Синтез адаптивного и робастного управления исполнительными устройствами подводных роботов
Основные научные положения ирезультаты диссертационной работ докладывались автором и получили одобрение на 12 Всемирном конгрессе Международной федерации автоматического управления (ШО) (Сидней, 1993), 2-ой Европейской конференции по управлению (Гронингем, Нидерланды, 1993) — Первой Азиатской конференции по управлению (Токио, 1994), Международной конфеенции по океанотехнике «0СШ8'94» (Брест… Читать ещё >
Содержание
- 1. МАТЕМАТИЧЕСКАЯ МОДЕЛЬ ПОДВОДНОГО АППАРАТА-РОБОТА .Щ
- 1. 1. Системы координат, используемые в математической модели подводного аппарата-робота .Щ
- 1. 2. Кинематика подводного робота
- 1. 3. Динамика подводного робота .'
- 1. 4. Кинематика и динамика подводного манипулятора
- 1. 5. Движитель ПР и его коррекция
- 1. 5. 1. Математическая модель движителя ПР. ??
- 1. 5. 2. Нелинейная-и адаптивная коррекция -движителя ПР
- 1. 6. Выводы.'. ^
- 2. СИНТЕЗ НЕЛИНЕЙНЫХ СИСТЕМ ПРАВЛЕНИЯ ДВИЖЕНИЕМ ПОДВОДНОГО РОБОТА. Ш
- 2. 1. Математический аппарат, используемый для синтеза нелинейных систем управления .1'М
- 2. 2. Синтез нелинейной, системы управления ориентацией ПР
- 2. 3. Синтез системы управления/ движением ПР в скоростном режиме
- 2. 4. Синтез системы управления движением ПР в координатном режиме .№
- 2. 5. 'Сведение координатного режима движения ПР к скоростному режиму
- 2. 6. Выводы .4Н
- 2. 7- Сводная таблица законов управления ПР. Ж
- 3. АДАПТИВНОЕ .УПРАВЛЕНИЕ ДВИЖЕНИЕМ ПОДВОДНОГО РОБОТА .№
- 3. 1. Параметризация уравнений динамики ПР'.1Н
- 3. 2. Синтез адаптивного управления в скоростном режиме ПР.'
- 3. 3. Синтез адаптивного управления ориентацией ПР
- 3. 4. Синтез адаптивного управления ПР в координатном режиме
- 3. 5. Выводы ь Оиодиая' таблица naicouoiiадаптиш юро управления 1ТГ .17Z
- 4. УЧЕТ ДИНАМИКИ ДВИЖИТЕЛЕЙ ПРИ СИНТЕЗЕ УПРАВЛЕНИЯ ПР .ПЧ
- 4. 1. Синтез управления в скоростном режиме ПР учет динамики движителей)
- 4. 2. Синтез управления ориентацией’ПР учет динамики движителей) .'.Ш
- 4. 3. Синтез управления в координатном режиме ПР учет динамики движителей) .W
- 4. 4. Выводы" '.19С
- 4. 5. Сводная таблица законов управления ПР .W
- 5. АДАПТИВНОЕ УПРАВЛЕНИЯ ПР С УЧЕТОМ’ДИНАМИКИ ДВИЖИТЕЛЕЙ
- 5. 1. Адаптивное управление в скоростном режиме ПР .№
- 5. 2. Адаптивное управление ориентацией ПР
- 5. 3. Адаптивное управление в координатном режиме ПР .2/
- 5. 4. Сводная таблица законов адаптивного управления ПР учет динамики движителей) .2^
- 6. РОБАСТНОЕ И РОЕАСТНО-АДАПТИВНОЕ УПРАВЛЕНИЕ ПР И ПМ
- 6. 1. Робастное управление исполнительными приводами ПМ .г
- 6. 2. Робаотно — адаптивное управление исполнительными приводами ПМ .22*
- 6. 3. Робастно-адаптивное управление ПР при сигнально-параметрических возмущениях .23#
- 6. 4. Выводы
- 7. ДЕЦЕНТРАЛИЗОВАННОЕ РОБАСТНО-АДАПТИВНОЕ УПРАВЛЕНИЕ ПР И ПМ (ИДЕНТИФИКАЦИОННЫЙ ПОДХОД)
- 7. 1. Задача синтеза децентрализованного управления .л
- 7. 2. Робастно-адаптивное управление электроприводами ПМ дискретно — изменяющиеся параметры нагрузки)
- 7. 3. Робастно-адаптивное управление электроприводами ПМ непрерывно — изменяющиеся параметры нагрузки)
- 7. 4. Идентификационные свойства скользящего режима .?
- 7. 5. Простой алгоритм параметрической идентификации вязкого сопротивления
- 7. 6. Параметрическая идентификация подсистем ПР по экспериментальным данным .2*
- 7. 7. Выводы .¦
- 8. ДЕЦЕНТРАЛИЗОВАННОЕ РОБАСТНО-АДАЛТИВНОЕ ЖРАВЛЕНМЕ ПР И ПМ С ЭТАЛОННЫ ПАРАМЕТРОМ СКОЛЬЖЕНИЯ .29В
- 8. 1. Робастно-адаптивное управление с эталонным параметром скольжения
- 8. 2. Релейное робастно-адаптивное управление с эталонным параметром скольжения .3*
- 8. 3. Линейность функции переключения и предельные возможности системы
- 8. 4. Релейное робастно-адаптивно'е управление с нелинейными поверхностями скольжения
- 8. 5. Выводы
Синтез адаптивного и робастного управления исполнительными устройствами подводных роботов (реферат, курсовая, диплом, контрольная)
В.1. Современное состояние развития систем управления подводных роботов. Актуальность работы.
Всестороннее исследование и освоение Мирового океана в настоящее время, безусловно, является одной из центральных проблем, стоящих перед современной наукой и практикой.
Изучение и использование минеральных, энергетических и пищевых ресурсов океана, решение проблем транспорта, обеспечение обороноспособности страны, возведение шельфовых сооружений, обслуживание газои нефтепроводов — это лишь некоторые проблемы, связанные с океаном.
Огромное значение имеют фундаментальные научные исследования океана, имеющие своей целью более ясное понимание процессов и явлений, происходящих в нем, их практическое использование. Это изучение термальных, гравитационных, магнитных полей, акустических, механических, химических свойств толщи воды и дна, измерение параметров течений, решение проблем гидробиологии, геологии, картографии и многое другое.
Решение проблем, связанных с проведением как фундаментальных исследовательских, так и прикладных работ, требует создания и применения соответствующих методов и технических средств.
Одним из наиболее перспективных научно — практических направлений, ориентированных на изучение и освоение потенциала Мирового окена, является подводная робототехника. Подводные аппараты — роботы позволяют обеспечить выполнение• инженерных, научно-исследовательских, поисковых, аварийно — спасательных и других видов работ в толще воды и вблизи дна.
Значительный вклад в развитие современной робототехники, и, в том числе, подводной робототехники, внесен российскими учеными М. Д. Агеевым, И. И. Артоболевским, П. Н. Беляниным,.
A.Ф.Верещагиным, А. Н. Дмитриевым, М. Б. Игнатьевым, И. Б. Иконниковым, Л. В. Киселевым, П. Д. Крутько, Ф. М. Кулаковым, В. С. Кулешовым, Н. А. Лакотой, В. С. Медведевым, И. М. Макаровым, Д. Е. Охоцимским, E.H.Пантовым, Е. П. Поповым, Е. С. Пятницким, А. В. Тимофеевым,.
