Фурье принятых сигналов по координате движения приёмо-передающего элемента небольшого размера (от половины до нескольких длин волн) [12]. Пространственное преобразование Фурье при этом умножается на фокусирующий множитель, г зависящий от глубины, пространственной частоты и временной несущей частоты сигнала. После вычисления обратного преобразования Фурье амплитуда комплекснозначного сигнала дает двумерное изображение. Преимуществом данного метода по сравнению с методом синтетической апертуры является меньший объем вычислений, однако он не позволяет получить оптимальную узкую диаграмму направленности для широкополосных импульсных сигналов и неприменим для трансдюсеров с большой апертурой.
Другим, более совершенным методом, основанным на Фурье-преобразованиях, является так называемый метод формирования бездифракционного луча [13], [14], [15]. Он применяется для сигналов, полученных при сканировании апертурой с фиксированным фокусным расстоянием, и позволяет строить как 2-D, так и 3-D изображения. При синтезе 3-D изображения осуществляется трехмерное преобразование Фурье принятых сигналов как функции времени и двух пространственных координат сканирования. Фокусировка на всём интервале глубин осуществляется путем преобразования временного и пространственного спектров, включающего преобразование временной частоты как функции пространственных частот. Этот метод не накладывает ограничений на размер апертуры и ширину спектра временных частот. В качестве излучателя можно использовать как сплошной излучатель, механически перемещаемый по двум координатам, так и механически перемещаемую линейную решетку. Метод позволяет получить узкую диаграмму направленности (ширину луча) в широком диапазоне дальностей, но для уменьшения уровня боковых лепестков необходимо применять аподизацию апертуры трансдюсера. Усовершенствование и проверка данного метода на данных физического эксперимента являются предметом настоящей работы.
Почти постоянное разрешение на большом интервале глубин можно также получить для случая цилиндрически-симметричного возбуждения на апертуре трансдюсера. Методы, основанные на решении волнового уравнения при этих условиях, называются, как и вышеописанный метод, методами бездифракционного луча (т. е. луча с ограниченной дифракцией). Подобные исследования для случая ультразвуковой визуализации описаны, например, в [16], [17]. Этот метод использует аннулярную решетку с различными функциями аподизации. Он может использоваться для 3-D визуализации, подобно описаиному в [1]. Поперечное разрешение на всём интервале глубин примерно равно рэлеевскому пределу для обычного сферического трансдюсера с фокусным расстоянием, равным максимальной глубине исследуемой области. Преимуществами, метода, описанного в [16], [17], являются простота реализации и возможность увеличения скорости формирования 3-D изображения за счет параллельного осуществления излучения-приема и обработки сигналов. К недостаткам относятся более высокий уровень боковых лепестков диаграммы направленности и более низкое разрешение, чем в методах, основанных на построении синтетической апертуры, при равном размере активной поверхности датчика.
Развиваются и другие подходы к получению ультразвуковых изображений (например, для задач дефектоскопии [18]), однако они пока не способны давать 3-D изображения высокого разрешения в области медицины. Методы акустической голографии не используются в медицинской диагностике, т. к. они обладают низким разрешением по дальности и требуют сложного оборудования [19]. Методы фокусировки ультразвуковых пучков, основанные на обращении волнового фронта, применяются в терапии (литотрипсия). В диагностике прямое их использование невозможно ввиду того, что исследуемая среда является весьма однородной. Тем не менее, обращение волнового фронта используется в ряде разработанных методов коррекции фазовых аберраций [20], [21], являющихся основным источником ухудшения качества изображения при обследованиях «трудных» пациентов [22].
Цель работы.
Целью данной работы является разработка методов формирования ультразвуковых 3-D изображений для медицинской диагностики, обеспечивающих высокое разрешение по трем пространственным координатам и малое время обзора пространства. В соответствии с этим в работе ставятся и решаются следующие задачи:
1) теоретическое исследование излучения и приёма ультразвуковых сигналов, их распространения и рассеяния в биологической среде с целью нахождения подходов к построению новых методов сканирования и их обоснования;
2) математическое моделирование и экспериментальная проверка метода формирования бездифракционного луча при использовании одноэлементной апертуры, сканирующей по узлам регулярной сетки в декартовых координатах;
3) построение и экспериментальная проверка новых схем излучения и приема сигналов и соответствующих алгоритмов обработки сигналов, позволяющих уменьшить время получения данных для одного кадра 3-D изображения по сравнению с существующими методами.
