Исследование оптико-электронных систем измерения параметров пространственной ориентации перемещаемых объектов
Таким образом, отсутствуют серийные приборы, позволяющая выполнить с одной стороны, шести-координатные измерения, а с другой стороны, реализовать требуемый в задачах 1 .4 диапазон измерения. Поэтому в практических случаях измерительная система строится по принципу сочетания различных приборов или отдельных измерительных каналов. В результате измерительная система существенно усложняется, что… Читать ещё >
Содержание
- ГЛАВА 1. ОСНОВНЫЕ ПУТИ РАСШИРЕНИЯ ДИАПАЗОНА ИЗМЕРЕНИЯ И ПОВЫШЕНИЯ ТОЧНОСТИ ОПТИКО-ЭЛЕКТРОННЫХ АВТОКОЛЛИМАТОРОВ
- 1. 1. Обобщенная структура измерительной системы
- 1. 2. Принципы классификации измерительных схем
- 1. 3. Измерительные системы с единой измерительной схемой смешанного вида
- 1. 3. 1. Измерительные системы прямого действия
- 1. 3. 2. Автоколлимационные системы
- 1. 4. Измерительные системы с единой измерительной схемой
- 1. 4. 1. Системы прямого действия
- 1. 4. 2. Автоколлимационные системы
- 1. 5. Измерительные системы с раздельной схемой
- 1. 5. 1. Измерительные системы прямого действия
- 1. 5. 2. Автоколлимационные измерительные системы
- 1. 6. Выводы из обзора типовых схем ОЭС ЙППО
- 1. 6. 1. Формулировка предмета проводимых исследований
- 1. 6. 2. Элементная база типовых модулей
- 2. 1. 1. Структура исследуемой системы
- 2. 1. 2. Варианты структурной схемы ОЭС
- 2. 1. 3. Обобщенная схема ОЭС упорядоченного вида
- 2. 1. 4. Обобщенная схема ОЭС смешанного вида
- 2. 1. 5. Метод анализа вариантов ОЭС 52 2.2 Анализ чувствительности ОЭС. Принцип раздельного рассмотрения
- 2. 3. Чувствительность к линейным смещениям контролируемого объекта в Плоскости перемещения
- 2. 4. Чувствительность к линейным смещениям контролируемого объекта по оптической оси ИОЭП (измерение расстояния)
- 2. 5. Чувствительность к поворотам контролируемого объекта
- 2. 5. 1. Расположение измерительных марок при построении ОЭС измерения пространственного положения объекта
- 2. 5. 2. Особенность измерения угловых координат в ОЭС упорядоченного вида
- 2. 6. Выводы по материалам главы
- 3. 1. Типовая задача — измерение параметров пространственной ориентации буксируемого объекта
- 3. 1. 1. Измерительная задача
- 3. 2. Расположение ИОЭП и ИМ ОЭС 69 3.2.1 Элементная база ОЭС
- 3. 3. Основные габаритные соотношения
- 3. 4. Проверочный энергетический расчет 72 3.5 Анализ основных составляющих погрешности измерения
- 3. 5. 1. Первичные погрешности
- 3. 5. 2. Оценка величины первичной погрешности измерения координат изображений на чувствительной площадке ПЗС-матриц
- 3. 5. 3. Оценка величины первичной погрешности — отклонения величины базы от номинального значения
- 3. 5. 4. Оценка величины первичной погрешности — отклонения величины фокусного расстояния от номинального значения
- 3. 5. 5. Оценка величины первичной погрешности вследствие отклонения оптической оси приемного объектива по причине турбулентности воздушного тракта
- 3. 6. Расчет частичных погрешностей измерения
- 3. 6. 1. Оценка погрешности измерения расстояния до контролируемого объекта (координаты по оси визирования OZ)
- 3. 6. 2. Оценка погрешности измерения линейных смещений в плоскости перемещения
- 3. 6. 3. Оценка погрешности измерения угловых координат ОЭС смешанного типа
- 3. 6. 4. Оценка погрешности измерения угловых координат ОЭС упорядоченного типа
- 3. 6. 5. Резюме по расчету составляющих погрешности измерения
- 3. 7. Выводы по материалам главы
- 4. 1. Алгоритм измерения ОЭС упорядоченного типа
- 4. 2. Алгоритм измерения ОЭС ИППО упорядоченного вида
- 4. 3. Алгоритм измерения ОЭС ИППО смешанного вида
- 4. 4. Принципы построения модели ОЭС упорядоченного и смешанного типов