B.И.Уткиным, В. А. Челышевым, Ф. Л. Черноусько, Е. М. Юревичем, А. С. Ющенко, В. С. Ястребовым и другими, а также их зарубежными коллегами A.K.Bejcay, R. Cristi, S. Dubowski, 1. freund, Т.I.Poseen, K.R.Goheen, A.J.Healey, E.R.Jeiferys, N. Kircanski, O.S.G.Lee, J.Y.S.Luh, I.A.Papoulias, R.P.Paul, M. Renaud, J.J.I.Slotine, T.J.Tarn, M. Yucobratovio, M.W.Walker, D.R.Yoerger и др.
He останавливаясь подробно на существующих классификациях подводных роботов, с которыми можно познакомиться, например, в [1,92,94,97,993, выделим из них два важных класса: автономные подводные аппараты — роботы и рабочие подводные роботы. Для обоих классов характерным является то, что роботы осуществляют свое пространственное движение в толще воды за счет собственных движителей.
Автономные подводные роботы, которые также называют информационными, предназначены главным образом для проведения геофизических, гидроакустических, биологических, геологических и других исследований, а также для сбора и первичной обработки соответствующих данных.
Рабочие подводные роботы, как правило, оснащены манипуляторами. Наличие манипуляторов у подводных аппаратовроботов позволяет им осуществлять аварийно — спасательные работы, резку, сварку, сборку и демонтаж подводного оборудования, обслуживание шельфовых буровых установок, нефтеи газопроводов, донных добывающих машин, специальной аппаратуры, взятие проб грунта, изучение его физических, химических свойств и многое другое. и предназначены для выполнения операций сборки, установки объектов, их демонтажа, транспортировки и других технологических операций с объектами.
Информационные подводные роботы в процессе выполнения работ обычно должны двигаться по плавным пространственным траекториям. Поэтому форма корпуса такого робота близка к веретенообразной, вытянутой вдоль направления движения, т. е. к форме торпеды, и обеспечивает хорошие гидродинамические характеристики [1].
В отличии от предыдущих, рабочие подводные роботы не имеют преимущественных направлений движения. Выполняемые ими рабочие операции могут требовать осуществления движения в произвольном направлении, с произвольными скоростями и ориентацией в пространстве. При этом возможны достаточно произвольные движения манипулятора, которым оснащен подводный робот. Обычно рабочие подводные роботы связаны соединительным кабелем с обеспечивающим судном, хотя возможны и другие способы организации их взаимодействия [12,13].
В дальнейшем основное внимание уделяется рабочим подводным роботам, оснащенным манипуляторами. Для краткости будем использовать термин «подводный робот» .
Создание подводных роботов требует привлечения методов самых различных научных дисциплин: механики, гидродинамики, энергетики, теории управления и других. Это объясняется тем обстоятельством, что в состав подводных роботов входит множество разнообразных (.'истом, к числу которых относятся навигационная, информационно-измерительная, управляющая и т. д. При этом разработка ряда систем подводного робота может быть выполнена относительно независимо, автономнопроектирование же других систем подводного робота требует тесной взаимной увязки, т. е. по существу представляет собой единую проблему. Таким образом, очевидно, что проектирование подводных аппаратов-роботов является комплексной инженерной проблемой.
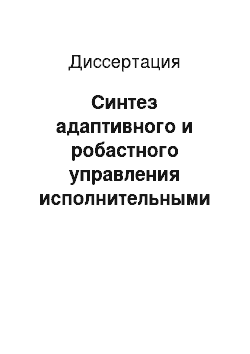
К числу наиболее важных систем подводного робота относится система управления его пространственным движением, а также движением манипулятора (или манипуляторов). В современном представлении система управления подводного робота имеет иерархическую структуру, содержащую несколько уровней.
Иерархические уровни управления подводным роботом.
Рис.В.1.
100.103,111,125−1273 (рис.В.1).
Высший уровень системы управления осуществляет принятие решений и планирует поведение подводного робота на основе задания, полученного от человека, а также на основе данных, предоставляемых сенсорной системой.
Следующий уровень выполняет распознавание окружающей среды, ее моделирование, а также анализ сенсорной информации в соответствии с планом, выработанным на высшем иерархическом уровне системы управления.
Указанные два уровня относятся к интеллектуальному управлению и их реализация предполагает общение человека-оператора с интеллектуальной вычислительной системой.
Далее следует уровень планирования и программирования движения робота. Здесь выполняется выработка целенаправленных движений исполнительных механизмов подводного робота с учетом конструктивных ограничений и препятствий.
М наконец, уровень управления программным движением подводного робота (исполнительный уровень), на котором осуществляется управление исполнительными устройствами аппарата, обеспечивающее в недетерминированных условиях фактическое осуществление требуемого целенаправленного движения, запрограммированного на более высоком иерархическом уровне.
Создание системы управления подводного робота и в первую очередь создание исполнительного контура управления, как отмечается в [127], является одной из наиболее сложных и актуальных проблем. С ее решением и связана выполняемая диссертационная работа.
Подводный аппарат — робот как объект управления имеет ряд существенных особенностей, в связи с которыми решение задачи синтеза его управляющей системы оказывается сложной проблемой.
Прежде • всего, управление подводным роботом должно выполняться в условиях значительной параметрической и структурной неопределенности. В первую очередь эта неопределенность связана с неточным знанием параметров робота-носителя, манипулятора и захваченного им объекта. Характеристики последнего — масса, габаритные размеры и прочее — заранее могут быть просто неизвестны. В. значительно большей ' мере неопределенность обусловлена влиянием водной среды, в которой функционирует подводный робот. Расчет присоединеных масс, моментов инерции, гидродинамических сил и моментов, действующих на робот-носитель и манипулятор в вязкой водной среде чрезвычайно затруднен ввиду сложности формы корпуса подводного робота, произвольного изменения пространственной конфигурации манипулятора, априорной неопределенности в параметрах манипулируемого объекта. Указанные характеристики сложным образом зависят от ориентации подводного робота, угловой¦скорости ее изменения, условий обтекания корпуса аппарата и манипулятора и других факторов [88,107]. Практически может быть рассчитан, или оценен, лишь довольно широкий диапозон 4Ъ множество неопределенности), в котором находятся параметры подводного робота.
В отличие от информационных подводных роботов, для рабочих подводных роботов, снабженных манипуляторами, ввиду разнообразия вариантов компоновки оборудования и возможных траекторий движения расчеты их параметров на основе теоретических и экспериментальных исследований являются чрезвычайно трудоемкими и дорогостоящими.
Следующая особенность подводного робота как объекта управления — его многомерность и' значительная взаимосвязь отдельных подсистем. Кинематика движущегося в водном пространстве робота — носителя описывается системой дифференциальных уравнениями 6-го порядка. Аналогичным образом описывается его динамика. В случае, когда нельзя пренебречь неидеальностью движителей подводного робота, их уравнения должны быть внесены в общую математическую модель. Наконец, п — звенный подводный манипулятор представляется, как минимум, 2#п дифференциальными уравнениями.
Существенная нелинейность и нестационарность уравнений движения подводного являются дополнительными факторами, затрудняющими решение задачи синтеза его системы управления.
Факторы сложности управления подводным роботом, а также перспективные пути их преодоления, следуя [121], сведем в таблицу (табл.В.1.).
Признанными активно развивающимися научными направлениями,.
Факторы сложности управления подводным роботом.
Табл.В.1.
Фактор Трудности, связанные с фактором Пути преодоления.
Большая размерность векторов входа, выхода и состояния мат. модели подводного робота Значительные затраты по реализации управления подводным роботом Упрощение математической модели и цели управления подводным роботом.