Для определения качества получаемые изображения будут оцениваться по следующим показателям: разрешение по 3 пространственным координатам, уровень боковых лепестков диаграммы направленности, отношение сигнал-шум, время съёма данных, необходимых для построения одного 3-D изображения, влияние движения объектов. Также важным показателем будет являться вычислительная сложность алгоритма и оценка времени обработки данных одного 3-D изображения на современных вычислительных средствах. Методы исследования.
В работе предлагаются новые конфигурации ультразвуковых датчиков и последовательности осуществления сканирования, а также различные варианты алгоритмов обработки данных. Все методы основаны на цифровой обработке сигналов, многие основаны на использовании дискретных быстрых преобразований Фурье.
В работе использовались методы цифровой обработки сигналов, линейной алгебры, теории волн, теории случайных процессов, теории уравнений математической физики и теории обобщенных функций. Структура диссертации.
Диссертационная работа состоит из введения, 7 глав, заключения и списка литературы.
§ 5. Выводы.
Характерной особенностью приведенных методов обработки сигналов является построение сигналов так называемой 2-D виртуальной решетки, осуществляющей 2-D сканирование по методу синтетической апертуры и имеющей вдвое меньший шаг, чем исходные линейные решетки датчика.
При разработке данного метода впервые были выведены формулы преобразования сигналов, позволяющие построить сигналы 2-D виртуальной решетки при использовании раздельных передающих и приемных апертур. На данном этапе применимость формул ограничена случаем гауссовых лучей, ширина спектра пространственных частот которых существенно меньше волнового числа к = со/с, и случаем малых расстояний между передающей и приемной субапертурами. Вообще, вопрос эквивалентности сканирования раздельными передающими и приемными апертурами и одной приемо-передающей апертурой в настоящее время недостаточно изучен [42], [43].
Предложенная схема позволяет сократить время съёма данных для получения 3-D изображения до времени съёма данных в современных приборах 2-D визуализации (около 2-Ю-2 сек. для 100 элементов в 2 передающих решетках и максимальной дальности в среде 15 см). При этом обеспечивается высокое разрешение в продольном и поперечном направлениях. По сравнению с методом бездифракционного луча из гл. 5, даже при условии, что перемещение излучателя происходит мгновенно, выигрыш во времени будет составлять 50−100 раз. В отличие от метода комбинированного электронно-механического сканирования (гл. 6) в данной схеме не требуется механического перемещения датчика, что значительно упрощает задачу обеспечения надежного акустического контакта датчика с исследуемой средой, не требует точных механических позиционирующих устройств.
Полное разделение передающих и приемных каналов позволяет применять для повышения отношения сигнал-шум длинные кодированные последовательности импульсов [44] с длительностью порядка времени распространения сигнала до максимальной дальности в среде, что невозможно в традиционных схемах. Кроме того, разделение каналов несколько упрощает конструкцию многоканальной приемо-передающей части прибора.
Для увеличения излучаемой мощности и повышения отношения сигнал-шум формирование передающих субапертур можно осуществлять ап-паратно. При этом усложняется электроника передающей части прибора. В алгоритме фокусировки формирование субапертур в этом случае необходимо осуществлять только на прием (в (7.4) пропадает второй экспоненциальный член и суммирование по передающим элементам, т. к. эта операция реализована аппаратно).
Для изготовления датчика возможно использовать пьезоэлектрические пластины, используемые в датчиках серийно выпускаемых приборов 2-D диагностики, однако на них необходимо устанавливать дефокусирую-щие цилиндрические линзы с коротким отрицательным фокусным расстоянием, которые в настоящее время не используются в приборах в силу иных требований к виду диаграммы направленности решетки. Возможен вариант использования пьезоэлектрика цилиндрической формы (ось цилиндра параллельна продольной оси решетки) без дополнительных линз, но такие решетки в настоящее время не изготавливаются серийно. Данные обстоятельства препятствуют изготовлению оборудования для проведения физических экспериментов.
Количество приёмных каналов и АЦП в приборе будет весьма большим (порядка 50−300), однако это количество примерно равно количеству приемных каналов в разрабатываемых приборах, использующих 2-D решетки [7], [8]. Количество приемных каналов можно уменьшать за счет проигрыша во времени сканирования.