- 4. 5. Анализ результатов экспериментального исследования модели ОЭС
- 4. 5. 1. Зависимость погрешности измерения линейных и угловых координат от смещений и поворотов контролируемого объекта
- 4. 5. 2. Зависимость погрешности измерения координат объекта от погрешности измерения координат изображений измерительных марок
- 4. 6. Резюме по материалам главы
Исследование оптико-электронных систем измерения параметров пространственной ориентации перемещаемых объектов (реферат, курсовая, диплом, контрольная)
Для совершенствования контрольно-измерительной техники необходимы исследования принципов построения схем и анализ методик расчета параметров высокоточных универсальных оптических и оптико-электронных измерительных систем контроля пространственного положения объектов. Наряду с теоретическими исследованиями для повышения достоверности разработанных методик также требуется практическая реализации и исследование измерительных систем как на компьютерных моделях так и экспериментальных образцах.
1. Актуальность исследования.
Метрологическое обеспечение многих измерительных задач производственной и научной деятельности предусматривает измерение пространственного положения некоторых объектов контроля относительно единой жесткой базы в процессе их перемещения.
В частности, могут быть выделены следующие измерительные задачи.
1. Метрологическое обеспечение монтажных операций.
Развитие строительства, производства электроэнергии, машиностроения и приборостроения требует точной ориентации сопрягаемых узлов оборудования, определения параметров взаимного расположения частей и блоков в процессе монтажа. Например, необходим контроль точности позиционирования при установке ферм, стеновых панелей, монтаже технологического оборудования, и т. д. /1,2/. При этом эффективность последующей операции точной юстировки положения оборудования в значительной мере определяется точностью выполнения монтажной операции.
2. Определение пространственного положения буксируемых объектов.
Разработка и исследование новых транспортных средств для водной, воздушной и наземной сред требует трудоемких предварительных испытаний их уменьшенных моделей в опытовых бассейнах, аэродинамических трубах, а также в штатных условиях эксплуатации. Необходимая разработчикам информация в значительной степени заключена в динамике движения и изменения ориентации буксируемой модели /6/.
3. Метрологическое обеспечение юстировочных операций.
Совершенствование технологии изготовления современных средств производства, самолетов и кораблей, установок для научных исследований требует точного контроля положения деталей при их сборке, юстировке и последующей эксплуатации. Например, такие измерения обязательны при заключительных операциях сборки и юстировки авиационных и корабельных стапелей, координатных стендов, наземных радиотелескопов, блоков ускорителей заряженных частиц и т. д. /5/.
4. Мониторинговые измерения.
Повышение надежности и безопасности функционирования промышленных, инженерных и жилых сооружений, энергетических установок определяет необходимость оперативного контроля деформаций и прогибов нагруженных элементов конструкций инженерных сооружений: фундаментов реакторов, пролетов мостов, плотин, стенок доков, резервуаров и т. д. /3,4/. При этом деформация приводит к пространственному перемещению элемента конструкции.
Развитие оптоэлектронной элементной базы и основанных на ней средств измерения делает перспективным использование для метрологического обеспечения указанных задач оптико-электронных измерительных систем, позволяющих реализовать высокоскоростные и бесконтактные измерения, автоматизировать процесс снятия отсчета, повысить достоверность получаемой информации.