Значительная взаимосвязь локальных подсистем ПР it Декомпозиция матем. модели ПР. Децентрализация управления.
Существенная нелинейность гидродинамических характеристик, кинематики и динамики ПР Снижение качества управления ПР, потеря устойчивости системы управления Компенсация нелиней-ностей. Усложнение алгоритмов управления.
Неопределенность, нестационарность параметров ПР и влияния среды Непредсказуемое изменение динамики ПР Применение адаптивных и робастных алгоритмов управления.
Недостаток информации о динамике ПР Снижение качества и устойчивости процессов управления Идентификация параметров и применение наблюдателей вектора состояния ПР ориентированными на преодоление 'отмеченных трудностей при решении задачи синтеза систем управления, являются адаптивный и робастный подходы. Их применение к. подводным:. роботам в сочетании с принципами декомпозиции системы и 'децентрализации управления-позволит синтезировать''управление, которое обеспечивает высокое качество осуществления программного пространственного движения за счет приспосабливания, или адаптации, — кизменяющимся условиям, либо грубости, нечувствительности •(.робастности) по отношению к параметрической' и. структурной неоцределенности.
Среди адаптивных, систем предпочтение в работе будет отдано беспоисковым-системам, т.к. 'они .обладают высоким' быстродействием и ориентированы да.'работу в реальном масштабе, времени [34,35,85, 104,105,112,120−125,165,174]. Термин ." робастность" является достаточно размытым.' .'В'.нашем случае он 'будет применяться к системам с-'управлением релейного’типа, в’том 'числе и к системам с переменной структурой, организация скользящих или близких к ним процессов в которых, делаетт.' грубыми. к структурно параметрическим неопределённости [26,28,29,33−35,106,110,114−116, 176−184,192,193]- Как показано/в [121], отличие между адаптивными и робастными (.в' указанном смысле) системами достаточно условно.
Значительный вклад в исследование систем рассматриваемых классов, наряду с. упомянутыми ранее, внесли' российские ученые М. А. Айзерман, Л.Т.АЩепков, Е.А.Варбашин*' Ю.А.-Борцов, А. А. Воронов, Д. П. Деревицкий, ¦ С.В.Емельянов"-''. • С. Д. Земляков, В. Я. Катковник,.
A.А.Красовский, О. Ю. Кульчицкий, Б. Н. Петров, Н. Д. Поляхов,.
B.В.Путов, В. Ю. Рутковокий, В. В. Солодовников, А. А. Стоцкий, В. Н. Фомин, А. Л. Фрадков, Я. З. Цыпкин, И. Б. Юнгер, Н. Б. Ядыкин, В. А. Якубович и другие, а также зарубежные ученые B.D.Anderson, K.J.Astrom, A. Isidori, P. Kokotovio, I.D.Landau, K.S.Narendra, R. Ortega, G.N.Saridis и другие.
Анализ научно-технической литературы показывает, что в общем огромном объеме исследований по робототехнике доля публикаций, посвященных собственно проблемам построения систем управления рабочих подводных роботов (ПР) и подводных манипуляторов (ПМ), относительно невелика.
В монографиях [44,97,99,126] рассмотрены важные, общие проблемы построения ПР, в частности, структура ПР, математические модели, применяемые для исследований, вопросы построения систем управления пространственным движением аппаратов — роботов и др. Отмечаются высокая сложность уравнений динамики ПР и ПМ, а также значительные трудности, возникающие из-за высокой степени нелинейности, неопределенности и многомерности объекта при синтезе систем управления исполнительными устройствами робота. Утверждается, что нелинейная динамическая модель робота трудна для практического использования и более полезной может оказаться линеаризованная модель для некоторых частных режимов движения ПР. Однако в результате такой линеаризации могут потеряться существенные свойства модели, ее адекватность движению ПР.
В монографии [1] и других работах сотрудников Института проблем морских технологий ДВО РАН также рассмотрены теоретические и практические. аспекты пос-троения подводных аппаратов ' - ' роботов, главным ' образом, информационного типа. Работы’отличаются выраженной • практической направленностью. При синтезе системы управления движением на основе нелинейных моделей, как правило, предполагалась независимость каналов управления, что позволяло. выполнить декомпозицию большой' .системы, снизитьразмерности задач и соответственно упростить их решение. Специфика режимов движения информационных подводных роботов, особенности их формы вполне оправдывает. такую декомпозицию задачи, однако в общем. случае, .динамика сепаратных каналов управления движением ПР взаимосвязана и это • должно быть учтено при синтезе системы управления. Близкие подходы к построению ПР использовались в [2,3,80,130,131].
В [127] рассмотрены вопросы построения систем управления ПР. В частности, показана необходимость разработки алгоритмов и систем управления, обеспечивающих достижение целей управления в условиях значительной неопределенности, вносимой внешней водной средой. Подчеркивается особая важность создания систем (алгоритмов) управления исполнительного уровня ПР. Авторами разрабатывается адаптивный подход к проблеме синтеза управления движением ПР, однако концепция адаптации применяется главным образом к построению программных траекторий ПР, а не к способам их осуществления.
В [88] рассмотрены также вопросы построения систем управления ПР. Как и в [97,99], признается сложность непосредственного использования нелинейной модели аппаратаробота и выполняется переход к линеаризованным моделям ¦' и, фактически, к линейным методам синтеза (модальное управление).
В монографий [79,101] рассмотрены, в частности, проблемы синтеза адаптивных систем управления ПР. Основной подход связывается с одновременным применением идентификации неопределенных параметров робота и управлением им (непрямое адаптивное управление). В работе также предполагается использование упрощенных линеаризованных моделей ПР, что сужает область применения получаемых результатов.
В исследовании [75,76] строится полная математическая модель частного подводного аппарата — робота с двухзвенным манипулятором. Динамика носителя и ПМ взаимосвязаны. В работе выполняется синтез системы управления с переменной структурой для отдельных степеней подвижности ПР. Такой выбор обосновывается, как подчеркивают авторы, робастными свойствами этого класса систем по отношению к структурно — параметрической неопределенности управляемого объекта. 5 Однако быстродействие синтезированных систем оказывается невысоким, т.к. положение линии скольжения выбирается по наименее благоприятным значениям параметров робота. Быстродействие данной и других близких по характеру управления систем можно было бы улучшить, используя идеи движущихся линий скольжения [110,134] или нелинейных поверхностей скольжения [28,96,182], которые, однако, требуют значительной доработки.
В [108,125] рассматриваются вопросы, связанные с построением математических моделей подводных роботов — манипуляторов, а также соответствующие задачи, возникающие при управлении ПР. Показано, что влияние внешней водной среды существенным образом усложняет динамику ПР, внося значительную неопределенность и дополнительные нелинейности в систему.
В зарубежной научно — технической литературе вопросам построения систем управления ПР и ПМ также уделяется большое внимание [129,136,138,151,156−163,166,168,170,172,173,186,187, 190,191,195, 196, 198−200]. Практически во всех работах также Отмечается сложность решения проблемы синтеза алгоритмов и систем 'управления ПР из-за их многомерности, неопределенности, нелинейности и других особенностей. Основные подходы, направленные на решение указанных проблем, связываются главным образом с адапативным, робастным управлением, их комбинациями, а также с системами, построенными на принципах теории нечетких множеств (так называемые fuzzy — контроллеры) и нейронных сетях [167,171,194,198−200].
