Лингвистический подход в ситуационном управлении технологическими процессами
Прогнозирование осуществляется с помощью некоторого решателя, функционирование которого заключается в последовательном просмотре прогнозирующих правил. Каждое правило проверяется на выполнение определенного условия. Если условие выполняется, то определяются следующее состояние объекта управления (прогнозирования) и требуемые на него следствия, полученному результату присваивается вес, результат… Читать ещё >
Содержание
- 1. О СЕМАНТИКЕ УПРАВЛЕНИЯ
- 1. 1. Управление сложными технологическими процессами
- 1. 2. Управляемый объект
- 1. 3. Устройство управления
- 1. 4. Среда и управление
- 1. 5. Управление и его характеристики
- 2. ПЕРВИЧНАЯ СТРУКТУРА УПРАВЛЕНИЯ
- 2. 1. Чувствительные органы и аппаратура поддержки
- 2. 2. Функции аппаратуры поддержки
- 2. 3. Регулирующая функция датчика
- 2. 4. Обобщенная структура контура управления
- 3. АНАЛИЗ СИГНАЛОВ КОНТУРА УПРАВЛЕНИЯ
- 3. 1. Постановка задачи моделирования сигналов
- 3. 2. Выбор узлов аппроксимации непрерывных функций
- 3. 3. Построение формулы Эрмита для интерполирования вперед
- 3. 4. Конструктивные способы экспоненциальных приближений
- 3. 5. Способ дискретизации непрерывных функций
- 3. 6. Унификация вычислительных схем при аппр оксимации
- 4. ПРОГНОЗИРОВАНИЕ В СТРУКТУРЕ УПРАВЛЕНИЯ
- 4. 1. Общие вопросы прогнозирования
- 4. 2. Лингвистическое прогнозирование
- 4. 3. Функциональный источник автоматизации
- 4. 4. Язык как структурная основа автоматизации
- 5. ЛИНГВИСТИЧЕСКОЕ МОДЕЛИРОВАНИЕ ПРИ УПРАВЛЕНИИ
- 5. 1. Причинная модель
- 5. 2. Свойства модели
- 5. 3. Реализация причинной модели
- 5. 4. Формальное описание модели
- 6. СИТУАЦИОННОЕ УПРАВЛЕНИЕ НА ОСНОЕ ПРОГНОЗИРУЮЩЕГО ТЕКСТА 244 6.1. Составление прогнозирующего текста
- 6. 2. Исполнение процедуры прогнозирования
- 6. 3. Формализация прогнозирующего текста
- 6. 4. Формирование алгоритма прогнозирования
- 7. ПОСТРОЕНИЕ СИСТЕМ АВТОМАТИЗАЦИИ ТЕХНОЛОГИЧЕСКИМИ ОБЪЕКТАМИ С ИСПОЛЬЗОВАНИЕМ ЛИНГВИСТИЧЕСКИХ СРЕДСТВ
- 7. 1. Инструментальные лингвистические средства автоматизации
- 7. 2. Система автоматизации испытаний трещиностойкости 320 анизотропных материалов
- 7. 3. Автоматизированная система управление потребления 350 энергоресурсов
- 7. 4. Управление и контроль состояния теплосетей 357 Основные результаты работы
- Список литературы
- ПРИЛОЖЕНИЕ Адаптивный специализированный язык контроля и управления
Лингвистический подход в ситуационном управлении технологическими процессами (реферат, курсовая, диплом, контрольная)
о.
Качество функционирования технологических процессов обуславливается многими факторами и редко полностью удовлетворяет потребителя. Почти всегда можно указать хотя бы один параметр качества функционирования, значение которого оставляет желать лучшего. Действия человека направлены либо на удержание достигнутого уровня качества функционирования технологического процесса или производства в целом, либо на его улучшение. Отсюда вытекает одна из наиболее существенных причин обращения к проблематике автоматизации [1−10], когда технологический процесс обрастает различными средствами автоматизации, устройствами управления и регулирования, способствующими улучшению ее функционирования и повышению качества выпускаемой продукции. Всякий раз, когда необходимо улучшить качество функционирования, [1−9, 12, 13], можно (и нужно) ставить и решать задачи автоматизированного управления, которые стали неотъемлемой частью более широких проблем, связанных с общими закономерностями функционирования технических систем.
До настоящего времени не теряют своей актуальности вопросы о том, что измерять, посредством чего проводить эффективные воздействия на объект, что может быть выбрано в качестве кирпичиков управляемого объекта и управляющей системы. Практическое применение доступных технических средств автоматизации управления и контроля [14−18] регламентируется замкнутостью и жесткостью структуры, неспособностью к объединению функций и аппаратуры, практически полным отсутствием унификации взаимодействия системы нижнего уровня с ее более высокими ярусами.
Одна из самых важных особенностей многих современных систем управления — сложность и неопределенность объектов управления. Установилось даже такое мнение, что если объект прост и его математическое описание полностью известно, то изучение поведения системы управления таким объектом должно вкладываться в рамки классической теории автоматического регулирования. Если же объект сложный, да еще его математическое описание либо вообще неизвестно, либо известно не полностью, то управлением такими объектами должна заниматься кибернетика. Сложность объектов и их неопределенность не так-то просто оценить. К сожалению, сложные объекты существуют совсем не для того, чтобы ими управляли. Их существование и функционирование полезно неза4 висимо от того, умеем ли мы их хорошо описывать или хорошо ими управлять. Природа не опасается математических трудностей, она существует вне математики, вне зависимости от нашего понимания и то, что она создает, далеко не всегда вмещается в рамки хорошо изученных математических методов и концепций. Естественным является состояние, когда знания исследователя об объекте управления ограничены, его математические конструкции не полностью определяют этот объект, то есть исследователь очень часто встречается с плохо определенными объектами, о которых пойдет речь.
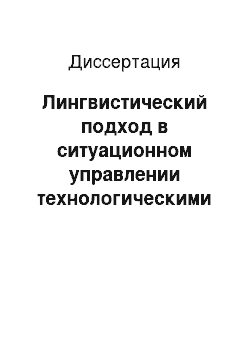
Целесообразно выделить три партнера автоматизированного управления (рис. В1): объект управления, управляющую систему, внешнюю среду, в которой взаимодействуют объект и управляющая система. Для каждого из партнеров предварительные оценки при управлении основываются на трех взаимосвязанных факторах: соответствием ожидаемых закономерностей функционирования партнера его реальному поведениюполнотой восприятия сигналов от партнеровправильностью формирования сигналов для воздействия на партнера. Ошибки в оценках их функционирования определяются неадекватностью модели, неадекватностью восприятия и несоответствием содержания управляющего сигнала объекту или окружающей среде. Адекватность относительна и носит ситуационный и временной характер. Рационально сделать акцент не столько на обеспечении априорной адекватности модели или сигналов, сколько на проработке подхода по корректированию начальных моделей или воспроизводимых качеств сигналов по результатам активного взаимодействия партнеров при функционировании автоматизированных систем управления (АСУ).
Суть лингвистического подхода к автоматизации управления заключается в следующем. Партнеры автоматизированного управления рассматриваются как равноправные. Структура, функционирование, внешние и внутренние связи и взаимодействия, законы развития для каждого из партнеров описываются с использованием лингвистических средств (на соответствующем языке). Создаются средства автоматизации языкового описания, в том числе и средства реализации языковых моделей.
Практика построения систем управления (СУ) показывает значительную зависимость контура управления от полноты восприятия сигналов от объекта и от содержания формируемого для воздействия на объект сигнала, что полностью.
Объект управления (ОУ).
Влияние ОУ на ЛС.
Воздействие.
ЛС на ОУ ^.
Внешняя локальная среда <ЛС).
Управляющ* воздействия 1.
Измеряемые параметры.
Влияние УС на ЛС!
Воздействие ЛС на УС.
Управляющая система (УС).
Модель ОУ на языке описания структуры и функционирования ОУ.
Описание влияния ОУ на ЛС.
Описание.
ТЩцеиствЖ1ТС" .
Модель ЛС на языке описания структуры и функционирования ЛС описание управляющих воздействий на ОУ описание измеренных параметров описание влияния УС на ЛС описание воздействия ЛС на УС.
Модель УС на языке описания структуры и функционирования УС.
Представление об объективной реальности.
Объективная реальность.
РисВ-1- Лингвистический подход в ситуационном управлении технологическими процессами и объектами определяется качеством восстановления по ограниченному множеству признаков непрерывных физически фиксируемых сигналов в реальном времени управления. В сложных технологических процессах восприятие сигналов от объекта и содержание формируемого для воздействия сигнала зачастую представляется в виде языкового выражения. Превентивное оценивание степени воздействия управляющих сигналов на объект выразится в форме прогнозирования, а потребность введения прогнозирования в структуры управления делает актуальными проработку формализации прогнозирующих текстов и выбор технической основы для их реализации. Восстановление и прогнозирование в реальном времени — это не только путь к эффективным методам автоматизированного управления, но и к новым структурам СУ с явно выраженным составом интеллектуального оборудования. С таких позиций способность к интегрированию и унификация становятся необходимыми и существенными вопросами создания СУ.
Развитие прикладных методов теории искусственного интеллекта и теории нечетких моделей динамических управляющих систем способствовало возникновению нового направления интеллектуальных промышленных систем автоматического управления. Анализ реальных систем управления на основе идеологии нечетких моделей регуляторов (контроллеров) и результаты опытной эксплуатации в промышленности привели к разработке моделей нечетких систем ситуационного управления, дружественных по отношению к человеку. В работе рассмотрены семантические основы создания таких систем с позиций анализа объекта управления, устройства управления, среды, в которой протекает управление, и непосредственно управления. Предложен вариант его структуры в сочетании с экспертной технологией принятия решения.
Цель работы. С использованием единого подхода к построению систем ситуационного управления технологическими процессами создать методологию применения специализированных языков как средства описания системы (объ-ект-управляющая система-среда) и реализации управления, которая предполагает выбор моделей источников первичной информации, средств и методов ее хранения и восстановления и переход к экспертной технологии лингвистического прогнозирования, допускающей наличие нечеткого предиката, присутствие недостоверности и развитие прогнозирования в реальном времени.
Отсюда вытекают следующие основные задачи работы. Предложить методологию построения моделей в системах ситуационного управления технологическими процессами на основе применения языков как средств описания и оценки ситуации, структуры и прогнозирования поведения как внутри самой системы управления, так и при ее взаимодействии с внешней средой.
Обосновать представления о первичных структурах управления и их моделях. Сформулировать принципиально необходимые свойства, которые характеризуют интеллектуальные качества датчиков, как обобщенных средств представления информации о системе объект-управляющая система-среда.
Исходя из возможного представления в виде языкового описания информации о сложном технологическом процессе, выявить общие закономерности и реализовать методы и алгоритмы дискретизации, хранения и восстановления сложных сигналов в системе управления при отсутствии их аналитического описания и необходимости представления не только значений сигнала, но и характера его изменения (производных до заданного порядка включительно).