В связи с рассмотренными обстоятельствами, исследования оптико-электронных систем определения пространственной ориентации перемещаемых объектов являются актуальными и своевременными.
Определение области научных исследований.
Описание задачи измерения Анализ показывает, что метрологически указанные задачи в общем случае сводятся к одной процедуре: измерению пространственного положения твердого тела (контролируемого объекта) относительно некоторой базовой системы координат.
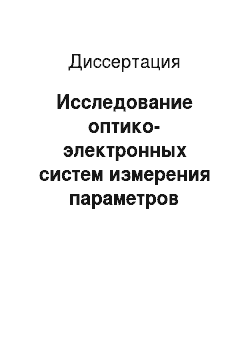
При этом с измерительной системой, установленной на жесткой базе или некотором базовом объекте, связана неподвижная система координат XYZ, а с контролируемым объектом — система координат XYZi (подвижная). Пусть в так называемом «согласованном положении контролируемого.
Рис. 1. объекта" оси системы координат XiYjZi параллельны соответствующим осям неподвижной системы координат. Линия, соединяющая начальные точки.
0,0i систем координат (линия визирования контролируемого объекта) совпадает с осью OZ неподвижной системы (рис. 1).
Дистанция L до объекта численно равна координате Z0 точки Oj начала системы координат XjYiZ] в системе координат XYZ.
Плоскость, совпадающая с плоскостью X1Y1Z1 назовем плоскостью S перемещения контролируемого объекта. Соответственно, параллельную ей плоскость XjYiZ] назовем базовой плоскостью.
В процессе перемещения контролируемого объекта при монтаже или юстировке нарушается параллельность соответствующих осей рассматривае.
Рис. 2. мых систем координат, а линия визирования составляет ненулевой угол с осью OZ неподвижной системы координат (рис. 2).
Пространственная ориентация объекта определена, если известны как угловые, так и линейные параметры ориентации /7/. Наиболее часто используются следующие параметры ориентации:
— три угловые координаты объекта, т. е. величины трех последовательных поворотов системы координат X1Y1Z1 относительно собственных осей, в результате которых оси этой системы из согласованного переместятся в текущее после поворота объекта положениетри линейные координаты объекта, т. е. координаты X0, Y0,Z0 точки Oi начала координат системы XjYjZj в осях неподвижной системы координат XYZ.
Вместо линейных координат X0, Y0,Z0 часто используются параметры, определяющие ориентацию линии визирования контролируемого объекта. Под линией визирования в рассматриваемом случае понимается линия, соединяющая начальные точки 0,0ь Тогда к группе параметров ориентации контролируемого объекта относятся:
— текущее расстояние L между объектами (длина отрезка между начальными точками 0,0j систем координат);
— углы ав, рв, ув, между ортом линии визирования и осями координат системы XYZ.
Очевидно, что эта группа параметров ориентации по элементарным геометрическим выражениям пересчитывается в координаты X0, Y0,Z0 начала системы координат XYZi и фактически определяет линейные координаты контролируемого объекта.
Таким образом, пространственное положение полагается определенным, если измерены три линейные и три угловые координаты контролируемого объекта в базовой систем координат.
Особенностью метрологической задачи при рассматриваемых монтажных, буксировочных, юстировочных и др. операциях является малое изменение расстояния до объекта, поскольку его перемещение выполняется или непосредственно в плоскости перемещения S или объект смещается относительно плоскости S на малую по сравнению с дистанцией L величину.
Область научного исследования.
В настоящее время для решения рассмотренных задач используется множество приборов и систем, различающихся по физической природе, принципу действия, схемным решениям и метрологическим свойствам (например, механические — струны и мерные жезлы, электромеханические-уровни и креномеры, гидростатические — ртутные гидронивелиры /5,6,8/).