Все предложенные методы фокусировки требуют проведения большого количества вычислений для получения одного 3-D кадра изображения, что, несмотря на высокую скорость получения физических данных, делает невозможным синтез 3-D изображения в реальном времени на компьютерах персонального класса («Pentium 4», «Power Мае» и т. п.) и архитектурах, использующих процессоры цифровой обработки сигналов (DSP). Но возможно в реальном времени синтезировать несколько (2−4) 2-D сечений для наведения датчика при помощи какого-либо более простого с вычислительной точки зрения алгоритма фокусировки, после чего снятые один или несколько кадров 3-D данных будут обработаны за несколько минут каким-либо из предложенных алгоритмов для получения 3-D изображения высокого разрешения.
Высокое поперечное и продольное разрешение на 3-D изображении позволят поднять информативность и достоверность медицинской ультразвуковой диагностики. Малое время съема данных позволит получить трехмерное изображение быстро движущихся органов, таких как сердце. Постоянный прогресс в области средств вычислительной техники позволяет рассчитывать в недалеком будущем на возможность осуществления фокусировки сигналов и построения 3-D изображения в реальном времени.
§ 6. Иллюстрации.
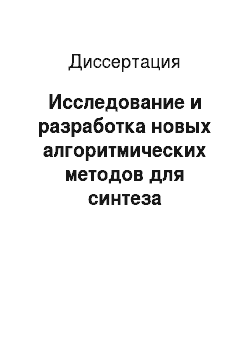
Рис. 7.1. Схема датчика в методе сканирования с формированием двумерной виртуальной решетки. Слева дана схема расположения одномерных решеток в датчике. Точками обозначены центры формируемых субапертур. Справа дан трехмерный вид схемы сканирования и используемых систем координат. Схематически указан сектор обзора. б) у, у ^ L 2-L -2 L а-9.
— 4+Н L 2 +3 -I.
Rx2 ооооооооооооооооооо.
Т"1.
Tx1-Rx2 Tx2-Rx2.
С D.
УЛШ '. «Л К ,.
Tx1-Rx3 Tx2-Rx3.
Е Rx3 F.
9//М ,.
А в.
Tx1-Rx1 Tx2-Rx1.
Т*2.
I о о*" о 6 о о о о о о о о о о о.
L1 ' L.
2 «Г3.
I I I.
— а 0 а.
Т X. X.
L х, X 2 3 2 L' ' L X, X.
2 2.
Рис. 7.2. Формирование виртуальной решетки, а) базовая схема датчика из 2 передающих и 2 приемных решеток, б) схема с дополнительной приемной решеткой РЯ1. Пунктиром обозначены контуры исходных решеток, белыми кругами —- центры исходных субапертур, черными кругами— центры субапертур виртуальной решетки (середины отрезков, соединяющих центры исходных субапертур передающих и приемных решеток). а) ул.
2N-1.
3 -1.
1. 2N.
Тх1.
Rx2.
1. 2N.
Rx3.
Тх2.
1.2N Rx1.
— 2N 4 2 б) уф.
2N+2M+1. 4N+2M.
2N+2M+2N-1 2N-1.
2N+2M-1.
2N+3 2N+1.
2N+2M+3 2N+2M + 1.
Rx2.
2N+1. 2N+2M.
Тх1.
Rx3 Тх2.
2N.
1. 2N.
Rx1.
2N+2M+2N.
2N+2M.
2N+4 2N+2.
2N+2M+4 2N+2M+2.
Рис. 7.3. Последовательность коммутации элементов передающих и приемных решеток при оценке влияния движения отражателей. Числа обозначают порядковые номера излучений. а) 1-я схема-— каждый передающий элемент используется 1 раз, прием осуществляется одновременно всеми элементами 3 приемных решеток, б) 2-я схема — каждый передающий элемент используется 2 раза (с 1-го по и с (N + М + })-го по jV-й элементы) или 3 раза (с (jV-A/+l)-ro по (N + М)-ц), прием осуществляется по очереди решетками fol, Rx3, Rx2. а).
ДфЖ.
L (L-2a) 0.
L-2a) б).
Лф Ф 0.
42L-a).
L'.
I I гa 0 a.
2 3.
2+a.
I I — -a 0 a t-a f 2 a.
Рис. 7.4. Графики зависимости набега фазы принятого сигнала от координаты у виртуальной решетки при движении отражателя по z. Здесь v. — скорость движения отражателя, vvИ/2Тй — скорость сканирования, а) 1-я схема коммутации элементов (см. рис. 7.3), б) 2-я схема.