В [151] рассмотрены вопросы реализации непрямого адаптивного управления движением небольшого ПР. Предложено сочетание стандартного адаптивного алгоритма управления и супервизорной логики. Параметры ПР оцениваются в реальном масштабе времени (на основе рекурсивного или нормализованного метода наименьших квадратов, метода минимизации ошибки выхода или обобщенного фильтра Калмана) и далее используются для настройки регулятора. Супервизорная логика, как указывается авторами, предназначена для определения моментов, когда следует осуществлять адаптацию, а также для выбора действий системы в случае, когда адаптивный контроллер не справляется с поставленной задачей. Основной способ исследования в данной работе состоит в моделировании динамики ПР, учитывающей также нелинейность исполнительного движителя. К сожалению, выбранная авторами математическая модель ПР чрезвычайно упрощена. Она линейна и развязана по степеням подвижности ПР, изменение угловых координат предполагается малым.
В [158−160] рассматриваются вопросы, связанные с построением многомерных самонастраивающихся регуляторов для ПР. Необходимость использования самонастройки (адаптации) также объясняется сложной природой движения ПР в вязкой среде. Значительное влияние на динамику ПР, кроме прочего, может вноситься за счет установки на ПР нового дополнительного оборудования — датчиков, телекамер, изменения положения и/или нагрузки манипуляторов и 'Т.д. Проектирование традиционных систем управления требует точной модели ПР и его движителей. В тоже время составление достаточно точной математической модели ПР длительно и дорогостояще. Поэтому '' авторы предлагают адаптивный и робастный варианты регуляторов ПР, которые позволили бы преодолеть отмеченные трудности. Однако выбранная авторами модель ПР также линейная и чрезвычайно упрощенная. Обоснований такого упрощения не приводится. Кроме того, не поясняется, почему предлагаемая система обладает робастными свойствами.
Yoerger и Slotine [196] синтезируют и исследуют робастные алгоритмы управления ПР на основе нелинейных моделей динамики и организации скользящих режимов. Демонстрируется эффективность предлагаемых законов управления при наличии существенной неопределенности s моделях и присутствии неизмеримых возмущений, оказываемой внешней водной средой, соединительным кабелем и др. Реализация алгоритмов управления требует незначительных вычислительных ресурсов, -что также весьма привлекательно для инженеров — практиков. В случае, когда высокочастотные переключения, возникающие в скользящем режеме работы, являются нежелательными, предложено заменять релейные переключающие элементы (типа sign (x)) усилителями с большим коэффициентом передачи и насыщением (функция sat (х)). В целом, показана перспективность данного класса систем для точного траекторного управления ПР.
Этими же авторами показано, что в ряде случаев нельзя пренебрегать динамикой исполнительного движителя ПР [195].
Последняя такова, что способствует возникновению устойчивых колебаний, наблюдаемых в. движении ПР и отмечаемых рядом авторов. Для предотвращения автоколебаний в [195] предложены варианты (в том числе и адаптивной) компенсации нежелаемой динамики движителя ПР.
В [162] исследуются многомерные системы управления автономных ПР на основе скользящих режимов. Желаемая динамика процессов назначается выбором параметров поверхностей скольжения. Модели отдельных подсистем ПР также ¦ линеаризованы. Отмечается, что влияние нелинейностей, неопределенностей, возмущений может быть эффективно компенсировано применением предложенной стратегии управления. Так же, как и в [196], для устранения нежелательных высокочастотных переключений предлагается замена функций типа sign (.) на подходящую гладкую функцию.
В работе [136] рассматривается задача управления автономным ПР в вертикальной плоскости. Исследуется возможность совместного использования адаптивного управления и управления на основе скользящих режимов. >Управляющий сигнал формируется в виде обратной связи по компонентам вектора состояния с настраиваемыми коэффициентами, а также сигналам знакового типа. Предполагается, что п уравнениях динамики ПР выделены линейная часть. «Оставшаяся» часть рассматривается в качестве возмущения, которое должно парироваться релейными компонентами сигнала регулятора. Для реализации предложенного закона управления должна .быть известна оценка нормы упомянутой нелинейной части, что в общем случае может быть затруднительно. В работе, к сожалению, не обсуждается, каким образом такая замена сказывается нক качестве процессов в системе управления движением ПР.
Tarn и др. [186,187]. рассмотрели задачу управления автономным ПР с манипулятором. Предлагаемый подход обладает большой общностью. ПР с ПМ изучается как единая динамическая система, подобно [75,76]. Приэтом размерность задачи оказывется достаточно большой. В предложенной модели не учитывается динамика движителей ПР — носителя, а также не обсуждается варианты упрощения законов управленияисполнительными устройствами! робота.
Как уже отмечалось' ранее, в определенной степени альтернативными адаптивным и робастным алгоритмам (системам) управления ПР являются появившиеся сравнительно недавно iussyконтроллеры и нейронные сети [ 167,171,194,198−200]. Первые, на наш взгляд, являются аналогами так называемых логических корректирующих устройств [32], усовершенствоваными 'на основе теории нечесткой логики, развитой Л.Заде. Управляющий сигнал формируется в виде комбинации различных выбранных составляющих в зависимости от степени принадлежности вектора переменных системы тому илииному множеству пространства состояния. Имеется определенное сходство работы устройства с элементарной управляющей экспертной системой, работающей в соответствии с предписанными правилами.
Второй из упомянутых типов управляющих систем — нейронные сети — обладает, на наш взгляд, значительно большей общностью [171]. Нейронные сети представляют собой многослойную структуру, содержащую множество взаимосвязанных элементов. Степени взаимосвязи, или весовые коэффициенты, внейронной сети, входящей в состав системы, могут настраиваться таким образом, чтобы достигать цели управления. В ряде работ утверждается, что в сравнении с традиционными линейными регуляторами, нейронные сети обеспечивают хорошие робастные свойства системы управления ПР при вариации динамики исполнительных движителей и параметрической неопределенности модели [198−200 ].
Преимуществами fuzzy — контроллеров и нейронных сетей, по мнению исследователей, является отсутствие необходимости в детальных математических моделях объектов управления, в частности, ПР. Однако отношение инженеров — разработчиков ПР к указанным, по всей видимости, перспективным структурам, в основном, пока достаточно сдержанное. Это объясняется главным образом тем, что в последних оказываются еще недостаточно проработанными теоретически такие важные вопросы, как, например, устойчивость процессов, диссипативность, качество и многое другое. Здесь пока отсутствует та необходимая степень строгости получения теоретических результатов, которая достигнутав других областях, теории управления.
В завершение приведенного краткого обзора приведем некоторые из концепций, принятых в международном проекте UNION. ESPRIT [1913, который объявлен в 1995 г. и объединяет исследовательские группы четырех европейских университетов и трех научных центров. Основная идея проекта состоит в разработке, развитии и интеграции подсистем подводных роботов. К числу важнейших целей проекта, наряду с планированием сценариев работы ПР (миссии), разработкой навигационных систем и др., относится также создание и исследование систем управления движением роботаносителя и манипуляторов. В качестве перспективных для достижения целей проекта выбраны робастный и адаптивный подходы. Отмечается, что ввиду сложности получения уравнений динамики ПР и ПМ очень полезными могут оказаться концепции декомпозиции системы в целом и децентрализации управления, что позволит заметно упростить структуры регуляторов, и математическое моделирование движения робота.
Таким образом, дальнейшее развитие и систематизация результатов по применению адаптивного и робастного управления к исполнительным устройствам подводных роботов является актуальным.
В.2. Цель и задачи диссертационной работы.
Целью диссертационной работы является решение научно прикладной проблемы, заключающейся в обобщении, развитии, разработке и исследовании адаптивных и робастных систем и алгоритмов управления исполнительными' устройствами подводных роботов и манипуляторов, эффективных в сложных условиях их функционирования.