Опыт метрологического обеспечения операций сборки, юстировки и мониторинговых измерений показывает эффективность использования оптических и оптико-электронных средств. Это объясняется с одной стороны, возможностью реализации бесконтактных измерений в отличие от контактных датчиков: механических, индуктивных, электролитических, и прочих, а с другой стороны, значительно меньшей погрешностью измерения (на порядок и более), чем при использовании других бесконтактных средств, например, радиотехнических систем 111.
Оптические и оптико-электронные измерительные средства могут быть основаны на различных физических явлениях — поляризации, интерференции, дифракциии, а также на основе явлений геометрической оптики. Измерительная система метрологического обеспечения монтажа, сборки, юстировки и т. п. предназначены для работы в цеховых условиях. Это определяет практическую невозможность использования интерференционных и дифракционных систем, чувствительных к возможным вибрациям элементов и температурным градиентам в оптическом тракте /14/. Поляризационные системы даже в одноканальном варианте имеют сложную структуру и значительную стоимость. Это позволяет ограничить область научного исследования только оптико-механическими и оптико-электронными измерительными приборами, основанными на явлениях геометрической оптики.
Определение объекта, предмета и задач научного исследования.
Группы требований, предъявляемых к измерительным средствам.
На практике используется ограниченное количество общих критериев оценки качества методов и средств измерений пространственных координат и вытекающих из них требований. В частности, могут быть сформулированы следующие группы требований.
Требования первой группы определяются критерием метрологических параметров и включают требования по точности, диапазону измеряемых угловых и линейных координат и дистанции измерения (рабочей дистанции до контролируемого объекта).
Особенностью измерений положения перемещаемого объекта при монтаже, буксировке, юстировке является относительно малое изменение дистанции (обычно не более чем на 10% от дистанции в согласованном положении). Это следует из того, что измерительная система ориентируется так, чтобы линия визирования контролируемого объекта в согласованном положении была бы перпендикулярна плоскости S перемещения объекта (рис. 1). .
По рабочей дистанции и диапазону изменения измеряемой величины могут быть выделены характерные классы приборов со следующими параметрами:
— дистанция работы до 50 м, диапазоны измеряемых линейных смещений — до 1000 мм, углов поворота — до нескольких угл. град, (при решении задач!, и 2.);
— дистанция работы до 30 м, диапазоны линейных смещений до 100 мм, углов поворота — до 1 угл. град, (при решении задачи 3);
— дистанция работы до 10 м, диапазоны линейных смещений до 10 мм, углов поворота — до 20 утл. град, (при решении задачи 4).
Допустимая относительная погрешность измерения как трех угловых, так и трех линейных координат лежит в пределах 0,001. 0,0001 от диапазона изменения измеряемой величины.
Требования второй группы определяются критерием особой метрологической характеристики — многокоординатности измерений и включают требования к количеству измеряемых угловых и линейных координат контролируемого объекта.
При решении типовых задач 1.4 перечня необходимо измерение всех шести (трех угловых и трех линейных) координат объекта. Поэтому это требование трансформируется к требованию реализации шести-координатных измерений возможно меньшим количеством измерительных приборов, входящих в состав измерительной системы.
Требования третьей группы определяются критерием функциональных возможностей и включают требования:
— по универсальности, в частности, возможности оперативной перенастройки в соответствии с изменением условий измерительной задачи.
— по возможности автоматизации непосредственно процесса измерения и начальной ориентировки измерительной системы.
Требования четвертой группы определяются прочими критериями: конструкционным, эксплуатационным, производственно-технологическим, стоимостным и включают требования:
— к простоте схемы и конструкции элементов измерительной системы;
— возможности унификации функциональных элементов, узлов и конструкции вцелом;
— сравнительно невысокой стоимости.
В той или иной степени перечисленные группы требований предъявляются при решении практически всех монтажных задач 1.4, однако основными являются требования первой группы. В зависимости от конкретной измерительной задачи к основным могут относиться и требования других групп.