Выявить роль и место прогнозирования в структуре управления, особенности лингвистической реализации прогноза, значение прогнозирования и языка как функционального источника и структурной основы автоматизации.
Сформулировать экспертную технологию управления, предполагающую путь прямой лингвистической реализации выраженных естественными языками моделей и допускающую наличие нечеткого предиката, присутствие недостоверности и развитие процесса прогнозирования в реальном времени.
Разработать и обосновать средства и методику построения лингвистических моделей в соответствии с экспертной технологией при ситуационном управлении.
Предложить технологию реализации управления на основе прогнозирующего текста (причинной модели), доказать и практически обосновать техническую реальность создания реализующих такую модель управления устройств и возможность встраивания прогнозирования в структуру управления как программной системы реального времени.
Разработать структуру и реализовать инструментальные средства создания специализированных языков пользователя и соответствующих им программных систем.
Показать и подтвердить жизненность лингвистического подхода на примерах построения автоматизированных систем управления и контроля сложными технологическими процессами.
Решение сформулированных задач предполагает проведение анализа управления сложными технологическими процессами и вопросов его автоматизации (первая глава). Управление рассматривается как взаимодействие управляемого объекта, управляющего устройства и среды, при котором происходит целенаправленное и прогнозируемое изменение поведения управляемого объекта в рамках его возможного функционирования. Отсюда вытекает зависимость задач управления от общих целей функционирования объектов, и определяется существенностью отношений более высокого порядка, чем элемент-элемент.
Различают малые и большие управляемые системы. Большие системы не сводятся к описанию одного из их элементов с указанием общего числа таких элементов. Если алгоритм управления задан, задача управления решается традиционными способами. Отсутствие алгоритма является существенной характеристикой управления большой системой, отношения в которой можно адекватно выразить на языке их описания. Если этот язык не сводим к алгоритмическим, то желание получить алгоритм управления может остаться нереализованным, что не исключает возможность организации требуемого управления.
Объект управления, как некая объективная реальность со своими свойствами и особенностями, характеризуется тремя взаимно обусловленными составляющими: веществом, энергией и организацией, по которым и проводится управление. Можно выделить следующие характеристики объекта: элементную базу, внутренние взаимоотношения объекта, состояния элементов, отношения между элементами, внешние взаимоотношения, взаимоотношения различных типов отношений, язык имитации функционирования объекта, язык, отражающий информационно-энергетическое взаимодействие объекта с внешним миром, виды энергий, развивающихся внутри объекта и взаимодействующих с внешним миром, закономерности функционирования объекта, законы развития объекта, условия, при которых реализуются законы развития и функционирования.
Согласовать управляющее устройство и объект можно лишь при наличии модели объекта и управляющего устройства, языка имитации, языка моделирования в реальном времени, средств формирования моделей, средств определения конкретных значений обобщенных параметров, средств выделения и изменения состава обобщенных параметров объекта. Функциональные части требуют наделить управляющее устройство свойством построения подходящих для управления моделей, способностью моделировать процессы управления, свойством выделять обобщенные существенные параметры объекта.
Среда — важный компонент всякого взаимодействия материальных объектов. От попыток грубого учета влияния среды приходится отказываться. Природа взаимодействия объекта со средой ведет к множественности ее моделей. Построить такие модели априорно практически невозможно. Возникает необходимость разработки средств оперативного формирования, коррекции и изменения моделей среды в системе управления в реальном времени. Учет среды требует внесения: моделей среды, средств формирования моделей среды в зависимости от конкретных обстоятельств, языков представления и корректировки моделей. Можно выделить следующие функциональные части системы управления.
Существенные параметры, которые участвуют в формировании управляющих воздействий и определяют их значения и по которым оценивается качество функционирования. Любой объект управления определяется набором существенных параметров, априорное формирование состава которых затруднено.
Средства формирования моделей могут быть представлены в виде некоторой взаимодействующей группы специальных объектов, лингвистических конструкций и языка формирования, определенного программно — аппаратного комплекса. В моделях можно выделить аналог лингвистических конструкций, из которых они формируются, и аналог языка, осуществляющего их формирование.
Языки моделирования и имитации являются центральными событиями в структуре управления. В них вырабатываются необходимые управляющие воздействия, оценивается качество управления, проводится экспериментирование на моделях объекта, среды и устройства управления, принимаются превентивные меры защиты от нежелательных последствий управления. При ситуационном управлении технологическими процессами построение языка имитации и его семиотической системы реализуется на основе известных принципов: дискретности, псевдофизичности, универсальности, порождаемости, моноплановости, иерархичности, целесообразности, расширяемости, макроструктурности.
Выявлению обобщенной первичной структуры управления посвящена вторая глава. Если рассматривать процессы с позиций их структурной и функциональной сложности, можно говорить о воздействии объекта на любой другой взаимодействующий с ним объект. Для восприятия простых или сложных сигналов воздействия необходима и соответствующая организация обобщенных источников первичной информации, назовем их традиционно — датчиками. Если функции измерительной аппаратуры и преобразователей возложить на предметно-математические модели, то для обобщенного датчика сложного сигнала можно создать унифицированную цепочку: чувствительный элемент — микроЭВМ и унифицировать структуру датчика по типу чувствительного элемента или по типу микроЭВМ. Точность измерения определяется двумя видами погрешностей: погрешностью аппроксимации нелинейного преобразования, регулируемой при использовании полигонального приближения, динамической погрешностью, регулируемой благодаря организации параллельных вычислений при сохранении их эффективности за счет пространственного распределения вычислительной мощности и независимости исполнения в каждой пространственной части.
Дополнение традиционных методов работы с нелинейностями компьютерной цепочкой измерений может обеспечить: стабильные показатели производительности в широком диапазоне точности, регулируемые показатели точности и производительности, качества адаптивности чувствительному элементу, аппаратную унификацию по тракту обработки сигнала от чувствительного элемента до вида возможного его целесообразного использования. Переход к дискретному представлению величин, несущих информацию об объекте, позволяет контролировать тракт прохождения сигнала после чувствительного элемента. При этом обеспечивается классификация измеряемых значений в реальном времени, автоматическое принятие решения о конкретном значении выходной величины и характере ее поведения, формализация нечетких значений. Эти возможности обеспечиваются степенью миниатюризации микроЭВМ и уровнем независимости сложности их организации (структуры и архитектуры) от решаемых задач и сложности обрабатываемых сигналов.
Говоря о моделировании источников первичной информации, можно отметить, что сложность структуры датчика обуславливается следующими факторами. Во-первых, чтобы предоставить системе управления сигналы с объекта, несущие о нем информацию требуется модель объекта с целевых позиций датчика, модель самого датчика, и модель среды. Во вторых, отклонениями в функционировании и объекта и датчика, вызванными нецелевым функционированием структуры объект — датчик. Необходима оценка обстоятельств отклонений от закономерностей целевого функционирования. В-третьих, поддержкой условий, обеспечивающих сохранение баланса объекта со средой при его функционировании совместно с датчиком. В-четвертых, реализацией целевых интерфейсных функций датчика. В зависимости от характера и объема информации, передаваемой датчиком в более высокие уровни иерархии управления, могут потребоваться различные языковые представления.
Отмеченные факторы по-разному влияют на конкретные схемы датчика, вступая друг с другом в сложные отношения. Структура обобщенного датчика соответствует структуре контура управления, и процессы, протекающие в этой структуре, вкладываются в обычные границы структуры управления. В функционирующей технической системе управления датчик — это первичная структура, которая состоит из нескольких замкнутых контуров управления. Основу каждого контура определяет вычислительная мощность датчика, образующая в его многоконтурной структуре распределенную вычислительную мощность. Структурная сложность датчика определяется аппаратурой реализации распределенной вычислительной мощности.
Методы обработки сигналов посредством ЭВМ позволяют наделить датчик функциями восприятия содержания объекта, возможностями языкового моделирования и распознавания. Можно говорить о переходе к разработкам интеллектуальных датчиков, для которых характерны: наличие обратной связи между датчиком и объектом, способность датчика регулировать свои реакции на нецелевые воздействия объекта и способность датчика отображать не только внешние проявления объекта, но и его структурные особенности. Интеллектуальные возможности датчика обеспечивает конструктивная обусловленность распределенной вычислительной мощности и способности датчика к сохранению сложного в пространстве и времени сигнала. Отсюда становится ясно, насколько важно иметь надежные методы анализа сигналов контура управления.
Исследованию представления информации (в том числе и экспертной) в виде сложных сигналов на этапе моделирования и функционирования систем управления технологическим процессом посвящена третья глава. Повышение интереса к методам теории аппроксимации объясняется тем, что их применение создает предпосылки для полной формализации принятия решений при управлении тех процессов, которые базируются как на аналитической, так и на эмпирической информации. Возрастание количества типов решаемых в интегрированных АСУ задач и численных методов значительно увеличивает сложность вычислений и время, требуемое для их осуществления. Развитие вычислительной математики для потребностей практики управления выдвигает в качестве одной из первостепенных проблему унификации алгоритмов, вычислительных схем и принципов решения различных задач в реальном времени АСУ.
Одной из важных задач, связанных с передачей и кодированием сообщений, является задача сжатия данных и восстановления функциональных зависимостей, от решения которой в значительной степени зависит эффективность проектируемых систем и устройств управления. При разбиении функции происходит определенная потеря качества кривой. Поэтому при самом эффективном методе ее восстановления данному набору точек присуща некоторая погрешность. Для практики управления представляет интерес также величина погрешности, характеризующей степень приближения заданной производной восстанавливаемой функции. Даже при высокой точности приближения значений функции погрешность аппроксимации производных может быть значительной. Задача дискретизация — восстановление представляет собой проблему приближения многих функциональных зависимостей. Описан алгоритм дискретизации, который дает возможность повысить информативность набора точек и более полно использовать информацию после дискретизации функции.
В результате действия предложенной схемы приближение осуществляется непрерывной кусочно-линейной аппроксимацией сложного сигнала и определяется набор характеризующих его точек, состоящий из точек перегиба, экстремальных и точек экстремума для функций ошибок. Это дает возможность непрерывно регулировать погрешность приближения в пределах заданных интервала точности и промежутка аппроксимации. Предложен алгоритм восстановления сигналов на основе полиномиальных и экспоненциальных базовых функций, который можно считать достаточным для описания исходной функции и ее производных до заданного порядка, в соответствии с требованиями дискретизации.
Выбранный функциональный подход является правомерным и удобным для эффективного практического использования. Он создает предпосылки для решения проблем дискретизации, хранения, передачи и восстановления информации по единой схеме. Предложенные методы и алгоритмы могут быть эффективно применены при построении и описании функционирования интегрированных АСУ. Особенно наглядно это происходит, когда управление и структура самой системы определены средствами специализированного языка, который, помимо описания оборудования приборов и сигналов системы, обладает возможностями обработки и оценки результатов измерения параметров объекта за счет значительной вычислительной мощности. Примером такого языка может служить разработанный нами адаптивный специализированный язык контроля и управления АС Я. Поскольку язык АСЯ обладает значительными вычислительными возможностями, то получаемая информация о состоянии объекта управления может быть представлена в виде, необходимом для принятия решения при прогнозировании, когда важно знать не только значения некоторых параметров в момент принятия решения, но и тенденции их изменения (производные).