Для достижения цели исследования в работе ставятся и решаются следующие основные задачи:
1. Обоснование, разработка и развитие подходов к построению систем управления исполнительными устройствами ПР и ПМ, которые обладают высокой эффективностью при наличии неопределенности, нелинейности и многомерности, определяемых особенностями условий функционирования подводных роботов.
2. Синтез нелинейных алгоритмов и систем управления на основании полной номинальной модели ПР, обеспечивающих предписанную динамику процессов для всех основных режимов его движения.
3. Разработка адаптивных модификаций нелинейных алгоритмов и систем управления ПР, обеспечивающих заданное качество переходных процессов при существенной параметрической неопределенности в динамике подводного робота.
4. Синтез робастных и робастно — адаптивных алгоритмов и систем управления ПР и ПМ, обеспечивающих' высокое качество и грубость переходных процессов при параметрической неопределенности и действии внешних сигнальных возмущений.
5. Синтез средств нелинейной и адаптивной коррекции исполнительных движителей ПР, обеспечивающих близость их динамики к заданной эталонной.
6. Построение на основе сочетания принципов систем с переменной структурой и непрямой адаптации алгоритмов и систем децентрализованного робастно — адаптивного управления исполнительными устройствами ПР и ПМ, эффективных в условиях неопределенности параметров нагрузки при дискретном и непрерывном характере ее изменения.
7. Синтез робастно — адаптивных алгоритмов и систем децентрализованного (с еталовнным параметром скольжения) управления исполнительными устройствами ПР и ПМ, в том числе синтез субоптимальных по быстродействию систем, при наличии структурно — параметрической неопределенности.
8. Разработка и развитие методов параметрической идентификации, а также их применение для идентификации различных подсистем реальных подводных роботов.
Новые научные результаты, получаемые в ходе решения указанных выше задач, подробно раскрываются в исследовании и выдвигаются соискателем на защиту.
В.З. Практическая ценность и реализация результатов.
Практическая ценность полученных в диссертации результатов заключается в разработке систем (алгоритмов) управления, позволяющих повысить точность, качество, быстродействиеи, в целом, эффективность выполнения работ подводными роботами,.
Г/.
Tv" оснащенными манипуляторами. Применение разработанных адаптивных и робастных структур управления, принципиально ориентированных на имеющуюся в динамике ПР и ПМ структурно — параметрическую неопределенность, позволяет значительно сократить объем работ, связанных с проектированием, испытаниями и настройкой систем, и, следовательно, уменьшить стоимость и сроки разработки подводных роботов при улучшении качества их функционирования.
Проводимые исследования выполнялись в рамках основных научно — исследовательских работ Дальневосточного государственного технического университета в соответствии с целевой программой Минвуза СССР на 1978;1990 гг. по комплексной проблеме «Роботы и робототехнические системы» (приказ N 136 от 2.2.79) — комплексной программой «Роботы» Минвуза РФ на 1980 — 1985 гг.- межвузовской целевой комплексной программой «Робототехнические системы и автоматизированные производства «'на 1987;1990 гг. (задания N 02.04.09, 08.01.18, 08.01.19, 08.04.10) — комплексными программами ГКНТ СССР и АН СССР 0.16.09 и 0.16.10 на 1986 — 1990 гг. (задания 27.01.П, 27.04.П) — межвузовской научно — технической программой «Робототехника для экстремальных сред» на 1996;1997 гг.- межвузовской научно — технической программой «Робототехнические системы» на 1998;2000 гг.
Внедрение результатов осуществлялось при непосредственном участии автора в ходе выполнения госбюджетных и хоздоговорных научно-исследовательских работ, а также работ по научно-техническому сотрудничеству университета с другими предприятиями и организациями.
В Конструкторском Бюро «Дальнее» (г.Владивосток) при создании серии подводных аппаратов — роботов внедрены разработанные в диссертации методы синтеза адаптивных и робастных систем управления исполнительными устройствами ПР и ПМ.
В НИИ радиоэлектронных систем прогнозирования чрезвычайных ситуаций (г.Санкт-Петербург) результаты, полученные. в диссертационной работе, использованы при разработке структуры и математическом моделировании системы управления подводного робота — носителя специализированной аппаратуры подводной лаборатории.
В НИИ технологии и организации производства (г.Иркутск) внедрен электропривод для универсальных загрузочных устройств, построенный на основе предложенной адаптивной системы с переменнной структурой. Системы данного класса внедрены также при разработке специального манипуляционного робота в НИИСМ при МГТУ им. Н. Э. Баумана и Институте проблем управления (г.Москва) в составе программно-аппаратных средств для системы управления движением робота ТУР-10.
Отдельные результаты, полученные в диссертационном исследовании, используются также при подготовке научных кадров высшей кважфикации в рамках аспирантуры ДВГТУ и в учебном процессе на кафедрах «Информационные системы управления» и «Автоматизации управления в технических системах» в курсах «Основы теории управления», «Теория автоматического управления», «Методы оптимизации систем», «Электроприводы роботов», «Системы управления роботов» .
В.4. Апробация работы и публикации.
Основные научные положения ирезультаты диссертационной работ докладывались автором и получили одобрение на 12 Всемирном конгрессе Международной федерации автоматического управления (ШО) (Сидней, 1993), 2-ой Европейской конференции по управлению (Гронингем, Нидерланды, 1993) — Первой Азиатской конференции по управлению (Токио, 1994), Международной конфеенции по океанотехнике «0СШ8'94» (Брест, Франция, 1994), Симпозиуме НАС по проектированию робастных систем управления (Рио-де-Жанейро, 1994), 3-й Европейской конференции по управлению (Рим, 1995)., 24 Международном научном коллоквиуме (Ильменау, ГДР, 1989), 5 Международной конференции по искусственному интеллекту и информационно — управляющим системам роботов (Штребско Плесо, Чехословакия, 1989), 7-й Международной конференции по современной робототехнике (Сент-Фелью, Испания, 1995), 4-ой Международной конференции по интеллектуальным автономным системам (Карлсруэ, Германия, 1995), 3-й Симпозире.
IMC по проектированию нелинейных систем управления.(Тахо Сити, США, 1995), 4-й'Международной конференции.-IEEE по приложениям теории управлений (Нью-Йорк, 1995).-,'• Международной конференции «Мехатроника-96» ,•(Гуимарес, Португалия, 1996') а также на 4-й Всесоюзн. конференции «Проблемы научных исследований в области изучения и освоенния Мирового 'океана-» ' (Владивосток, 1983), 3-м и 4-м Всесоюзн. совещаниях по робототехническим системам (Воронеж., 1984, Киев, 1987.), Всесоюзной школе «Технические средства и методы исследования Мирового океана „(Геленджик, 1987), Республ.научн.-техн. конференции.“ Роботизация и гибкие автоматизированные’производства» (Черновцы, 1986) Всесоюзном научн.-практ. семинаре «Опыт использования распределенных систем управления технологическими процессами и. производством «(Новокузнецк, 1986), -Всесоюзн. ' совещании-семинаре «Проблемы оптимизации и управления динамическими' системами в машинои приборостроении «(Владивосток, 1987), X Всесоюзной научн.-техн. конференции по проблемам автоматизированного. электропривода (Воронеж, 1987), -Дальневосточной научно — практич. конференции «Проблемы.транспорта Дальнего Востока «¦.(• Владивосток, 1995) и других конференциях и семинарах.• '. .