Анализ соответствия требованиям.
Рассмотрим соответствие применяемых в настоящее время приборов рассмотренным требованиям.
1. По первой группе требований. Современные оптико-механические и оптико-электронные приборы в большинстве обеспечивают измерения с требуемой точностью для решения всех задач 1.4 перечня. Однако серийные приборы реализуют измерения линейных и угловых координат в значительно меньшем диапазоне, чем это требуется для решения задач 1,2, а также угловых координат в меньшем диапазоне чем требуется для решения задачи 3.
Требуемого диапазона измерения добиваются увеличением количества отдельных приборов, расположенных в базовой плоскости с некоторым шагом.
2. По второй группе требований. Как серийные оптико-механические и оптико-электронные приборы, так и опытные разработки, как правило, предназначены для измерения или только линейных или только угловых координат. Это приводит к тому, что в итоге шести-координатная измерительная система контроля положения перемещаемого объекта в процессе монтажа, буксировки или юстировки в большинстве схем включает два вида подсистем:
— измеритель линейных перемещений /13/;
— измеритель угловых отклонений /9,10/.
В свою очередь, измеритель линейных перемещений обычно включает два канала — канал для измерения смещений (изменения координат X0, Y0 объекта) в плоскости S перемещения и дальнометрический канал для измерения координаты Z0 или дальности до объекта — см. рис. 1 и рис. 2. Аналогично, измеритель угловых отклонений включает канал измерения коллимационных углов 0], 02 и отдельный канал для измерения скручивания 03. При этом часто совместно используются: как неавтоматические (оптико-механические), так и автоматизированные или автоматические (оптикоэлектронные) каналы.
Таким образом, в большинстве практических схем требование много-координатности измерений формально выполняется, но посредством реализации сложной системы, включающей несколько раздельных измерительных каналов.
3. По требованиям третьей и четвертой групп. Система для решения какой-либо из задач 1.4 включает несколько ряда приборов, различающихся по принципу действия и составу элементов, что не позволяет унифицировать составляющие компоненты, а также делает систему узкоспециальной. Это обстоятельство определяет несоответствие используемых приборов третьей группе требований. Соответственно, усложнение структуры системы, использование большого количества специальных элементов приводит к удорожанию системы, что определяет несоответствие используемых систем и четвертой группе требований.
Таким образом, отсутствуют серийные приборы, позволяющая выполнить с одной стороны, шести-координатные измерения, а с другой стороны, реализовать требуемый в задачах 1 .4 диапазон измерения. Поэтому в практических случаях измерительная система строится по принципу сочетания различных приборов или отдельных измерительных каналов. В результате измерительная система существенно усложняется, что приводит к повышению суммарной стоимости проведения контрольно-измерительных работ, увеличению погрешности измерений из-за субъективных ошибок и накапливаемых погрешностей взаимного базирования отдельных приборов системы, резко снижается производительность измерений вследствие усложнения методики измерений и обработки результатов при использовании разнотипных приборов.
Известны широкодиапазонные универсальные измерительные комплексы, основанные на сканировании пространства прибором с малым диапазоном измерения, однако они имеют высокую стоимость (до десятков тысяч долларов США) и используются только для уникальных работ.
Формулировка объекта, предмета, цели и задачи исследования, методы исследований.
В результате предварительного рассмотрения выявлено, что отсутствует единая измерительная схема, созданная на основе серийно выпускаемых приборов и отвечающая необходимым группам требований.
Вместе с тем появление в последние годы новых высокотехнологичных оптоэлектронных элементов:
— инфракрасных излучающих диодов с повышенной (до десятков милливатт) мощностью и равномерной светимостью;
— широкопольных объективов с малыми аберрациями;
— матричных фотоприемников с малым уровнем шумов и большимболее миллиона — количеством элементов на чувствительной площадке;
— высокопроизводительных сигнальных процессоров и средств сопряжения с ними, позволяет расширить метрологические свойства известных схем и реализовать несложную по структуре, относительно недорогую систему измерения пространственных координат перемещаемых объектов при решении рассмотренных практических задач.