Четвертая глава посвящена роли прогнозирования в структуре управления. Прогнозирование рассматривается как научно обоснованное суждение о будущих состояниях объекта управления и (или) об альтернативных путях достижения этих состояний. Необходимость прогнозирования вызвана тем, что будущие состояния объекта имеют большое значение для решений, принимаемых нами в настоящий момент. Имеет место неопределенность, и задача человеканахождение оптимального пути ее устранения. Известны способы прогнозирования, основанные на аналогиях, эвристиках и статистиках. Более естественен путь прямой лингвистической реализации моделей, выраженных естественными языками. Изучение роли языка и процедур прогнозирования при управлении показало, что прогнозирование представляет собой систему, основанную на нечетких алгоритмах, — нечеткую систему. Интеграция механизма вывода и декларативных знаний в виде нечеткого алгоритма позволит привести к единообразному решению различных задач прогнозирования.
Автоматическое управление технологическими процессами без участия человека возможно только в рамках оценки отдельных показателей качества их эксплуатации. Уровень автоматизации определяется правильностью понимания ее функционального источника — цели. Непосредственная деятельность человека в системе управления обуславливается и направляется многообразием формирования ожидаемых результатов. Назначение человека состоит в восприятии от внешней среды новых знаний, их пополнение и уточнение, проведение экспертных оценок по классификации полученных знаний, установление принадлежности новых знаний к имеющимся группам. Успешное функционирование СУ без систематически проводимых экспертных мероприятий проблематично.
Представление цели в виде объективно существующих отношений, определяющих направленность СУ, означает адекватность цели закономерностям функционирования и структуре объекта. Такое целеполагание возможно и наиболее адекватно, когда для описания используют естественные языки. Известные многочисленные формальные языковые системы по своим возможностям близки к естественным языкам и допускают возможность автоматизации экспертной технологии управления, практическая реализация которой связана с трудностями описания на естественном языке технологических процессов, доказательства адекватности описания, получения новых знаний.
Прогнозирование основано на оценке человеком закономерностей функционирования СУ. Степень исполнения системой своей целевой функции является наиболее полным критерием оценки качества прогнозирования. Эффективному использованию такого критерия мешают сложности в распределении целевой функции по элементам системы. Шаг прогнозирования, глубина ретроспекции и уровень обобщения понятий могут быть различными для различных ее элементов. Сформированное человеком множество знаний отражает и объект, и среду, и их взаимодействие. Поэтому прогнозирование можно определить и в более узком плане, как формирование множества (ожидаемых) знаний с последующим выбором желаемого. За человеком остается выбор адекватных во времени, пространстве и ситуации языковых конструкций для восприятия лингвистических структур, идущих от объекта в плане реализации конкретного целепо-лагания. Человек получает знания только тогда, когда есть язык и есть некий уникальный аппарат соотнесения. Можно говорить о значительных объемах принципиально различных знаний об исследуемом объекте. В любом случае, знания обусловлены языком. Их можно отнести к новым знаниям только в плане ожидаемых из определенного множества результатов.
Представление знаний связано с разработкой моделей предметной области, адекватно отображающих понимание человеком реального мира. Правильно выбранный способ представления знаний обеспечивает эффективность системы прогнозирования и саму возможность ее создания. Известные направления по формализации знаний базируются на исчислении предикатов и представлениях о нечетких множествах. При применении указанных теорий на практике значительная нагрузка ложится на инструментальные программные средства. Эффективность и гибкость такого инструментария определяет успех использования методологии нечетких алгоритмов и решение задач прогнозирования.
В пятой главе рассмотрены вопросы лингвистического моделирования при управлении. Согласно предложенной тактике прогнозирования структурно различают состояния, ситуации и события. Состояния — систематически наблюдаемое свойство структуры управления. Ситуации — реализованные или ожидаемые предыстории состояний за некоторый временной промежуток. Событиявоздействия, оказываемые на функционирующий объект, который допускает существование пространственно-временного интервала для оценки состояний и ситуаций. Состояния — элементарные кирпичики, из которых формируются ситуации. База знаний о состояниях со своей внутренней структурой — важнейший компонент прогнозирования. Уровень общности прогноза и его семиотических средств выражения зависит от степени обобщенности представлений о состоянии и семиотических средств их выражения. По факту получения и выполнения конкретного прогноза и события существует языковая конструкция, которая объединяет их и определяет реальные прогнозы и события.
Прогнозирующей процедуре характерно наличие многих предикативных единиц, образующих звенья единой подчинительной цепи со значительной глубиной синтаксической перспективы. Ввиду семантической недостаточности глаголов, крайне сложно обойтись только простыми предложениями {подлежащее — сказуемое — дополнение). Самые простые предложения — конструкции с придаточными причины. Усложняя типаж синтаксических связей, получим трансформацию прогнозирующего текста от простого к более семантически насыщенному. Целесообразнее исходить из простейших текстовых структур, образованных с использованием причинно-следственных придаточных, и в простейшем случае прогнозирующий текст, или причинная модель прогноза может представлять собой перечень простых предложений. Такая система предложений является простой в структурном аспекте и допускает стратегию смыслового расширения прогнозирующих текстов, например, введением в каждое предложение большей глубины синтаксической перспективы. Синтаксическая простота прогнозирующего текста в семантическом плане сочетается с достаточно богатыми возможностями для формальных применений. Левые части могут иметь отношение к объекту управления, локально-организованной среде, человеку, как участнику, и нести структурную нагрузку по интерпретации текста, по изменению порядка восприятия текста и его структуры. Правые части могут ориентироваться объектно либо структурно на сам прогнозирующий текст.
Прогноз требуется лишь при наличии неопределенности знаний об объекте с целью выполнения определенного комплекса действий. Значительно меньшая смысловая нагрузка падает на прогнозирование, если имеются исчерпывающие знания. Возможности маневра при прогнозировании предоставляет неопределенность глубины ретроспекции. При неудовлетворительном прогнозе возможно изменение выбранной глубины ретроспекции. При большой длине прогнозирующего текста наблюдается его прагматическая многозначность и семиотическая невыразимость. Возрастают трудности идентификации модели из-за многообразия проявлений и вариантов интерпретации уровня смыслового обобщения терминов — состояний, ситуаций, событий.
Реализация причинной модели — это цепочка трансформации в более простые языковые конструкции при условии сохранения функции неопределенности и достоверности. Тогда можно предложить следующую простейшую лингвистическую реализацию причинной модели, как ее первое формальное сужение. Назовем правые части каждой строки условием (предикатом), левые — следствием. С целью сохранения функции достоверности с каждым следствием свяжем некий вес или коэффициент достоверности. Для выражения слов, фраз естественного языка и сохранения функции неопределенности воспользуемся понятием лингвистической переменной. Прогнозирующая модель является детерминированной, а прогноз однозначным и единственным, если нет двух правил с одинаковыми условиями и различными следствиями. Детерминированная модель может быть получена для определенной минимальной глубины ретроспекции. Вследствие неполноты прогнозной модели она перестает быть детерминированной. Появляются правила с одинаковыми условиями, но различными следствиями и отличными от единицы весами.
Прогнозирование осуществляется с помощью некоторого решателя, функционирование которого заключается в последовательном просмотре прогнозирующих правил. Каждое правило проверяется на выполнение определенного условия. Если условие выполняется, то определяются следующее состояние объекта управления (прогнозирования) и требуемые на него следствия, полученному результату присваивается вес, результат и вес запоминаются. Затем выбирается следующее правило. После просмотра множества правил прогнозирование заканчивается. В результате формируются нечеткое множество возможных состояний объекта прогнозирования и множество требуемых к выполнению организационно-технических мероприятий. Возможен и параллельный просмотр правил. При любом способе придется иметь дело с наличием нечеткого предиката, присутствием недостоверности и развитием прогнозирования в реальном времени. Известные формальные языковые средства либо не допускают неопределенностей, либо допускают только одну из них, либо не работают в реальном времени. Наиболее подходящими формальными языковыми средствами для воплощения прогнозирующего текста является разработанный нами язык операторных схем нечетких алгоритмов.
Непосредственно ситуационное управление на основе прогнозирующего текста рассмотрено в шестой главе. Прогнозирование на основании причинной модели и его прямая лингвистическая реализация предполагают: определить содержание понятий состояния, ситуации и события применительно к выбранной глубине ретроспекции и сообразно с целями и задачами системы прогнозирования, составить прогнозирующий текст на естественном языке на основе выбранного содержания понятий, затем полученный текст исполняется.
Для однозначного задания состояния требуется найти необходимое и достаточное количество признаков, которое обеспечит наиболее полное (с позиций прогнозирования) его описание, и определить множество проявлений каждого признака. В естественном языке для любого признака или его проявления существует слово или словосочетание (обычно не единственное), являющееся его наименованием. Очень важно закрепить за каждым признаком и его проявлением только одно наименование. Состояния — кирпичики, из которых строится описание ситуации, а связующие звенья — моменты времени, в которые они наблюдаются. Интервалы времени между наблюдениями состояний могут быть постоянными и переменными. Число моментов времени и размер интервалов между ними определяют глубину ретроспекции, на базе которой и строится прогноз. Прогнозирующий параметр — состояние, которое выбрано в качестве прогноза, может не являться состоянием в отмеченном ранее смысле, содержать в описании меньшее или большее число признаков. Выбор прогнозирующего параметра обусловливается целями прогнозирования.
Для осуществления полного перебора предложений в тексте и отработки каждого из них необходима однозначная реализация функции неопределенности и достоверности. С установлением однозначности имени особых сложностей не возникает. Функция достоверности отражает категории модальности в диапазонах реальность-ирреальность, и ее реализация требует дополнительной конкретизации прогнозирующих текстов. Модальность — отношение высказывания к действительности и виды субъективной квалификации сообщаемого. В тексте отражается либо минимальная величина модальности, либо некая мера модальности, которая показывает, во сколько раз или на какую величину одна возможность превосходит другую. Представление модальности — наиболее сложный этап смысловой подготовки текста. Потребность в модальностях связана с выбором или конкретизацией понятий состояния, ситуации, события и прогноза и в большей степени — с выбором глубины ретроспекции. С увеличением глубины ретроспекции снижаются потребность в использовании модальностей и принципиальные сложности представления, осмысливания и применения прогнозирующих текстов.