Всего по проблематике диссертационного исследования автором опубликовано в изданиях, соответствующих—требованиям ВАК РФ, 68 работ, в том числе 22. авторских свидетельства (-.патента) на изобретения. «.• ' • .
В. 5″. Структура и краткое содержание работы Диссертационная работа состоит из введения, восьми разделов, заключения, списка литературы, включающего 200 наименований, и.
8.5 Выводы.
1. Предложен и развит новый перспективный класс робастноадаптивных систем с эталонным параметром скольжения, а также подход к их синтезу. Сущность подхода заключается в организации адаптивной настройки пространственного положения поверхностей скольжения таким образом, чтобы характеризующий этот режим движения параметр скольжения был равен зараннее заданному значению, близкому к экстремальному, при вариациях параметров управляемого объекта.
2. Разработаны и: исследованы алгоритмы и системы децентрализованного робастно — адаптивного управления (с эталонным параметром скольжения) исполнительными устройствами ПМ и ПР. В сравнении с традиционными системами с переменной структурой предложенные законы децентрализованного управления позволяют существенно улучшить качество процессов в системе.
3. Синтезированы и исследованы релейные робастно адаптивные системы управления с эталонным параметром скольжения для исполнительных устройств ПМ. Показано, что предложенные законы децентрализованного управления обладают простой структурой и обеспечивают переходные процессы в системе, по характеру близкие к оптимальным по быстродействию (субоптимальные), при наличии структурно — параметрической неопределенности.
4. Показано, что применение только линейных поверхностей скольжения с адаптивно настраиваемым пространственным положением ограничивают возможности дальнейшего совершенствования предложенного нового класса систем управления. Разработаны и исследованы релейные робастно — адаптивные системы децентрализованного управления исполнительными приводами ПМ с нелинейными поверхностями скольжения.
ЗАКЛЮЧЕНИЕ
.
Таким образом, диссертационная работа представляет собой обобщение и решение научно — прикладной проблемы, заключающейся в дальнейшем расширении, развитии, разработке и исследовании классов адаптивных и робастных систем и алгоритмов управления исполнительными устройствами подводных роботов и манипуляторов. Полученные в ходе выполнения работы управляющие структуры эффективны в сложных, экстремальных условиях функционирования ПР и ПМ — нелинейности и нестационарности, многомерности и структурно — параметрической неопределенности объектов управления. Результаты, связанные с решением этой проблемы, имеют важное народно — хозяйственное значение, поскольку позволяют повысить эффективность и расширить область применения средств подводной робототехники и общей робототехники в целом.
В работе получены следующие основные научные результаты:
1. В диссертации выполнено обоснование, разработка и развитие адаптивного и. робастного подходов к синтезу систем автоматического управления исполнительными устройствами подводных роботов и манипуляторов. Применение синтезированных управляющих структур позволяет существенно улучшить качество процессов в системе управления и повысить эффективность использований ПР и ПМ в условиях значительной нелинейности, многомерности, нестационарности и структурно — параметрической неопределенности описывающих их математических моделей.
2. Разработаны методы структурно — параметрического синтеза нелинейных систем и алгоритмов управления, основанные на полной номинальной модели ПР и обеспечивающие заданную эталонную динамику по всех основных режимах пространственного движения подводного робота. Поэтапное выполнение синтеза предполагает построение нелинейной обратной связи, обеспечивающей декомпозицию и линеаризацию системы относительно дополнительно введенного управления, закон формирования которого далее уточняется на основе требований к переходным процессам.
3. Разработаны алгоритмы и системы адаптивного управления ПР на основе модификации управляющих структур, синтезированных по нелинейной номинальной модели. Построенные системы (алгоритмы) обеспечивают заданное эталонное качество воспроизведения программных траекторий в основных режимах пространственного движения ПР при значительной параметрической неопределенности его динамики.
4. На основе общих моделей ПР и ПМ синтезированы новые классы робастного и робастно — адаптивного управления, обеспечивающие заданное высокое качество переходных процессов и грубость систем к структурно — параметрической неопределенности. Работоспособность систем (алгоритмов) обеспечивается как применением мажорирующих оценок неопределенных параметров и назначением желаемой (не обязательно линейной) динамики за счет выбора вспомогательных функций, так и адаптивной настройкой на уровни структурных и параметрических возмущений.
5. Синтезированы средства нелинейной и адаптивной коррекции динамических свойств исполнительных движителей ПР, что позволяет обеспечить близость переходных процессов к желаемым и в рамках концепций декомпозиции системы и децентрализации управления упростить процедуры синтеза.
6. Разработан и исследован новый класс робастно — адаптивных систем децентрализованного управления исполнительными устройствами ПР и ПМ, сочетающий в себе принципы систем с переменной структурой и непрямой адаптации. Настройка параметров блока изменения структуры (пространственного положения поверхности скольжения) в сравнении с традиционными системами позволяет значительно увеличить быстродействие и качество процессов управления в условиях неопределенности.
7. Построен алгоритм (адаптивный наблюдатель) для параметрической идентификации вязкого сопротивления. Разработанный и известные алгоритмы применены для параметрической идентификации конкретных подсистем реального подводного робота на основе экспериментальных данных.
8. Разработан и исследован новый перспективный класс робастно — адаптивных систем децентрализованного управления исполнительными устройствами ПР и ПМ, основанный на применении эталонного параметра скольжения. Адаптивная настройка блока изменения структуры, обеспечивающая близость текущего значения параметра скольжения к эталонной величине, позволяет значительно повысить качество и быстродействие систем управления ПР и I б условиях структурно — параметрической неопределенности. Синтезированные структуры робастно — адаптивного децентрализованного управления обладают свойствами субоптимальности. Показана эффективность и выполнен синтез систем рассматриваемого класса с нелинейной настраиваемой поверхностью скольжения.
Список литературы
- Автономные подводные аппараты / Агеев М. Д., Касаткин Б. А., Киселев Л. В. и др. Л.:Судостороение, 1981. — 224 с.
- Алексеев Ю.К., Аксенов В. П., Герман Д. А., Костенко В. В. Опыт разработки и эксплуатации системы управления подводного аппарата // Технические средства и методы изучения океанов и морей: Тез.докл. Всесоюзн. совещ., Геленджик. -М.: ИО АН СССР, 1985. -с.93.
- A.c. N 1 012 193 G 05 В 5/01 Следящая система / Дыда A.A., Михалев A.C. Опубл.15.04.83. Бюл. N 14.
- A.c. 1 218 798 СССР, МКИ4 G 05 В 11/01. Система управления с переменной структурой /A.A. Дыда, В. Ф. Филаретов. Опубл.18.07.84.
- A.c. 1 453 362 СССР, МКИ4 G 05 В 11/00 Самонастраивающийся электропривод /В, Ф, Филаретов, A.A. Дыда. Опубл. 23.01.89, Бюл. N 3.
- A.c. 1 496 999 СССР, МКИ4 В 25 У 13/00. Устройство для управления приводом манипулятора /A.A. Дыда, В. Ф. Филаретов. Опубл. 30.07.89, Бюл. N 28.
- А- с, 1 487 686 СССР, МКИ4 G 05 В 13/02. Система с переменнойструктурой /A.A. Дыда, В. Ф. Филаретов. Опубл. 7.12.87.
- A.c. СССР 1 547 559, МКИ4 G 05 В 13/03. Система с переменной структурой /A.A. Дыда, B.C. Очкал, В. Ф. Филаретов, Ф. Д. Юрчик./ Опубл.28.10.87
- A.c. СССР 1 553 376, Жй4 В 25 У 13/00. Устройство для управления электроприводом робота /A.A. Дыда, A.C. Очкал, В. Ф. Филаретов. Бюл.12, 1990.