Указанные обстоятельства позволяют предварительно выбрать в качестве объекта исследования оптико-электронные системы определения параметров пространственной ориентации, основанные на явлениях геометрической оптики и реализующие шестикоординатные измерения в рамках одного измерительного канала.
Предметом исследования являются принципы построения измерительной системы, соотношения между параметрами элементов структурной схемы и метрологическими характеристиками системы, составляющие погрешности измерения, их взаимосвязь и влияние на суммарную погрешность измерения.
Целью диссертации является разработка принципов построения, методов расчёта параметров и характеристик, теоретический анализ и экспериментальные исследования системы измерения пространственного положения перемещаемых объектов.
Для достижения указанной цели, необходимо решить следующие задачи.
— проанализировать принципы построения, структуру, основные параметры используемых систем определения пространственного положения по критерию соответствия сформулированным группам требований.
— по результатам анализа используемых систем разработать принципы построения и методики расчета параметров оптимальных оптико-электронных систем измерения параметров пространственной ориентации (ОЭС ИППО) перемещаемых объектов;
— разработать принципы построения и реализовать компьютерные модели для исследования ОЭС ОППО на системотехническом уровне;
— на основе компьютерной модели выполнить экспериментальные исследования соотношений между параметрами элементов ОЭС ОППО и ее метрологическими параметрами (диапазон измерения, рабочая дистанция, точность);
— на основе компьютерной модели выполнить экспериментальные исследования влияния основных составляющих погрешности измерения ОЭС ОППО на суммарную погрешность;
Методы исследования. В теоретической области предполагается использовать соотношения геометрической оптики, векторно-матричный метод расчёта и разработанные на их основе методики исследования соотношений между параметрами измерительной системы.
В экспериментальной области при исследовании соотношений между параметрами измерительной системы, анализе алгоритмов измерения пространственных координат используются детерминированных и имитационные компьютерные модели функциональных элементов измерительной системы. Модели реализованы на основе компьютерной технологии MathCAD и исследуются методом статистических испытаний (метод Монте-Карло).
Обработка и оценка результатов эксперимента с компьютерными моделями проводятся по общепринятым методикам.
Структура диссертационной работы.
Диссертация включает Введение, четыре Главы и Заключение.
ЗАКЛЮЧЕНИЕ
.
1. Рассмотрены основные принципы построения оптико-электронных систем измерения параметров пространственной ориентации объектов при монтаже, юстировке оборудования, буксировке объектов, мониторинге деформаций, выявлены группы требований к ним.
2. В результате аналитического обзора разработана классификация ОЭС указанного назначения, выявлены два основных типа систем — с раздельной и единой измерительной схемой. Показано, что наиболее перспективными для решения рассматриваемых измерительных задач являются системы с единой измерительной схемой.
3. Анализ ОЭС с единой измерительной схемой выявил перспективность ОЭС двух видов — упорядоченного и смешанного. Сравнение метрологических параметров этих видов ОЭС показал, что системы упорядоченного вида имею более сложную структуру, в то время как системы смешанного вида проще, но используют сложный итерационный алгоритм измерения.
4. Выполнено исследование зависимости чувствительности измерения линейных и угловых координат объекта от параметров элементов структурной схемы ОЭС. Сравнение ОЭС этих двух видов по критерию чувствительности измерения групп параметров ориентации позволило установить соответствие между различными измерительными задачами и оптимальной для их решения схемой ОЭС.
5. Исследование составляющих погрешности измерения ОЭС двух видов выявило наиболее значимые первичные погрешности звеньев измерительной цепи, определяющие точность измерения, что позволило выработать рекомендации по повышению точности измрения.