Несмотря на множество очевидных трудностей автоматического прогнозирования, существует принципиальная причина, которая определяет ее реальность или нереальность. Речь идет о необходимости выделения из предложения (или текста в целом) смысловой языковой структуры, содержание которой определяется не лексическим материалом, а структурой предложения — «скрытым» контекстом. Если работу с текстом можно сделать автоматической, то прогнозирование должно рассматриваться как типичная интерактивная процедура принятия решений. При интерактивном прогнозировании момент обращения к текстам — функция времени и пространства, сложность текстов различна, порядок выбора текстов определяется экспертом и составляет важное звено прогнозирования. Инструментальные средства модернизации системы прогнозирования должны быть простыми в обращении и понимании их предназначения. На каждом шаге система прогнозирования представляет собой систему предыдущего шага с изменениями, осуществленными посредством унифицированных инструментальных средств.
Данная последовательность является унифицированной процедурой агрегации формулы ситуации на любом шаге прогнозирования. Аналогично, в зависимости от формы ситуации, может быть организована процедура агрегации прогнозирующего текста. В ходе диалогового взаимодействия с исполнителем на каждом шаге формируется новая система прогнозирования — система прогнозирования порождает себя своим инструментарием. Чем выше уровень обобщения представлений об исследуемом явлении, тем в меньшей степени требуется механизм ретроспекции и множественности состояний, тем больше сложность определения и конструирования эффективных событий, тем меньше возможностей автоматического исполнения прогнозирующего текста.
Независимо от языкового выражения модели и структуры, ее аппаратная реализация представляется в виде цифровых вычислительных машин с определенным порядком исполнения строго определенных инструкций по отработке ограниченного числа арифметических (логических) операций. Жизнеспособность методик прогнозирования определяется разработкой инструментария, включая полную формализацию прогнозирующего текста на лингвистическом, семантическом и прагматическом уровнях, созданием микроЭВМ для отработки функций отдельного предложения и конструированием соответствующей системы общения для обеспечения возможности проведения экспертных оценок. Разработан способ встраивания систем прогнозирования на основе причинной модели в СУ как программной системы реального времени.
Построению систем автоматизации с использование лингвистических средств посвящена седьмая глава. Говоря о применении в современных микропроцессорных распределенных системах управления специализированных языковых средств, можно отметить их большое разнообразие и специфику в зависимости от конкретного вида объекта, мощности и задач, решаемых системой управления. Наличие большого множества специализированных и проблемноориентированных языков говорит об удобстве их применения в каждом конкретном классе задач управления. С другой стороны, непосредственная реализация каждого из этих языков для конкретного класса задач и конкретного оборудования является очень трудоёмкой, особенно если учесть современные темпы развития СУ, средств вычислительной техники и самих объектов управления.
Налицо необходимость в исследовании и разработке таких программных и лингвистических средств, которые позволили бы с минимальными затратами трудовых и технических ресурсов создавать удобные для пользователя специализированные языки управления для нужного ему класса задач, иметь эффективные средства для адаптации к изменениям как в составе самой системы управления, так и объекте управления. Эти же средства должны обеспечить реализацию разработанных алгоритмов как множества параллельных, влияющих друг на друга процессов с возможностями построения управления объектом на основе прогноза ситуации и учета интеллектуальных свойств датчиков и исполнительных устройств как первичных структур управления. В рамках решения этой задачи:
— созданы инструментальные языковые средства построения лингвистического обеспечения АСУ технологическими процессами и объектами;
— произведен выбор структуры реализации базового ПО (БПО) АСУ и его основных компонент;
— решены вопросы адаптации БПО к конкретному составу контрольно-измерительной аппаратуры, организации взаимодействия параллельных процессов при прохождении задачи управления и реализации параллелизма на однопроцессорной вычислительной установке и в системах с распределенной вычислительной мощностью;
— произведена программная реализация средств БПО;
— предложена методика применения разработанных средств БПО.
Автоматизированная система учета и управления потреблением энергоносителей «Эргон» разработана и реализована на основе предложенных в работе подходов. «Эргон» ориентирован на работу с различными видами энергоносителей для предприятий по производству стройматериалов, а также малых и средних промышленных предприятий, имеющих производства, территориально расположенные в пределах 4-х км. Система имеет иерархическую сетевую структу.
21 ру, в состав которой входят: ПЭВМ с печатающим устройствомсетевой адаптертехнологические контроллеры со специальным лингвистическим и программным обеспечением нижнего уровнясетевая магистраль, выполненная в виде витой парыпервичные датчики потребления энергиилингвистическое и программное обеспечение верхнего уровня. Помимо учетных и контролирующих функций, «Эргон» осуществляет прогноз и выдачу рекомендаций обслуживающему персоналу по устранению возникших и предотвращению возможных нежелательных ситуаций.
Воплощение экспертной технологии прогнозирования в макетном образце представляет разработанная по заказу МУП «Гортеплосети» г. Белгорода система автоматизации процессов контроля и прогнозирования функционирования тепловых сетей. Здесь, основываясь на математическом аппарате, изложенном в работе, предложена методика обнаружения повреждений и предупреждения аварийных ситуаций, которая обеспечивает такие качества, как оперативность определения типа и места повреждения, точность его локализации, массовость и реальность применения для любых существующих сетей.
Еще один пример применения лингвистического подхода. В качестве объекта управления рассмотрен разрабатываемый нами программно аппаратный комплекс исследования трещиностойкости железобетонных конструкций, проходящий в настоящее время испытания в БелГТАСМ и ПСФ «Содружество». Основу лингвистического обеспечения комплекса составляет специализированный язык, определяющий состав и структуру элементов, входящих в комплекс. Реализован специализированный язык в виде набора классов, включающих ряд свойств и методов, определяемых кругом решаемых задач.
Материалы диссертации докладывались и обсуждались на III Всесоюзной научно-технической конференции «Программное, алгоритмическое обеспечение АСУТП», Ташкент, 21−23 октября 1985 г.- Всесоюзной научно-технической конференции «Современные проблемы технологии машиностроения», Москва, 2931 января 1986 г.- Всесоюзной конференции «Ускорение научно-технического прогресса в промышленности строительных материалов и строительной индустрии», Белгород, 1987 г.- отраслевом семинаре «Механизация и автоматизация технологических процессов на предприятиях стройиндустрии и строительных материалов», Челябинск, 1987 г.- Всесоюзной конференции «Фундаментальные исследования и новые технологии в строительном материаловедении», Белгород, 1987 г.- Всесоюзной конференции «Физико-химические проблемы материаловедения и новые технологии», Белгород, 21−24 мая 1991 г.- Республиканской научно-технической конференции «Проблемы автоматизации контроля и диагностирования сложных технических систем», Житомир, 17−19 сентября 1991 г.- Международной конференции «Ресурсосберегающие технологии строительных материалов, изделий и конструкций», Белгород, 1993 г.- Международной конференции «Ресурсои энергосберегающие технологии строительных материалов, изделий и конструкций», Белгород, 26−29 сентября 1995 г.- Международной конференции «Промышленность стройматериалов и стройиндустрия, энергои ресурсосбережение в условиях рыночных отношений», Белгород, 1997 г.
В работе приведены результаты исследований, выполненных в 1985 -1998 гг. в рамках НИР госбюджетной НИЛ № 42 БелГТАСМ («Разработка теоретических основ и методики создания интегрированных АСУ в производстве строительных материалов и конструкций», № Г/рег. 01.95.245, 93−6-14, «Принципы разработки и методы построения унифицированных средств управления для интеллектуальных зданий»), межвузовских НТП «Микропроцессоры и микро-ЭВМ» и «Архитектура и строительство», по заказам предприятий: п/я Г-4084 (1/85, «Исследование и разработка систем автоматизации программного обеспечения средств контроля на базе микро-ЭВМ»), ОКБТИ завода «Ритм» (13/86, «Разработка элементов технического, конструкторского, алгоритмического и программного обеспечения гибкого автоматизированного производства на базе мини-ЭВМ»), п/я А-3361 (16/87, «Исследование принципов построения АРМ контроля и диагностики узлов ПЭВМ и разработка их программно-лингвистического обеспечения»), КБ «Восход» (9/88, «Исследование и разработка базовых программно-лингвистических средств микропроцессорных систем демонтированного оборудования»), МУП «Гортеплосети» (32/96, «Автоматизация процессов контроля и прогнозирования функционирования оборудования тепловых пунктов»).
Основные результаты работы.
Предложена методология построения моделей в системах ситуационного управления технологическими процессами на основе применения языков как средств описания и оценки ситуации, структуры и прогнозирования поведения как внутри самой системы управления, так и при ее взаимодействии с внешней средой.
Предложена структура (модель) управления, обеспечивающая согласование объекта, управляющей системы, среды и формирование наиболее подходящих управляющих воздействий, что достигается наличием определенных функциональных моделей и средств.
Показано, что при моделировании и имитации с целью выработки управляющих воздействий и оценки качества управления для сложных технологических процессов необходимо использовать описания на языках, близких к естественным, которые могут оперировать с нечетко выраженными понятиями, целями, ситуациями, критериями, при этом основная нагрузка ложится не на языки моделирования и имитации функционирования, а на соответствующие стратегии, что позволяет отразить динамику не только ситуаций, но и структуры системы объектуправляющая система — среда.
В результате анализа представлений о первичных структурах управления обоснована:
— необходимость возложить на предметно-математические модели, как обобщенные средства представления информации о системе объект-управляющая система-среда, основные функции измерительной аппаратуры и преобразователей, для любого датчика сложного сигнала, в том числе и получаемого экспертным путем;
— важность формирования воздействий со стороны датчика на объект не с целью управления объектом или изменения его функционирования, а с целью получения стабильной локально организованной среды. Таким образом, структура датчика соответствует структуре контура управления и вкладывается в обычные границы управления, то есть — это композиция замкнутых контуров управления, основу которых определяет их вычислительная мощность, входящая в состав распределенной вычислительной мощности обобщенного датчика, представляющего с точки зрения моделирования первичную структуру управления сложным технологическим процессом;
— структурная сложность обобщенного датчика, которая определяется многообразием и взаимоотношениями используемых микроЭВМ, то есть аппаратурой реализации распределенной вычислительной мощности, исследование основных свойств которой позволяет сформулировать класс интеллектуальных датчиков, как устройств для реализации подобных структур.
Исходя из необходимости представления сложных сигналов, в том числе и в виде языкового описания, при моделировании в системе управления:
— найден общий подход к решению задачи дискретизации, хранения и восстановления сложных сигналов при отсутствии их аналитического описания, обеспечивающий требуемую точность значений функции, значения ее производных до заданного порядка при отсутствии избыточности сохраняемой информации;
— выявлены общие закономерности, присущие различным видам приближений при аппроксимации непрерывных зависимостей неизвестного аналитического описания, и возможности приближения по единой вычислительной схеме;
— предложен вид интерполяционного многочлена Эрмита, допускающий проведение расчетов при изменении числа контролируемых производных без повторения всего объема вычислений;
— реализованы конструктивные методы аппроксимации сигналов, основанные на использовании непрерывных кусочно-линейных, кусочно-постоянных и специальных экспоненциальных функций;
— создан алгоритм дискретизации функции, используя который можно извлечь из полученного набора точек информацию не только о значениях функции с заданной точностью, но и о значениях ее производных.