- А. с. СССР N 1 614 682, МКИ4 G 05 В 13/02. Самонастраивающаяся система с переменной структурой /A.A. Дыда, В. Ф. Филаретов. Опубл. 15.08.90.
- А.с.СССР N 1 302 596 В 63 В 21/66 Подводный исследовательский комплекс / Дыда A.A., Титаев Б. Ф., Филаретов В. Ф., Юрчик Ф. Д. Опубл. 24.04.85.
- А.с.СССР N 1 390 962, В 63 В 21/66 Устройство для передачи энергии и сигналов к подводному аппарату / Дыда A.A., Титаев Б. Ф., Филаретов В. Ф., Юрчик Ф. Д. Опубл.20.12.85.
- А.с.СССР N 1 434 676, В 63 В 21/00 Способ управления подвижным аппаратом и устройство для его осуществления / Юрчик Ф. Д., Дыда A.A. Опубл. 23.12.86.
- А.с.СССР N 1 462 640 В 63 В 21/66 Подводный робот / Юрчик Ф. Д., Дыда A.A., Филаретов В. Ф. Опубл.27.0,2.87.
- А.с.СССР N 1 487 349, В 63 В 21/66 Подводнй исследовательский комплекс / Юрчик Ф. Д., Дыда A.A., Титаев Б. Ф., Филаретов В. Ф. Опубл. 17.12.87.
- А.с.СССР N 1 505 244, G 05 В 11/00 Самонастраивающийся электропривод / Дыда A.A., Суляев A.C. Опубл. 07.01.88.
- А.с.СССР N 1 526 444 Адаптивная система управления / G 05 В 13/02/ Дыда A.A. Опубл. 24.03.88.
- А.с.СССР N 1 571 548 Релейная адаптивная система / G 05 В 13/02 Дыда A.A. Опубл. 24.03.88, Вюл. М 22
- A.c. СССР N 1 584 612 Система с переменной структурой / МКИ^ G 05 В 13/02 / A.A. Дыда, В. Ф. Филаретов.
- А.с.СССР N 1 615 672 Нелинейная следящая система / G 05 В 11/00 Филаретов В. Ф., Васильев А. И., Дыда A.A./ Бюл. N47, 1990.
- Патент N 2 034 695, В 25 J 13/00. Система с переменной структурой / Дыда A.A., Васильев А. М., Филаретов В.Ф./Бюл.N 13, 1995.
- Патент N 2 051 543 Самонастраивающаяся система с перемнной структурой / Дыда A.A., Филаретов В. Ф. / Бюл. N 36, 1995.
- Айзерман М.А., Пятницкий Е. С. Основы теарии разрывных систем // Автоматика и телемеханика. 1974. — N.7,8.
- Андреев Ю.Н. Управление конечномерными линейными объектамию М: Наука, 1976, 424 с.
- Ащепков Л.Т. Оптимальное управление разрывными системами. -Новосибирск: Наука, 1987. 226 с.
- Варбашин Е.А. Введение в теорию устойчивости. Наука, 1967.
- Белянин П.Н. Робототехнические системы для машиностроения. -М.: Машиностроение, 1986. 256 с.
- Бойчук Л.М. Метод структурного синтеза нелинейных систем автоматического управления. М.: Энергия, 1971. — 112 с.
- Бесекерский В.А., Попов Е. П. Теория систем автоматического регулирования. М.: Наука, 1975. — 767 с.
- Бондарев А.Г., Бондарев O.A., Костылева Н. Е., Уткин В. И. Скользящие режимы в системах с асимптотическими наблюдателями состояний //Автоматика и телемеханика. 1985. — Мб. — С. 5−11.
- Борцов Ю.А., Юнгер И. Б. Автоматические системы с разрывным управлением. Л.: Энергоатомиздат, 1986. — 168 с.
- Борцов Ю.А., Поляхов Н. Д., Путов В.В.. Электромеханические системы с адаптивным и модальным управлением. Л.: Энергоатомиздат, 1984. — 215 с.
- Брайсон А., Хо Ю Ши. Прикладная теория оптимального управления. М.: Мир, 1972. — 244 с.
- Васильев А.И., Дыда A.A., Михалев A.C. Способ гармонической линеаризации сложных нелинейных корректирующих устройств / Изв. Вузов СССР, Приборостроение, 1979, т.22, N 10, с.24−27.
- Воеводин В.В., Кузнецов Ю. А. Матрицы и вычисления. М.# Наука, 1984. — 320 с.
- Вукобратович М., Стокич Д. Управление манипуляционными роботами. М.: Наука, 1985. — 384 с.
- Вукобратович М., Стокич Д., Кирчански Н. Неадаптивное и адаптивное управление манипуляционными роботами. М.# Мир, 1989. — 376 с.
- Динамика управления роботами /В.В. Козлов, В. П. Макарычев, A.B. Тимофеев и др- Под ред. Е. М. Юревича. М.: Наука, 1984. -334 с.
- Дистанционно управляемые роботы-манипуляторы /Под ред. Попова Е. П. и Игнатьева М. Е. М.# Мир, 1976. — 462 с.
- Дистанционно управляемые роботы и манипуляторы /B.C. Кулешов, H.A. Лакота, В. В. Андрюнин и др.- Под общ. ред. Е. П. Попова. -М.# Машиностроение, 1986. 328 с.
- Дмитриев А.Н. Проектирование подводных аппаратов. Л. .'Судостроение, 1978. 238 с.
- Догановский С.А. Параметрические системы автоматического регулирования. М.: Энергия, 1973. — 166 с.
- Дыда A.A. Разработка адаптивного алгоритма управления подводным аппаратом роботом // Тез.докл. 34 юбилейной научно-техн.конф.ДВГТУ. Кн. З, Владивосток, 1994, с. 13 — 15.
- Дыда A.A. Синтез и исследование систем переменной структуры с прямой адатацией для управления роботом // 5 Всесоюзное совещание по робототехническим системамю Тез.докл., часть 1, с. 225 -Геленджик, 1990.
- Дыда A.A. Устойчивость, качество и грубость автоматических систем с нелинейной коррекцией / Тез.докл. межвузовской конференции молодых ученых, Владивосток, 1985
- Дыда A.A. Синтез нелинейных регуляторов для системы управления многосвязным объектом //Тез. докл. Всесоюзного сов.-сем. Проблемы оптимизации и управления динамическими системами в машино- и приборостроении. М.:МИЭМ, 1987. — С. 48
- Дыда A.A. Идентификация объекта управления в системе с переменной структурой // Всесоюзная школа-семинар по диагностике электронных цепей и системю. Тез.докл. Владивосток, 1990, с.20
- Дыда A.A., Зубрицкий Д. А. Анализ чувствительности электромеханических следящих систем с нелинейной коррекцией / Тез.Всесоюзн.совещ. молодых ученых и специалистов «Проблемы теории чувствительности электронных и электромеханических систем1. Москва, 1987
- Дыда A.A., Лебедев A.B. Нелинейная адаптивная коррекция движителя подводного робота / Изв. ВУЗов, Электромеханика, N 1−2, 1996, с. 83 87.