5. Для проверки достоверности полученных теоретических результатов разработаны имитационные модели ОЭС на уровне структурной схемы. С использованием моделей выполнены исследования влияния параметров измерительной задачи (дальность, перемещения, повороты объекта) на точность.
ОЭС. Также получены зависимости, определяющие суммарную погрешность измерения ОЭС от величин отклонений параметров звеньев измерительной цепы.
Полученные данные моделирования подтвердили правильность теоретических разработок принципов построения ОЭС измерения параметров пространственной ориентации перемещаемых объектов.
Результаты диссертации отражены в следующих публикациях.
1. Чжан Хань, Э. Д. Панков. Оптико-электронные датчики углов с неизменной статической характеристикой. Тезисы докладов международного научно-технического семинара «Сборка в машиностроении и приборостроении», Брянск, БГТУ, 2001.
2. Чжан Хань, Э. Д. Панков. Пути повышения точности и расширения диапазона измерения опико-электронных многокоординатных угломеров. Тезисы докладов международной молодежной научной конференции «XXVII Гагаринские чтения», М., МАТИ, 2001.
3. Чжан Хань, Э. Д. Панков. Трехкоординатные оптико-электронные угломеры. Тезисы докладов международной молодежной научной конференции «XXVII Гагаринские чтения», М., МАТИ, 2001.
4. Чжан Хань, Э. Д. Панков, А. В. Прокофьев, А. Н. Тимофеев. Автоколлимационная система с оптической равносигнальной зоной для измерения поперечных смещений объекта. Тезисы докладов XXXI научно-технической конференции профессорско-преподавательского состава ИТМО, СПб, ИТМО, 2002.
5. Чжан Хань, Э. Д. Панков. Оптико-электронная система стыковки двух кооперируемых объектов. Тезисы докладов XXXI научно-технической конференции профессорско-преподавательского состава ИТМО, СПб, ИТМО, 2002.
— 1176. Чжан Хань, А. В. Нужин, Э. Д. Панков. Широкодиапазонные оптико-электронные. автоколлимационные угломеры, ИТМО, СПб, 2002. Деп. В ВИНИТИ, 14.02.02, N315, 2002.
7. Чжан Хань, Э. Д. Панков, И. А. Коняхин, А. Н. Тимофеев. Автоколлимационные системы с оптической равносигнальной зоной для контроля поперечных смещений объекта. ИТМО, СПб, Научно-технический вестник, N5, 2002.
Разработанные методики расчета параметров и компьютерные модели на их основе внедрены в отраслевой лаборатории кафедры оптико-электронных приборов и систем ГУ ИТМО и учебном процессе ГУ ИТМО .
Материалы диссертационного исследования могут использоваться в научно-исследовательских, конструкторских и проектных организациях при разработке оптических и оптико-электронных угломеров, реализующих автоколлимационный метод измерения.
Список литературы
- Баран П.И. Геодезические работы при монтаже и эксплуатации оборудования.-М. .Недра, 1990. -233 с.:ил.
- Неумывакин Ю.К. Автоматизация геодезических измерений в мелиоративном строительстве.- М., Недра, 1984.
- Кирочкин Ю.И., Журавлев И. А., Мухин Б. Л., Уланов В. А. Общие принципы геодезического обеспечения сооружения ускорительно-накопительного комплекса (УНК).-М., типография Института Физики высоких энергий, 1991.
- Щеглов П.В. Проблемы оптической астрономии. М.: Наука, 1980.271 с.
- Карапетян Б.К. Колебание сооружений, возведенных в Армении. -Ереван: Айастан, 1987 г. -250 с.
- Беликов С. И. Докукина Н.А. Допуски, посадки и технические измерения в производстве летательных аппаратов. М.: Оборонгиз, 1963. -291 с.
- Зацаринный A.B. Автоматизация высокоточных инженерно-геодезических измерений. М. Недра, 1976.