Только при симбиозе естественного языка и человеческого мышления обеспечивается полнота описания системы объект — устройство управлениясреда. Отсюда принципиально обосновывается необходимость:
— непосредственного участия человека в структуре управления в качестве эксперта. Если требуется обобщенная оценка о качестве функционирования сложных технологических процессов, то без участия человека-эксперта в управлении обойтись нельзя. Автоматизация экспертного анализа и вывода принципиально не может быть реализована в автоматическом исполнении;
— изменить акценты в суждениях о второстепенной роли экспертной составляющей управления. Именно она обуславливает не только большинство возможностей производственных систем, но и развитие их автоматизации, выражая единство объекта, управляющей системы и среды и выступая в роли функционального источника автоматизации. Успешное существование объекта во внешней среде возможно лишь при наличии экспертной технологии в структуре управления, поскольку постоянно существует неопределенность в выборе цели — множественность целеполагания;
— правильного выбора способа представления знаний, который должен обеспечить не только эффективность системы прогнозирования, но и саму возможность ее создания, восприятие и передачу сигналов, который обусловливает проблематику интерактивного интерфейса и его языково-технической поддержки.
Исходя из роли и места прогнозирования в структуре управления, особенностей лингвистической реализации прогноза при управлении сложными технологическими процессами, предложена тактика прогнозирования, основанная на прогнозирующем тексте, который:
— допускает совместное использование исчисления предикатов и теории нечетких множеств, которые образуют звенья единой подчинительной цепи со значительной глубиной синтаксической перспективы;
— образует причинную модель, обладающую свойством принадлежности к управляемому процессу, назначения по изменению порядка восприятия, объектной либо структурной ориентации, смысловой достоверности и полноты определенности, неопределенности глубины ретроспекции, обозримостью, языковой определенност ью;
— является простейшим лишь в структурном аспекте. Нельзя отрицать существование множества явлений, для которых его конструкция определит исчерпывающий текст прогнозирования при смысловом расширении за счет введения в каждое предложение большей глубины синтаксической перспективы и различного типа подчинения/соподчинения.
В результате анализа задач ситуационного управления технологическими процессами показано, что прогнозирование на основании причинной модели и ее прямая лингвистическая реализация — это созданное человеком материальное образование, которое не может осуществляться без него, и призвано «автоматизировать» какую-то часть его деятельности и «усилий» по достижению прогноза.
Дано математическое обоснование процессу формирования прогнозирующего теста на уровне семантической трансляциилингвистической аппроксимации, прагматической трансляции и семантической аппроксимации, позволяющее непосредственно подойти к прогнозированию.
Практически обоснована возможность построения алгоритма прогнозирования на основе разработки отдельных инструментальных методов проектирования нечетких алгоритмов. Они включают в себя систему редакторов, позволяющих непосредственно в графическом виде вводить и редактировать скелетную схему языка, описывать лингвистические переменные, предикатные и функтор-ные выражения.
Предложена технология реализации управления на основе прогнозирующего текста (причинной модели), доказана и практически обоснована техническая реальность создания реализующих такую модель управления устройств и возможность встраивания прогнозирования в структуру управления как программной системы реального времени.
Разработана структура и реализованы инструментальные средства создания специализированных языков пользователя и соответствующих им программных систем.
Показана и подтверждена жизненность лингвистического подхода на примерах построения автоматизированных систем управления и контроля сложными технологическими процессами. Проведены эксперименты по макетированию распределенной вычислительной мощности посредством взаимодействующих микроЭВМ разноцелевого назначения, что позволило реализовать инструментальные средства управления автоматизированным испытанием, систему управления и контроля состояния теплосетей, систему учета и управления потреблением энергоресурсов, систему автоматизации испытаний трещиностойкости анизотропных материалов.
Список литературы
- Винер Н. Кибернетика. М.: Сов. радио, 1968.- 214 с.
- Морис У.Т. Наука об управлении. Байесовский подход. М.: Мир, 1971. — 304 с.
- Абрамова Н.Т. Целостность и управление. М.: Наука, 1974. — 254 с.
- Садовский В.Н. Основания общей теории систем. М.: Наука, 1974.280 с.
- Актуальные задачи теории динамических систем управления: Сб. научных статей/Под ред. Р. Габасова, И. В. Гайшуна, Ф. М. Кириловой. Минск: Наука и техника, 1989. — 334 с.
- Справочник разработчика АСУ / Под ред. Н. П. Федоренко, В.В. Кориб-ского. Изд.2. М.: Экономика, 1978. — 582 с.
- Антонюк Б.Д. Разработка экспертных систем искусственного интеллекта в США. Препринт. М.: ВНИИСИ, 1985. — 77 с.
- Поспелов Д.А. Ситуационное управление: теория и практика. М.: Наука, 1986.-288 с.
- Алиев P.A., Абдикеев Н. М., Шахназаров М. М. Производственные системы с искусственным интеллектом. М.: Радио и связь, 1990. — 264 с.
- Константинов И.С., Эляшкевич H.JI. Формирование планов формовочным цехам с использованием ЭВМ .//Строительная индустрия для энергетического строительства. 1983. — Вып. 2. — С.12−16.
- Константинов И.С. Дисплейная обработка информации в АСУ ПО «Днепроэнергостройпром»//Средства и системы управления в энергетике. -1984. Вып.1. — С.13−16.
- Константинов И.С. Основные принципы построения автоматизированной системы обработки данных в управлении объединения «Днепроэнергост-ройиндустрия»//Строительная индустрия для энергетического строительства. -1983. Вып. 2. — С.8−12.
- Агейкин Д.И., Костина E.H., Кузнецова H.H. Датчики контроля и регулирования. 2-е изд., перераб. и доп. М.: Машиностроение, 1965. — 928 с.
- Туричин А.М. Электрические измерения неэлектрических величин. -Учеб. пособие для энерг. и электротехн. высш. учеб. завед. и факульт.- M.-JL: Госэнергоиздат, 1951. 628 с.
- Долгов В.А., Келин A.B. Электронные датчики для автоматических систем контроля. М., Энергия, 1968. — 284 с.
- Константинов И.С. Исследование и разработка алгоритмических и программно-технических средств локальной сети рабочих мест автоматизированного проектирования.//Отчет Белгородского технологического института строительных материалов, 1988. 143 с.
- Константинов И.С. Регулярные структуры аппаратных и программных средств контрольно-измерительных и управляющих микропроцессорных ком-плексов//Сб. «Системотехника в промышленности строительных материалов». -Белгород: Изд-во БТИСМ, 1992 г. С. 145−148.
- Константинов И.С. Исследование и дальнейшее совершенствование оперативного управления в учебном процессе в условиях функционирования автоматизированной системы.//Отчет Белгородского технологического института строительных материалов, 1984. 93 с.
- Константинов И.С. Некоторые вопросы формализации в системах обработки данных//Вычислительная математика и кибернетика.- 1984. Вып. 1. -С 14−23.
- Проблемы разработки и внедрения интегрированных систем проектирования, подготовки и управления производством, применения микропроцессорной техники и создание гибких автоматизированных производств//Тез. докл. научно-тех. конф. Минск, 1984. — 124 с.
- Горбатов В.А. Интеллектуальные информационные технологии и стратегии (состояние и перспективы)//Информационные технологии, — 1995.- Нулевой выпуск. С. 35−38.
- Захаров В.H. Ульянов C.B. Нечеткие модели интеллектуальных промышленных регуляторов и систем управления. II. Эволюция и принципы по-строения//Изв. РАН. Техническая кибернетика. 1993.- № 4.- С.10−18.
- Бир С. Кибернетика и управление производством. М.: Физматгиз, 1963.-391 с.
- Фельдбаум А. А. Основы теории оптимальных автоматических систем. М.: Наука, 1966.-624с.
- Ивахненко А.Г. Самообучающиеся системы распознавания и автоматического управления. Киев: Техника, 1969.- 392 с.
- Цыпкин Я. 3. Адаптация и обучение в автоматических системах. М.: Наука, 1968, — 399 с.
- Имитационное управление сталеплавильными процессами с использованием теории распознавания образо/ В. И. Васильев, П. И. Коваль, В.В. Конова-ленко, И. Ю. Лазяренко //Автоматика -1982. -№ 1.- С. 60−69- № 2, — С.58−65.
- Клыков Ю.И. Семиотические основы ситуационного управления. М.: МИФИ, 1974.- 171 с.
- Кулик В.Т. Современная теория организации систем (системология). -Киев: Знание, 1971.- 176 с.
- Развитие концепции структурных уровней в биологии: Сб. ст. М.: Наука, 1972.- 392 с.
- Антомонов Ю.Г., Харламов В. И. Кибернетика и жизнь. М.: Сов. радио, 1967.-117 с.
- Раков В.И. Об одном подходе к построению аналоговых преобразователей повышенной точности // Сб. тр. МЭИ. Сер. Элементы радиоэлектронных устройств и их исследование с применением вычислительной техники.- М.: МЭИ, 1974.- Вып. 190. -С.80−88.
- Алгоритмическое, программное и техническое обеспечение гибких производственных систем. Межвуз. сб/ Под ред. A.B. Башарина, Б. Я. Советова. -Л.: изд-во ЛГУ, 1988.-., вып 7. 216с.
- Автоматизированное управление процессами химической технологии. -М.: Наука, 1981.-213с.
- Аксельрод Ю.В. Газожидкостные хемосорбционные процессы. Кинетика и моделирование. М.: Химия, 1989. — 240 с.
- Лорьер Ж.-Л. Системы искусственного интеллекта: Пер. с фр.- М.: Мир, 1991.- 558 с.
- Адаптивные системы управления оборудованием с использованием микропроцессорной техники: Сб. научных трудов/Под ред. В. П. Мурашко Москва: — М.: МИФИ, 1989. — 135 с.
- Александров А.Г. Синтез регуляторов многомерных систем. М.: Машиностроение, 1986. — 272 с.
- Александров А.Г. Оптимальные и адаптивные системы. М.: Высшая, школа, 1989. — 264 с.
- Болыпая Советская Энциклопедия. М.: СЭ, 1973. — т.12. — 623 с.
- Вопросы кибернетики. Ситуационное управление/Под ред. Д. А. Поспелова, Е. И Ефимова М.: Советское радио, 1975. — Вып. 14. — Ч. II. — 165 с.
- Вопросы кибернетики. Ситуационное управление и семиотические моделирование/Под ред. Д. А. Поспелова. М.: Финансы и статистика, 1983,-190с.
- Егоров К. В, Основы теории автоматического регулирования. М.: Энергия, 1968.- 647 с.
- Основы автоматического управления/ Под ред. Пугачева B.C. М.: Наука, 1968.-419 с.
- Коршунов Ю.М. Математические основы кибернетики. М.: Энергия, 1972.- 524 с.
- Клыков Ю.И. Ситуационное управление большими системами. М.: Энергия, 1974.- 136 с.
- Клыков Ю.И. Семиотические основы ситуационного управления. М.: МИФИ, 1974.- 171 с.