Рис. 7.6. Результаты обработки данных компьютерного моделирования алгоритмом с когерентным сложением (данные те же, что и на рис. 7.5). а) Положение отражателей по поперечной координате при моделировании, б-г) Изображение фантома— сечения плоскостями XY для различных z: б) z = 4 см, в) z — 6 см, г) z = 10 см. Динамический диапазон 60 дБ.
Рис, 7.5. Результаты обработки данных компьютерного моделирования алгоритмом с когерентным сложением. Изображение фантома— сечения плоскостями XZ (у = 0) и YZ (ж = 0). В верхней части изображений указано положение отражателей по поперечной координате при моделировании, повторяющееся на каждой дальности. Динамический диапазон 60 дБ.
Рис. 7.7. Результаты обработки данных компьютерного моделирования алгоритмом с некогерентным сложением, у = 0 (данные те же, что и на рис. 7.6). Изображение фантома— сечения плоскостями xy для различных z: a) z = 3 см, б) z=4 см, в) z = 6 см, г) z = 8 см. Динамический диапазон 60 дБ.
Заключение
.
Для решения задачи получения объёмных акустических изображений высокого разрешения в медицинской диагностике в настоящей работе предложены 3 метода, использующие различные датчики и методы сканирования. Все методы требуют осуществления цифровой обработки сигналов, оцифрованных на радиочастоте, по алгоритмам, приведенным в соответствующих главах.
Корректность предложенных методов следует из использования при их построении анализа решения волнового уравнения, приведенного в гл. 1. Корректность перехода от аналитических вычислений к цифровым обосновывается в гл. 2. Методика компьютерного моделирования и универсального физического эксперимента обоснованы в гл. 3.
По своим характеристикам предложенные методы отличаются друг от друга.
Метод сканирования гл. 5 является наиболее простым с точки зрения аппаратной реализации датчика (может быть использован одноэлементный трансдюсер с фиксированным фокусом) и приемо-передающей части прибора (требуется один приемо-передающий канал, позволяющий оцифровывать принятый сигнал на радиочастоте). Он позволяет получить высокое отношение сигнал-шум, однако требует большого времени обзора пространства ввиду большого количества излучений сигнала и механического перемещения датчика. В большом диапазоне дальностей поперечное разрешение будет равно разрешению в фокусе трансдюсера.
Предложенный в гл. 6 метод позволяет в несколько десятков раз уменьшить количество излучаемых ультразвуковых импульсов, однако требует механического перемещения датчика. Отношение сигнал-шум в данном методе ниже, чем в методе гл. 5, и электронная часть прибора сложнее.
В гл. 7 излагается метод сканирования, использующий неподвижный датчик. По количеству излучений сигналов для одного кадра 3-D изображения данный метод аналогичен методу гл. 6, но при этом он не требует механического перемещения датчика. В отличие от разрабатываемых в настоящее время двумерных фазированных решеток количество элементов в датчике мало (порядка 200−500) и уровень боковых лепестков в сфокусированном сигнале невысок по сравнению с 2-D разреженными решетками при высоком пространственном разрешении. В результате обработки приведенным алгоритмом фокусировки (с когерентным сложением) можно достичь поперечного разрешения, превосходящего разрешение одноэлементного сфокусированного трансдюсера с размером, равным размеру предложенного датчика. Недостатком метода является низкое отношение сигнал-шум.
Разделение передающих и приемных каналов в датчиках гл. 6 и гл. 7 позволяет для повышения отношения сигнал-шум использовать длинные кодированные последовательности импульсов с большим коэффициентом сжатия (100−1000).
Достоверность всех методов, изложенных в работе, доказана путем компьютерного моделирования, а методов глав 5 и 6, кроме того, путем физического эксперимента.
Методы гл. 6 и гл. 7 решают проблему сокращения времени сканирования при 3-D визуализации. При этом показано, что предложенные методы обеспечивают высокое пространственное разрешение по всем направлениям, причем поперечное разрешение может быть выше, чем у современных приборов 2-D изображения.
В соответствии с характеристиками методов можно предложить следующие области медицинского применения. Для метода бездифракционного луча гл. 5 — маммография, офтальмология, дерматологиядля метода комбинированного электронно-механического сканирования гл. 6 — маммография, абдоминальные исследования, исследования малых органовдля метода 2-D виртуальной решетки гл. 7 — исследования малых органов, кардиология. Малое время съема данных в последнем методе должно позволить получать «мгновенное» 3-D изображение движущегося сердца с высоким разрешением (без использования приемов накопления данных с синхронизацией по сердечному ритму), что невозможно осуществить другими известными методами. Указанные методы могут также найти применение в неразрушающем контроле материалов.