- Сытник B.C. Лазерные геодезические приборы в строительстве. М, Стройиздат, Будапешт, Мюсекл, 1988.
- Голубовский Ю. М., Пивоварова Л. Н. Фотоэлектрические автоколлиматоры.// Оптический журнал. 1992. No9.
- Афанасьев В. А., Жилкин А. М., Усов В. С. Автоколлимационные приборы. -М.: Недра, 1982.11. 22-th Aerospace Sciences Military Conferenc 1985. January AAS 85 027 Autonomous spacecraft rendezvous and docking. John C. and Bonni J. Almand
- Takeo Konade, Naruhiko Asada. Noncontakt visual tree-dimensional ranging devices. SPIE, 1981, Vol. 283, p. 48 — 53.
- Вагнер Е.Т., Митрофанов В. Н., Барков В. Н. Лазерные и оптические методы контроля в самолето строении. М.: Машиностроение, 1977 176 с.
- Высокоточные угловые измерения / Под ред. Ю. Г. Якушенкова, М.: Машиностроение, 1987 480 с.
- Пат. 7 345 703 (Франция) Appareal de mesure sans contact de deplacements dans un espace tridimensionnel / Bernard Marcel Geoffroy. N2255611- Опубл. 18.07.75. МКИ GOI b 11 / 16 Прибор для безконтактного измерения перемещений в трехмерном пространстве.
- Коняхин И. А. Панков Э.Д. Трехкоординатные оптические и ОЭ угломеры. М.: Недра 1991.
- Пат. 3 375 750 (США) Three axies optikal aligment device / Ellis C.R., Barker A.L. Заявл. 15.09.69 N138525- Опубл. 2.04.68 МКИ. GOI с 6 / 01- НКИ 88−14.- Трехосный оптический прибор для выравнивания.
- Пат. 3 816 000 (США) Three axies aligment means / Fiedler G.C. Заявл. 24.01.72 N219997- Опубл. 11.06.74 МКИ. GOI b 11 / 26- НКИ кл 356−152. -Трехосное выравнивающее устройство.
- Bohlin J. D. Simultaneous Optical Monitoring of Angular and Translation Alignment. Applied Optics, 1972, Vol. 11, N 3, p 961 — 962.
- Salomon P.M., Gross W.S. Microprocessor controled CCD Star Tracker — AIAA Paper, 1976 N116, pi.
- Проектирование оптико-электронных приборов: учебное пособие для студентов втузов / Под ред. Ю. Г. Якушенкова, М.: Машиностроение, 1990−432 с.
- Тудоровский А.И. Влияние ошибок изготовления отражательных призм на ход лучей в них. Журнал технической физики, 1934, т. 5, вып. 4, с. 719−747.
- Дьяконов В.П. Система MathCAD: Справочник. М.: Радио и связь, 1993 — 128 с. Саутин С. Н. Пунин А.Е. Мир компьютеров и химическая технология. — Л.: Химия, 1991. — 144 с.
- Андреев A.JI. Коняхин И. А. Методические указания к выполнению УИРС. Ленинградский институт точной механики и оптики, 1986.
- Парфенов В.Г. Регрессионный и корреляционный анализ. Обработка результатов наблюдений при измерениях. /Учебное пособие / Ленинградский институт точной механики и оптики, 1983.
- Парфенов В.Г. Статистические методы исследования в оптическом приборостроении. / Учебное пособие / Ленинградский институт точной механики и оптики, 1980.
- Андреев А.Л., Коняхин И. А., Коротаев В. В., Мусяков В. Л., Панков Э. Д., Тимофеев А. Н. Проблемы создания оптико-электронных систем для определения взаимного положения разнесенных в пространстве объектов. Оптический журнал, N 8,1995, с.8−12.
- Davis J. Consideration of atmosferic turbulence in laser design //Appl.Optics. 1966.V.5, N1. P.139−147.