- Вопросы кибернетики. Ситуационное управление. Теория и практика/ Под ред. Д. А. Поспелова, Ю. И. Клыкова М.: Сов. радио, 1974. — Вып.13 -.4.1 -213 с.
- Клыков Ю.И. Диалоговая автоматизированная система принятия решений (ДАСПР)// Проблемы принятия решений. АН СССР. Институт психологии. 1976, — С.300−308.
- Зарубин B.C. Математическое моделирование процессов в континуальных системах //Информационные технологии. Нулевой выпуск. М.: Машиностроение" 1995.- C. ll-14.
- Луи де Бройль. Введение в волновую механику. Харьков-Киев., 1934, — 234 с
- Позин Н.В. Моделирование нейронных структур. М.: Наука, 1970.259 с.
- Исследование операций (модели, системы, решения)/ Отв. ред. Ю. П. Иванишев М.: ВЦ АН СССР, 1991. — 139 с.
- Батороев К.Б. Аналогии и модели в познании. Новосибирск: Наука, 1981, — 320 с.
- Системы и моделирование. М.: Мир, 1967.- 419 с.
- Карпенко А.Н., Халанский В. М. Сельскохозяйственные машины. Изд.6. М.: Агропромиздат, 1983.- 527 с.
- Автоматизация моделирования промышленных роботов. М.: Машиностроение, 1995.-304с.
- Автоматизированные системы управления технологическими процессами: Межвуз. сб. науч. тр. по автоматике, вычислительной технике и электронике. Ереван: Ереванский политехнический институт им. К. Маркса, 1984.- 351 с.
- Скурихин В.И., Забродский В. А., Копейченко Ю. В. Проектирование систем адаптивного управления производством. Харьков: Вигца.шк., 1984.- 206с.
- Пушкин В.Н. Оперативное мышление в больших системах.- М.-Л.: Энергия, 1965. 197 с.
- Джемс Х.М., Николос Н. Б., Филлипс P.C. Теория следящих систем. -М.: ИЛ, 1951.- 183 с.
- Понтрягин Л.С., Болтянский В. Г., Гамкрелидзе Р. В., Мищенко Е. Ф. Математическая теория оптимальных процессов. М.: Физматгиз, 1961, — 211с.
- Atha№s M., Falb P.L.Optimal co№trol. №-Y.: McGraw-Hill, 1966. — 4111. P
- Зубов И.В., Воробьев H.H. Качественный анализ процессов управления. Л, ЛГУ, 1987, — 186 с.
- Константинов И.С. Исследование и разработка системы автоматизации программного обеспечения средств контроля на базе микроЭВМ. //Отчет Белгородского технологического института строительных материалов, 1986, — 181 с.
- Константинов И.С., Белоусов А. В., Постольский Г. В. Перестраиваемый модуль хранения программ управления и данных для робототехнических систем. //Сб. Управляющие системы и роботы в промышленности строительных материалов, — М.: МИСИ.- 1987.- С.200−210.
- Константинов И.С., Постольский Г. В., Рубанов В. Г. Система базового лингвистического и программного обеспечения АСК. // Сб. Управляющие системы и роботы в промышленности строительных материалов, — М.: МИСИ-1987, — С.68−72.
- Константинов И.С., Ломакин В. В. Программные средства реализации специализированных языков контроля. // Фундаментальные исследования и новые технологии в строительном материаловедении: Тезисы докладов Всесоюзной конференции Белгород, 1987. — С. 47.
- Программирование на Ассемблере. // Методические указания для студентов специальности 06.38/ И. С. Константинов, В. А. Печенкин, A.C. Кижук, В.М. Поляков- Белгород: Изд. БТИСМ, 1987.- 50 с.
- Константинов И.С. Исследование принципов построения АРМ контроля и диагностики узлов ПЭВМ и разработка их программно-лингвистического обеспечения.// Отчет Белгородского технологического института строительных материалов, 1988.- 280 с.
- Константинов И.С. Имитационное моделирование функционирования элементов локальной сети. // Сб. Системотехника в промышленности строительных материалов. Белгород: Изд. БТИСМ, 1992 г. — С.5−12.
- Potape№ko А.№., Ko№sta№ti№ov LS., El Hammouda№i A., Semer№i№ A.№. The Fealures of the Modelli№g of High Velocity Pulsati№g Jets. //1№ a book: 15th I№ter№atio№al Thermal Spray Co№fere№ce a№d Exhibitio№. №ice, Fra№ce. 1998.- P. l 15−124.
- Управление, информация, интеллект / Под ред. А. И. Берга и др. М.: Мысль, 1976.- 383 с.
- Диксон Д. Проектирование систем: изобретательство, анализ и принятие решений. М.: Мир, 1969.- 440 с.
- Логика и методология науки. М.: Наука, 1967.- 379 с.
- Беленький Я.Е., Кац Б.М. Многоточечные бесконтактные сигнализаторы температуры. М.: Энергия, 1974.- 120 с.
- Форрестер Дж. Основы кибернетики предприятия. М.: Прогресс, 1971.-417 с.
- Гельман М.М. Датчик /Гл. ред. A.M. Прохоров.// БСЭ, изд. З, М.:СЭ, 1972-Т.7, — С.559−560.
- Айзинов М.М. Избранные вопросы теории сигналов и теории цепей. -М.: Связь, 1971, — 241 с.
- Р.Паллю де ла Барьер. Курс теории автоматического управления. М.: Машиностроение, 1973.- 397 с.
- Дедков В.К., Северцев H.A. Основные вопросы эксплуатации сложных систем. М.: Высш.шк., 1976.- 406 с.
- Поспелов Г. С., Поспелов Д. А. Искусственный интеллект. Прикладные системы. М.: Знание, 1985. — 48 с.
- Рэй У. Методы управления технологическими процессами: Пер с англ.- М.: Мир, 1983.-368с.
- Оми Т. Современное состояние гибких производственных систем. Jour№al of the Japa№ Society of Mecha№ical E№gi№eers.V.86. 1983.- № 779. -P.1131−1136.
- Моделирование и исследование сложных систем. Материалы научно-техн.конференции. Кашира: Межд. Акад. информатизации, 1996, — 140 с.
- Варакин JI.E. Теория сложных сигналов. М.: Сов. радио, 1970.- 376с.
- Кук Ч., Бернфельд М. Радиолокационные сигналы. М.: Сов. радио, 1971, — 568 с.
- Вакман Д.Е., Седлецкий P.M. Вопросы синтеза радиолокационных сигналов. М.: Сов. радио, 1973.- 312 с.
- Раков В.И., Константинов И. С. О семантике процесса управления/ БелГТАСМ.- Белгород, 1996.- 54с, — Деп. в ВИНИТИ 22.08.1996, № 2711-В96.
- Трахтман A.M. Введение в обобщенную спектральную теорию сигналов. М.: Сов. радио, 1972.- 256 с.
- Морозов К.Е. Математические модели в кибернетике. М.: Знание, 1968.-48с.
- Корн Г., Корн Т. Электронные аналоговые и аналого-цифровые вычислительные машины. М.: Мир, 1967,-. Т.1.- 832 с.
- Беки Дж., Карплюс У. Теория и применение гибридных вычислительных машин. М.: Мир, 1970.- 416 с.
- Каляев A.B. Введение в теорию цифровых интеграторов. К.: Науко-ва думка, 1964.- 277 с.
- Каган Б.М., Каневский М. М. Цифровые вычислительные машины и системы. М.: Энергия, 1970.- 680 с.
- Персональный аналоговый компьютер. М.: Энергоатомиздат, 1992,256с.
- Датчики производственных процессов// Американская техника и промышленность. Сб. рекл. материалов. Вып. XI. Приборы и системы управления. В/О Внешторгреклама СССР, фирма Чилтон Ко. США, 1979, — С.29−49.
- Изерман Р. Цифровые системы управления. М.: Мир, 1984. — 541 с.
- Раков В.И., Константинов И. С. О некоторых свойствах цепей автоматического управления/ БелГТАСМ.- Белгород, 1996.- 22с.- Деп. в ВИНИТИ 22.08.1996, № 2709-В96.
- Голубев-Новожилов Ю. С. Многомашинные комплексы вычислительных средств. М.: Сов. радио, 1967.- 424 с.
- Поспелов Д.А. Введение в теорию вычислительных систем. М.: Сов. радио, 1973.- 285 с.
- Головкин Б.А. Параллельные вычислительные системы. М.: Наука, 1980.- 325 с.
- Прангишвили И.В. Микропроцессоры и локальные сети микроЭВМ в распределенных системах управления. М.: Энергоатомиздат, 1985.- 290 с.
- Барский А.Б. Параллельные процессы в вычислительных системах. -М.: Радио и связь, 1990.- 255 с.
- Артамонов Г. Т., Тюрин В. Д. Топология сетей ЭВМ и многопроцессорных систем. М.: Радио и связь, 1991.- 248 с.
- Гоноровский И.С. Радиотехнические цепи и сигналы. М.: Радио и связь, 1986.- 512 с.
- Ананян М.А., Раков В., И. К вопросу о производительности средств вычислительной техники. Деп. рук. № ВМ ДР 200 475. М.: ВИМИ, Сб.реф. деп. Рук. 1973. -№ 12.-20 с.
- Кущенко B.C. Сборник конкурсных задач по математике. JL: Судостроение, 1964.- С. 583.
- Андерсон Т. Введение в многомерный статистический анализ. М.: ФМ, 1963.- 500 с.
- Дорофеюк A.A., Касавин А. Д., Торговицкий И. Ш. Применение методов автоматической классификации для построения статической модели объек-та//Автоматика и телемеханика, 1970. № 2. — С.128−138.
- Dubois D., Prade Н. Fuzzy Sets a№d Systems: Theory a№d Applicatio№s. №.- J.: Acad. Press., 1980, — 393 p.
- Алиев P.A., Богданис Ф. С. Планирование нефтеперерабатывающего производства в нечетких условиях // Изв. вузов СССР. Нефть и газ, № 12,1985.-С. 77−80.
- Стахов А.П. Введение в алгоритмическую теорию измерений. М.: Сов. радио, 1977.- 288 с.
- Белоус А.И., Хвощ С. Т. Инжекционные микропроцессоры в управлении промышленным оборудованием. JL: Машиностроение, 1985. 182 с.
- Баранов С.И., Скляров В. А. Цифровые устройства на программируемых БИС с матричной структурой. М.: Радио и связь, 1986. — 272 с.
- Белоус А.И., Блинков O.E., Силин A.B. Биполярные микросхемы для интерфейсов автоматического управления. JL: Машиностроение, 1990.- 272 с.
- Базовые матричные кристаллы и матричные БИС. М.: Энергоатом-издат, 1992, — 224 с.
- Школенко A.C. Промышленные роботы. Кемерово: НИПТИ ПО Кузбасс-электромотор. 1979.- 300 с.
- Воробьев В.А., Френкель Г. Ю., Юков А. Я. Анализ состояния и тенденции развития робототехники в строительстве // Изв. вузов. Строит, и арх., 1984.- № 9. — С.81−87.