Поскольку размер синтезируемой апертуры в предложенных методах фокусировки велик, для исправления изопланатических фазовых аберраций при исследованиях «трудных» пациентов необходимо использовать методы, основанные на вычислении функции взаимной корреляции сигналов или на обращении волнового фронта. Большинство описанных в литературе методов могут быть использованы в предложенных схемах сканирования гл. 6 и гл. 7, а также гл. 5 в случае использования в качестве датчика линейной решетки.
При построении методов 3-D сканирования разработана теория анализа сигналов на основе их пространственно-временных спектров. Разработана теория построения 2-D виртуальной решетки для случая гауссовых лучей.
Разработанные методы позволят повысить диагностическую способность медицинской сонографии, особенно для быстро движущихся органов, таких как сердце. Реализация аппаратной части приборов технически возможна уже в настоящее время. Получение 3-D изображения большой области пространства в реальном времени, однако, в медицинском приборе на настоящее время невозможно, т. к. это требует вычислительных комплексов, в несколько десятков раз превосходящих по производительности системы класса персональных компьютеров, построенных на базе процессоров типа «Intel Pentium 4», или системы с несколькими процессорами цифровой обработки сигналов.
В настоящее время возможно осуществлять в реальном времени синтез изображений нескольких 2-D сечений объема среды, по которым можно осуществлять наведение датчика, после чего отснятые один или несколько кадров 3-D изображения будут обработаны в течение нескольких минут по алгоритму 3-D фокусировки и станут доступны для просмотра. Для предварительной фокусировки в реальном времени следует использовать алгоритмы, построенные на основе методов динамической фокусировки или синтетической апертуры. Их рассмотрение выходит за рамки настоящей работы.
Учитывая постоянный прогресс в области средств вычислительной техники, следует ожидать возможности реализации синтеза 3-D изображения в реальном времени предложенными методами в медицинском приборе средней ценовой категории через 8−12 лет.
Список литературы
- D. Kirbach, Т. A. Whitlingham. «3D Ultrasound — the Kretztechnic Volu-son® Approach». Eur. J. Ultrasound, vol. 1, pp. 85−89, 1994.
- T. R. Nelson, D. H. Pretorius. «Three-Dimensional Ultrasound Imaging». Ultrasound in Med. Biol., vol. 24, no. 9, pp. 1243−1270, 1998.
- S. Berg, H. Torp, D. Martens, E. Steen, S. Samstad, I. Hoivik, B. Olstad. «Dynamic Three-Dimensional Freehand Echocardiography Using Raw Digital Ultrasound Data». Ultrasound in Med. Biol., vol. 25, no. 5, pp. 745−753, 1999.
- R. Canals, G. Lamarque, P. Chatain. «Volumetric Ultrasound System for Left Vertical Motion Imaging». IEEE Trans. UFFC, vol. 46, no. 6, Nov. 1999.
- P. O. Corel, C. S. Kino. «A Real-Time Synthetic Aperture Imaging System». Acoust. Imaging, vol. 9, pp. 341−355, 1970.
- S. I. Nikolov, J. A. Jensen, R. Dufait, A. Schoisswohl. «Three-Dimensional Real-Time Synthetic Aperture Imaging Using a Rotating Phased Array Transducer». Proc. IEEE Ultrason. Symp., pp. 1509−1517, 2002.
- S. W. Smith, W. Lee, E. D. Light, J. T. Yen, P. Wolf, S. Idriss. «Two-Dimensional Arrays for 3-D Ultrasound Imaging». Proc. IEEE Ultrason. Symp., pp. 1509−1517,2002.
- J. T. Yen, S. W. Smith. «Real-Time Rectilinear 3-D Ultrasound Using Receive Mode Multiplexing». Abstracts IEEE Ultrason. Symp., p. 66, 2003.9. http://www.medical.philips.com.
- C. Passmann, H. Ermert. «A 100 MHz Ultrasound Imaging System for Der-matologic and Ophthalmologic Diagnostics». IEEE Trans. UFFC, vol. 43, pp. 545−552, July 1996.
- С. H. Frazier, W. D. O’Brien, Jr. «Synthetic Aperture Techniques with a Virtual Source Element». IEEE Trans. UFFC, vol. 45, pp. 196−207, Jan. 1998.
- J. T. Ylitalo, H. Ermert. «Ultrasound Synthetic Aperture Imaging: Monostatic Approach». IEEE Trans. UFFC, vol. 41, pp. 333−339, May 1994.