- Управляющие системы промышленных роботов. М.: Машиностроение, 1984.-287С.
- Фиделев A.C. Строительные машины зарубежных стран. Киев: Высш. шк., 1984.- 128 с.
- Френкель Г. Ю. Роботизация процессов в строительстве. М.: Строй-издат, 1987, — 173 с.
- Вернер Е.В. Использование промышленных роботов в производстве строительных материалов // Строит, материалы. 1986.- № 4. СС. 10−11.
- Вильман Ю.А. Основы роботизации в строительстве. М.: Высш.шк., 1989,-271 с.
- Бейтс Р. Определение pH. Теория и практика. Л.: Химия, 1972.- 397 с.
- Артамонов К.В., Дворник Л. С. и др. Автоматический контроль тех-нологи-ческих процессов в промышленности строительных материалов. Л., Стройиздат, Ленингр. отд-ие, 1978. 175 с.
- Биренберг Н.Э., Карпов Е. Ф. Автоматическая газовая защита и контроль рудничной атмосферы.- М.: Химия, 1984.- 215 с.
- Аксельрод Ю.В. Газожидкостные хемосорбционные процессы. Кинетика и моделирование. М.: Химия, 1989.- 240 с.
- Бех А.Д., Чернецкий В. В. Периферийные измерительные устройства. Киев: Наукова думка, 1991. 220 с.
- Джон Г. Перри. Справочник инженера-химика.- JI.:JIO Химия, 1969. -Т.1.- 640 с.
- Касаткин А.Г. Основные процессы и аппараты химической технологии. Изд.8, М.: Химия, 1971.- 784 с.
- Алабовский А.Н., Недюший И. А. Техническая термодинамика и теплопередача. 3 изд. Киев: Выща шк., 1990, — 255 с.
- Андерсон Д. Вычислительная гидромеханика и теплообмен/ Под ред. Г. Л. Подвидза- Пер с англ. C.B. Сенкна, Е. Ю. Шальмана М., Мир, 1990.-Т.1- 384 с.
- Ленц Дж. Э. Обзор магнитных датчиков // ТИИЭР, 1990. Т. 18.- № 6. -С.87−102.
- Подводная телеуправляемая установка «Теленот'У/Проспект франц. ин-та нефти, — 1965.- 10 с.
- Промышленная электроника. Справочник. Киев: Наукова думка, 1966,-359 с.
- Аппараты для передвижения по поверхности Луны. ВИНИТИ. Экс-пресс-инф. «Астронавтика и ракетодинамика», 1967. № 19. — С.15−28.
- Патент США № 1 498 145, МКИ G4A, G06 °F 9/18 от 26.11.74. Мульти-микропроцессор на одном полупроводниковом кристалле, 1974.- 40 с.
- Патент Франции № 2 428 283, МКИ G06 °F 9/18 от 05.06.78. Устройство, расположенное внутри микропроцессоров и предназначенное для реализации мультипроцессорных систем, 1978.- 58 с.
- Wilkie J.D.E.Process Co№trol Usi№g Micros./Electro№. a№d I№strum., l 1,1980.-№ 9. -P.51−55.
- Alessa№dro№i Valerio/ Macehi№e, 35, 1980. № 10, — PP. l 11−114,119 121.
- Еремеев Ю.М., Орехов C.A., Подборонов Б. П. Универсальный цифровой регулятор на основе микроЭВМ//Электрон.промышл., 1978.- № 5 С.48−50.
- Заявка № 516 288, МКИ G05B 23/02 от 19.09.69. Япония. Системауправления процессом.
- Заявка № 533 038, МКИ G05B 19/18 от 01.12.71. Япония. Устройство цифрового программного управления металлорежущим станком. 1971.
- Заявка № 544 222, МКИ G06 °F 03/04,15/46 от 20.12.71. Япония. Вычислительная система для управления производственным процессом.
- Заявка № 544 817, МКИ G06 °F от 19.09.69. Япония. Многопроцессорная система.
- Заявка № 2 344 063, МКИ G05B 11/32 от 11.11.77. Франция. Двухка-нальная система цифрового управления.
- Деткин Л.П. Микропроцессорные системы управления и регулирования вентильными электроприводами. М.: Информэлектро, 1980.- 112 с.
- Гераймович И.Т., Файнштейн В. Г. Микропроцессорное устройство регулирования скорости электропривода. Тезисы докл. на НТС «Союзпреобразо-ватель». М.: ВНИИЭЛЕКТРОПРИВОД, 1981, — С.19−22.
- Хвощ С.Т., Варлинский H.H., Попов Е. А. Микропроцессоры и микроЭВМ в системах автоматического управления. Справочник/ Под ред. С. Т. Хвоща. Л.: Машиностроение, ЛОД987.- 640 с.
- Автоматизация и управление технологическими процессами: Сб. статей./ Под ред. Б.А. Сахарова- М.: Металлургия, 1966.- 215с.
- Броунштейн Б. И. Щеголев В.В. Гидродинамика, массо и теплообмен в колонных аппаратах.-Л.: Химия, 1988.- 336 с.
- Интегральные роботы. М.: Мир, 1973.- Вып. 1. — 421с.
- Интегральные роботы. М.: Мир, 1975.- Вып. 2. — 528с.
- Квейд Э. Анализ сложных систем. М.: Сов. радио, 1969.-519с.
- Честнат Г. Техника больших систем (средства системотехники). М.: Энергия, 1969.-656с.
- Шарадкин A.M. Основы теории дискретного моделирования сигналов в системах автоматизированного управления. Автореф. д.т.н., Киев: КИСИ, 1991, — 20 с.
- Хемминг Р.В. Численные методы. М.: Наука, 1972. — 400с.
- Машинное проектирование (обзор)// Электроника, 1967. т.40. — № 3. — С.5−50.
- Калахан Д. Машинный расчет интегральных схем. М.: Мир, 1971.490 с.
- Вулих Б.З. Введение в функциональный анализ. М.: Наука, 1967.349 с.
- Ибрагимов И.И. Методы интерполяции функций и некоторые их применения. М.: Наука, 1971.-384 с.
- Дьяченко В.Ф. Основные понятия вычислительной математики. М.: Наука, 1972.- 128 с.
- Ицкович Э.Л. Определение необходимой частоты при дискретном контроле.//Авт. и телемех. 1961.- № 2. 128 с.
- Фридрих 3. К теории дискретных отсчетов // Тр. МЭИ, 1963.- Вып.52.-С.3−40.
- Смолов В.Б. Аналого-цифровые и цифро-аналоговые нелинейные вычислительные устройства.- Л.: Энергия, 1974, — 264с.
- Смолов В.Б. Аналоговые вычислительные машины. М.: Высш. шк., 1972.-408 с.
- Соловьев В.Ф. Рациональное кодирование при передаче сообщений. -М.: Энергия, 1970, — 432с.
- Гинзбург С.А., Любарский Ю. А. Функциональные преобразователи. -М.: Энергия, 1973.- 512 с.
- Ананян М.А., Голяс Н. М. Алгоритмы построения генераторов функций с помощью ЭВМ. М.: МЭИ, 1973.- 40 с.
- Кульбак С. Теория информации и статистика. М.: Наука, 1967, — 176с.
- Берлекэмп Э. Алгебраическая теория кодирования. М.: Мир, 1971.315 с.
- Бендат Дж., Пирсал А. Измерение и анализ случайных процессов.1. М.: Мир, 1971.- 278 с.
- Статистическая обработка результатов экспериментов на микро-ЭВМ и программируемых калькуляторах/А.А.Костылев, П. В. Миляев, Ю. Д. Дорский и др.- Л.: Энергоатомиздат, Ленингр. отд-е, 1991.- 304 с.
- Ланнэ A.A. Оптимальный синтез линейных электрических цепей. -М.: Связь, 1969,-214 с.
- Уолш Дж. Л. Интерполяция и аппроксимация рациональными функциями в комплексной области. М.: ИЛ, 1961.- 335 с.
- Трибель Ханс Теория интерполяции, функциональное пространство, дифференциальные операторы./ Под ред. О.В. Бесова- Пер с англ. В.И. буренко-ва, М. Л. Гольдмана.- М.: Мир, 1980.- 664 с.
- Розенфельд А. Распознавание и обработка изображений. М.: Мир, 1972, — 230 с.
- Шилов Т.Е. Математический анализ. Конечномерные пространства. -М.: Наука, 1969.- 207 с.
- Березин И.С., Жидков Н. П. Методы вычислений. Т.1, М.: Наука, 1966.-502 с.
- Гельфанд И.М. Лекции по линейной алгебре. М.: Наука, 1966, — 512с.
- Канторович Л.В., Акилов Т. П. Функциональный анализ в нормированных пространствах. М.: ФМ, 1959.- 400 с.
- Ремез Е.Я. Общие вычислительные методы чебышевского приближения. К.: АН УССР, 1957, — 140 с.
- Ремез Е.Я. О методе последовательных чебышевских интерполяций и о различных вариантах его реализации/ УМН, 12, i960, — № 2.- С. 12−24.
- Алгоритмы /Под ред. М. И. Агеева. 51−100, М.: ВЦ АН СССР, 1966.-Вып.З.- 114 с.
- Фихтенгольц Г. М. Курс интегрального и дифференциального исчисления.- М.: Наука, 1966.- Т.1. 800 с.
- Дженкинс Г., Ватте Д. Спектральный анализ и его приложения. М: Мир, 1971−1972. Вып. 1,2, — 132 с. 211 .Бенеш В. Э. Математические основы теории телефонных сообщений. -М.: Связь, 1968.- 400с.
- Левин Б.Р. Теоретические основы статистической радиотехники. Кн.1 М.: Сов. радио, 1967. — 502 с.
- Харкевич A.A. Спектры и анализ. М.: ФМ, 1962.- 110 с.
- Демидович Б.П., Марон И. А., Шувалова Э. З. Численные методы анализа. М.: Наука, 1967, — 664 с.
- Хлистунов В.Н. Основы цифровой электроизмерительной техники. -М.: Энергия, 1966.- 345 с.
- Шварц Лоран. Анализ, т.1, М.: Мир, 1972, — 742 с.
- Курош А.Г. Курс высшей алгебры. М.: Наука, 1968.- 431 с.
- Картан А. Дифференциальное исчисление. М.: Мир, 1971, — 385 с.
- Гвишиани Д.М., Лисичкин В. А. Прогностика. М.: Знание, 1968.279 с.
- Янч Э. Прогнозирование научно-технического прогресса. М.: Прогресс, 1974.- 294 с.
- Brow№ R. G. Smoothi№g Forecasti№g a№d Predictio№ of Discrete Timeseries. №.?.: Pre№tice Hall, 1963. 300 p.
- Эшби У.P. Введение в кибернетику. М.: ИЛ, 1959.- 269 с.
- Мун Ф. Хаотические колебания. М.: Мир, 1990.- 286 с.
- Гноенский Л. С., Каменский Г. А., Эльсгольц Л. Э. Математические основные теории управляемых систем. М.: Наука, 1969.- 176 с.
- Эвристические процессы в мыслительной деятельности. М.: Наука, 1966.- 260 с.
- Ямпольский С. М., Хилюк Ф. М., Лисичкин В. А. Проблемы научно-технического прогнозирования. М.: Экономика, 1969.-271 с.
- Чуев Ю. В. Исследование операции в военном деле. М.: Воениздат, 1970, — 224 с.
- Обухов A.M. О статистически ортогональных разложениях эмпирических функций // Изв. АН СССР. Сер. геофиз. I960.- № 3. -С.38−52.
- Рябов Г. Г. Применение методов распознавания образов к техническому прогнозированию // Тр. I Всес. конф. по теор. и практике построения самонастраивающихся систем, Москва, 1963. Самообучающиеся автоматические системы, М.: Наука, 1966.- 168 с.
- Юдин М.И. Разложение эмпирических функций по естественным составляющим // Тр. гл. геофиз. обсерватории им. Воейкова. М., 1965.- Вып. 168.-С.10−132.
- Браиловский В.Л., Лунц А. Л., Наткович Ю. С. Об одной многоэтапной процедуре прогнозирования качества технологических, процессов // Материалы II Всесоюз. конф. по операт. управления производством. Ленинград, 1968.- Л.: Наука, 1969, — Ч.2.- 231 с.
- Горянков Э.В., Дорофеюк А. Л., Житких И. М. Использование метода автоматической классификации для индивидуального прогнозирования долговечности мощных клистронов // Авт. и телемех. 1969.- № 1. -С.67−98.
- Васильев Б.В. Прогнозирование надежности и эффективности радиоэлектронного устройства. М.: Сов. радио, 1971.- 126 с.
- Кубрицкий В.Д. Прогнозирование надежности радиоэлектронных устройств. Киев: Техшка, 1973.- 361 с.
- Турбович И.Т. О нахождении скрытых закономерностей на основе опытных данных // Нелинейные и линейные методы в распознавании образов. -М.: Наука, 1975. С. 5−12.
- Юрков Е.Ф. Нахождение одномерных нелинейных преобразований на основе одномерных статистических характеристик при прогнозировании // Нелинейные и линейные методы в распознавании образов. М.: Наука, 1975.- С. 1319.
- Гитис В. Г. Алгоритмы прогнозирования и синтеза признаков с использованием одномерных кусочно-линейных функций // Нелинейные и линейные методы в распознавании образов. М.: Наука, 1975. — С.19−33.
- Айвазян С.А., Бежаева З. И., Староверов О. В. Классификация многомерных наблюдений. М.: Статистика, 1974. — 504 с.
- Гмошинский В.Г. Инженерное прогнозирование технологии строительства. М.: Стройиздат, 1988. — 308 с.
- Глушков В.М. Основы безбумажной информатики М.: Наука, 1987. — 552 с.
- Каган М.С., Тер-Микоэлян Т.Д. Решение инженерных задач на цифровых вычислительных машинах. -2-е изд., перераб.- М.: Энергия, 1964. 592 с.
- Казакевич Т.А. Целесообразность и цель в общественном развитии. Л.: Наука, 1969.-315 с.
- Борзенко A.B. Проблема цели в общественном развитии. М.: Знание, 1963.- 484 с.
- Трубников H.H. О категориях «цель», «средство», «результат». М.: Знание, 1967. — 508 с.
- Вилли К. и Детье В. Биология. Биологические процессы и законы. -М.: Мир, 1975.-319 с.
- Дольник В. Непослушное дитя биосферы. Наука о природе поведения человека. М.: Педагогика-пресс, 1994.- 516 с.
- Попов Э.В. Особенности разработки и использования экспертных систем // Справочник: Искусственный интеллект. Кн. 1 Системы общения и экспертные системы. М.: 1990.- 360 с.
- Элти Дж., Кумбс М. Экспертные системы: концепции и примеры. -М.: Финансы м статистика, 1987. 190 с.
- Хомский Н. Аспекты теории синтаксиса. М.: Наука, 1972, — 482 с.
- Гладкий A.B. Формальные грамматики и языки. М.: Высш. шк., 1973, — 309 с.
- Тайна древних письмен. Проблемы дешифровки. М.: Наука, 1976.356 с.
- Еремеев А.П. О корректоности модели представления знаний для экспертных систем поддержки приняия решений// Изв. РАН. техническая кибернетика.- № 5, 1993 г.-С. 45−53.
- Вельская И.К. Язык человека и машина. М.: Радио и связь, 1969.235 с.
- Мышление и язык. М.: Знание. 1957.- 496 с.
- Лурия А.Р. Язык и сознание. М.: Мир, 1979.- 481 с.
- Раков В. И. Константинов И.О. Коммуникационные Функции и соответствующие свойства интеллектуальности зданий. М.: ВИНИТИ. Деп. № 3521-В96 от 06.12.1996. — 26 с.
- Предсказание из НЛО // Пикник. 1997. № 81.- С. 6.
- Николис Дж. Динамика иерархических систем. Эволюционное представление. М.: Мир, 1989. — 300 с.
- Вилли К. и Детье В. Биология. Биологические процессы и законы. -М.: Мир, 1975.- 526 с.
- Захаров В.Б., Мамонтов С. Г., Сивоглазов В. И. Биология: Общие закономерности. М.: Школа-пресс, 1995.- 260 с.
- Дьяченко Г. М. Область Таинственного. М.: Планета, 1992. — 206 .
- Перепелицын М.Л. Философский камень. М.: Агентство прав, культ, и соц. помощи, 1990. — 215 с.
- Клещев A.C. Представление знаний // Приют, информатика. 1983. Вып. 1. С. 49−94.
- Вагин В.Н. Дедукция и обобщение в системах принятия решений. -М.: Наука, 1989.-319 с.
- Нечеткие множества и теория возможностей. Последние достижения. /Под ред. P.P. Ягера. М.: Радио и связь, 1986.- 260 с.
- Robi№so№ J.A. Machi№e-Orie№ted logic based o№ the resolutio№ pri№ciple // J.ACM. 1965. Vol.12. P.23−41.
- Пойа Д. Математика и правдоподобные рассуждения. М.: ИЛ, 1957.428 с.
- Глушков В.М. О прогнозировании на основе экспертных оценок // Кибернетика. 1969.-№ 2. С.2−4.
- Шенк Р. Обработка концептуальной информации. М.: Энергия, 1990. -196 с.
- Dijk Т.А. va№ Studies i№ the pragmatics of discourse. The Hague, The №etherla№ds: Mouto№ Publishers. 1981. P.215−241.
- Почепцов Г. Г. Конструктивный анализ структуры предложения. Киев: Вища шк&bdquo- 1971. 443 с.
- Ракова К.И. Многозвенность сложноподчиненного предложения. Деп. в ИНИОН № 24 542 от 28.03.1986. М.: ИНИОН, 1986. — С.31.
- Панфилов В.З. Грамматика и логика. Грамматическое и логико-грамматическое членение простого предложения. М.- Л.: Наука, АН СССР, 1963, — 239 с.
- Николаева Т.М. Определенности неопределенности категория // Лингв, энцикл. словарь. — М.: Сов. энц., 1990.- С. 349.
- Ляпон М.В. Модальность // Лингв, энцикл. словарь. М.: Сов. энц., 1990.- С. 303−304.
- Zadeh L.A. Fuzzy Algorithm // I№-Format io№ Co№trol. 1968. Vol.12. № 2. P.94−102.
- Нечеткие множества в моделях управления и искусственного интеллекта /Под ред. Д. А. Поспелова. М.: Наука, 1996.- 305 с.
- Малпас Дж. Реляционный язык: Пролог и его применение /Под ред. В. В. Соболева. М.: Наука, 1990.-415 с.
- Прикладные нечеткие системы /Под ред. Т. Тэрано, К. Асам, М. Су-гэно. М.: Мир, 1993. — 205 с.
- Bucha№a№ В., Shortliffe Е. Rule based expert systems: The MYCI№ Experime№ts of The Sta№ford He№ristic Programmi№g Project. 1984. — 300 p.
- Shortliffe E., Bucha№a№ B. A Model Of i№exact reaso№i№g i№ medici№e // Math. Biscie№ces. 1975. Vol.23- P.351−379.
- Румбешт В.Б., Кожевников В. П. Интерпретация нечетких и недостоверных алгоритмов, описанных на языке ОСНА II Информационные технологиив строительстве. Белгород: Изд-во Белгор. ак-мии, 1996.- С.45−55.
- Раков В.И., Ананяи М. А. О некоторых свойствах вычислительных мо-(елей. Деп. в ВИМИ № ВМ. Д2 154 от 12.01.1976, М.: ВИМИ, Сб. реф. деп. рук., 976.- Вып.1. — С.36.
- Ананян М.А., Раков В., И., Пакулина Л. Г. Об организационном подходе: развитию средств вычислительной техники. Деп. в ВИМИ № ВМ. Д2 155 от 2.01.76. Сб. реф. деп. рук. М.: ВИМИ, 1976. -Вып.2.-С.112.
- Советов Б.Я., Яковлев С. А. Моделирование систем. М.: Высш. шк., 995.- 305 с.
- Основа автоматизации производства /Под ред. Ю. М. Соломенцева М.: Машиностроение, 1995.- 148 с.
- Веригин А. Н. Малютин С.А., Шашихин Е. Ю. Химико-технологические игрегаты- системный анализ при проектировании.- СПб.: Химия, 1996. 256 с.
- Нейрокомпьютеры и интеллектуальные роботы /Под ред. Н.М. Амосо-$а. Киев: Наукова думка, 1991. 400 с.
- Беркович С.Я. Клеточные автоматы как модель реальности: поиск но-$ых представлений физических и информационных процессов /Пер. с англ. М.: 4зд-во Моск. ун-та, 1993. — 200 с.
- Дюбуа Д., Прад А. Теория возможностей. Приложения к представле-шю знаний в информатике. Пер. с фр. М.: Радио и связь, 1990. — 288с.
- А.Н. Борисов, A.A. Алексеев, O.A. Крумберг. Модели принятия реше-шй на основе лингвистической переменной. Рига: Зинатне, 1982 256с.
- Dubois D., Prade H. Operatio№s i№ fuzzy valued logic // I№formatio№ i№d Co№trol. 1979. Vol. 43. — P. 224−240.
- Mizumoto M., Ta№aka K. Some properties of fuzzy sets of type 2 // №formatio№ a№d Co№trol, 1976. -Vol.31. P.312−340.
- Хювенен С., Сеппянен К. Мир Лиспа. Пер. С финск. — М.: Мир, 1990. — 297 с.
- Кауфман В.Ш. Языки программирования. Концепции и принципы М.: эадио и связь, 1993. — 432 с.
- Мелентьев Л.А. Системные исследования в энергетике: элементы тео-эии, направления развития. М.: Наука, 1983. — 455 с.