- M. Бененсон, H. С. Кульберг. Алгоритмический синтез дифракционно-ограниченного луча для получения трехмерных изображений высокого разрешения. Доклады Академии наук, т. 352, № 5} Сс. 606 609, Москва, 1997.
- Z. М. Benenson, N. S. Kulberg, Т. Т. Kasumov. «A New Approach to Obtain Non-Diffraction Beam with Near-Field Resolution on Linear and Convex Arrays». Acoust. Imaging, vol. 23, pp. 303−308, 1997.
- J.-Y. Lu, M. Fatemi, J. F. Greenleaf. «Pulse-Echo Imaging With X-Waves». Acoust. Imaging, vol. 22, pp. 191−196, 1996.
- J.-Y. Lu. «2D and 3D High Frame Rate Imaging With Limited Diffraction Beams». IEEE Trans. UFFC, vol. 44, no. 4, pp. 839−856, July 1997.
- X. Yin, S. A. Morris, W. D. O’Brien, Jr. «Experimental Spatial Sampling Study of the Real-Time Ultrasonic Pulse-Echo BAI-mode Imaging Technique». IEEE Trans. UFFC, vol. 50, pp. 428−440, 2003.
- Г. Кайно. Акустические волны. Устройства, визуализация и аналоговая обработка сигналов. М.: Мир, 1990.
- D. Rachlin. Direct Estimation of Aberrating Delays in Pulse-Echo Imaging Systems. J. Acoust. Soc. Am., vol. 88, no. 1, pp. 191−198, July 1990.
- J.-F. Aubry, D. Cassereau, M. Tanter, T. Pellegrini, M. Fink. Skull Surface Detection Algorithm to Optimize Time Reversal Focusing Through a Human Skull. Proc. IEEE Ultrason. Symp., pp. 1419−1422, 2002.
- M. O’Donnell, S. W. Flax. Phase Aberration Measurements in Medical Ultrasound: Human Studies. Ultrasonic Imaging, vol. 10, pp. 1−11, 1988.
- J. A. Jensen. «A Model for the Propagation and Scattering of Ultrasound in Tissue». J. Acoust. Soc. Amer. vol. 89, no. 1, pp. 182−190, 1991.
- Л. M. Бреховских, О. А. Годин. Акустика слоистых сред. М.: Наука, 1989.
- Под ред. К. Хилла. Применение ультразвука в медицине. Физические основы. М.: Мир, 1989.
- Под ред. С. Уэбба. Физика визуализации изображений в медицине. Том 2. М.: Мир, 1991.
- J. W. Goodman, «Introduction to Fourier Optics», New York: McGraw Hill Book Company, 1968.
- Г. Корн, Т. Корн. Справочник по математике (для научных работников и инженеров). М.: Наука, 1973.
- Л. Ф. Лепендин. Акустика. М.: Высшая школа, 1978.
- A. Penttinen, М. Luukkala. «The Impulse Response and Pressure Near-Field of a Curved Ultrasonic Radiator». J. Phys. D 9, pp. 1547−1557, 1976.
- M. Б. Виноградова, О. В. Руденко, А. Н. Сухоруков. Теория волн. М.: Наука, 1979.
- У. Прэтт. Цифровая обработка изображений (в 2-х кн.). Кн. 1. М: Мир, 1982.
- Дж. Гудмен. Статистическая оптика. М.: Мир, 1998.
- Д. Даджион, Р. Мерсеро. Цифровая обработка многомерных сигналов. М.: Мир, 1988.
- Р. Эдварде. Ряды Фурье в современном изложении. Том 1. М.: Мир, 1985.
- J. A. Jensen, P. Munk. «Computer Phantoms for Simulating Ultrasound B-Mode and CFM Images». Acoustical Imaging, vol. 23, pp. 75−80, 1997.38. http://bul.eecs.umich.edu.
- P. Г. Придэм, P. А. Муччи. Цифровой интерполяционный метод формирования луча для низкочастотных и полосовых сигналов. ТИИЭР, т. 67, июнь 1979.
- J1. В. Осипов. Ультразвуковые диагностические приборы. М.: Видар, 1999.
- G. R. Lockwood, J. R. Talman, S. S. Brunke. «Real-Time 3-D Ultrasound Imaging Using Sparse Synthetic Aperture Beamforming». IEEE Trans. UFFC, vol. 45, no. 4, July 1998.