- Дыда A.A., Михалев A.C., Матюхина Л. И. Частотный критерий устойчивости систем автоматического управления с псевдолинейными корректирующими устройствами / Изв. Вузов СССР, Приборостроение, 1984, т.27, N 7, с.20−24
- Дыда A.A., Позднякова С. Л. Автоматизированное проектированиесистем автоматического управления с нелинейной коррекцией / *
- Всесоюзн.семинар «Автоматизация проектирования в энергетике и электротехнике», Тез.докл., Челябинск, 1985
- Дыда A.A., Михалев A.C., Позднякова С. Л. Алгоритмы и программа автоматизированного синтеза нелинейных корректирующих устройств в электроприводах на основе показателя колебательности / Изв. Вузов СССР, Электромеханика, 1982, N 12, с.1422−1426.
- Дыда A.A., Очкал B.C. Синтез и исследование адаптивных систем с переменной структурой для управления приводом робота / Тез.докл. межвузовской конференции молодых ученых, Владивосток, 1985
- Дыда A.A., Очкал B.C., Юрчик Ф. Д. Разработка и исследование адаптивных электроприводов манипуляционного робота, функционирующего в вязкой среде / Тез. 4-го Всесоюзн.совещ. поробототехническим системам, Киев, 1987, ч.1, с.213−214
- Дыда A.A., Филаретов В. Ф. Синтез адаптивных систем с переменной структурой для управления электроприводами роботов //Тез. докл. 3 Всесоюзного сов. по робототехническим системам. Ч. 2. Воронеж, 1984. — С. 89−90.
- Дыда A.A., Филаретов В. Ф., Юрчик Ф. Д. Проектирование подводного рабочего комплекса //Тез. докл. Всесоюзной школы. Технические средства и. методы исследования Мирового океана. Т. 2. М., 1987. — С. 57.
- Дыда A.A., Очкал B.C., Филаретов В. Ф. Оптимальные по быстродействию системы с переменной структурой для управления электроприводами роботов //Оптимизация режимов работы систем электроприводов. Межвуз. сб. Красноярск, 1986. — С. 59−62.
- Дыда A.A., Филаретов В. Ф. Адаптивные системы с переменнойструктурой для управления электроприводом робота, //Изв. АН СССР. Техническая кибернетика. 1987. — N 1. — С. 219.Учетн.М 322−85 от 12.05.85.
- Дыда A.A., Очкал B.C., Филаретов . В. Ф. Параметрическая адаптация в системах с переменной структурой / Тез. докл. республ.конф. «Роботизация и ГСП», Черновцы, 1986
- Дыда A.A., Филаретов В. Ф. Самонастраивающаяся система с переменной структурой для управления электроприводами манипулятора //Изв. ВУЗов. Электромеханика. 1989. — N 2, — С. 102−106.
- Дыда A.A., Филаретов В. Ф. Синтез^ и исследование адаптивных систем управления манипуляционными механизмами / 34 Internationeies wissenschaftliches colloquium. Technische Hochschule Ilmenau, DDR, 1989.
- Дыда A.A., Филаретов В. Ф. Алгоритм квазиоптимального адаптивного управления приводами манипуляционных роботов / Оптимизация режимов работы систем электроприводов. Межвузовский сборник. Красноярск, 1992.
- Дыда A.A., Филаретов В. Ф. Устройство для управления приводом манипулятора / Информац. листок Приморского ЩТМ N 180−92, Владивосток, 1992, 2 с.
- Дыда A.A., Юрчик Ф. Д. Подводный исследовательский комплекс для освоения шельфа / Тез.докл. 1 Всесоюзной конференции «Шельф-86 Москва, 1986
- Дыда A.A., Юрчик Ф. Д. Проектирование подводного рабочего комплекса / Тез. Всесоюзн. школы «Технические средства и методы изучения океанов и морей 11, Геленджик, 1987
- Исследование и разработка системы управления подводного телеуправляемого робототехнического комплекса / Отчет по НИР., Гос. per. N 81 044 240. МАИ, 1982.- 90 с.
- Исследование и разработка системы управления подводных аппаратов с манипуляторами / Отчет по НИР, Гос. per N 78 066 587. -МАИ, 1977.- 105 с.
- Каспржак Г. М., Уткин В. И., Грехов В. П. Принципы построения и исследование маломощных приводов постоянного тока с релейным управлением в скользящем режиме //Изв. ВУЗов. Электромеханика. -1982. N 12. — С. 1452−1458.
- Катковник В.Я., Кульчицкий О. Ю., Хейсин В. Е. Адаптивноеуправление существенно нестационарными статическими и динамическими объектами //Вопросы кибернетики. Проблемы теории и практики адаптивного управления. М., 1985. — С-. 60−70.
- Константинов С.Д., Леонтьев O.A., Попов 0.0. Управление движением подводного аппарата по параметрам среды / Технические средства изучения Мирового океана. М.:Изд.Ин-та океанологии АН СССР, 1983, с. 48 52.
- Костенко В.В. Движительный комплекс аппарата глубоководного погружения // Технические средства изучения и освоения океана: Тез. докл. 5-й Всесоюзн. конф. «Океанотехника».- Л., 1985.-Вып.1. -с.86.
- Красовский H.H. Теория управления движением. М.# Наука, 1968. — 476 с.
- Крутько П.Д., Лакота H.A. Синтез алгоритмов управления движением роботов по методу обратных задач динамики. Координатная форма задания траекторий //Изв. АН СССР. Техн. кибернетика. -1982. N 1. — С. 154−159.
- Крутько П.Д. Обратные задачи динамики управляемых систем. -М.: Наука, 1987. 304 с.
- Крутько П.Д., Лакота H.A. Метод обратных задач динамики в теории конструирования алгоритмов .управления манипуляционных роботов. Задача стабилизации //Изв. АН СССР. Техническая кибернетика. 1987. — N 3. — С. 82−91.
- Крутько П.Д. Алгоритмы адаптивного управления исполнительнымисистемами манипуляторов //Изв. АН СССР. Техническая кибернетика.- 1988. N 4. — С. 3−13.
- Кулешов B.C., Лакота H.A. Динамика систем управления манипуляторами. М.: Энергия, 1971. — 304. с.
- Лурье А.И. Аналитическая механика. М: Физматгиз, 1961. -824 с.
- Лукомский В.А., Чугунов B.C. Системы управления морскими подвижными объектами. Л., Судостроение, 1988. — 272 с.
- Математическая теория оптимальных процессов /Л.С. Понтрягин, В. Г. Болтянский, Р. В. Гамкрелидзе, Е. Ф. Мищенко. -М.: Наука, 1969, — 384 с.
- Медведев B.C., Лесков А. Г., Ющенко A.C. Системы управления манипуляционных роботов. М.: Наука, 1978. — 416 с.
- Метод функций Ляпунова в задачах синтеза управления пространственным движением самолета. М., 1992 (Препринт / Институт проблем управления). — 75 с.
- Милн П. Подводные инженерные исследования. Л.: Судостроение, 1984. — 339 с.
- Михалев A.C., Миловзоров В. П. Следящие системы с бесконтактными двигателями постоянного тока. М.: Энергия, 1979. -160 с.
- Необитаемые подводные аппараты / Под ред. А. В. Сытина. М.: Воениздат, 1975. — 158 с.
- Очкал B.C. Разработка и исследование систем с переменнойструктурой для управления электроприводами роботов / Дисс.канд.техн.наук. Владивосток, 1990.- 155 с.
- Павлов A.A. Синтез релейных систем, оптимальных по быстродействию. М.: Наука, — 1967. 390 с.
- Пантов E.H., Махин H.H., Шереметов Б. Б. Основы теории движения подводных аппаратов. Л., Судостроение, 1973. — 211 с.
- Петров Б.Н., Рутковский В. Ю., Земляков С. Д. Адаптивное координатно-параметрическое управление нестационарными объектами. М.: Наука, 1980. — 244 с.
- Подводные работы /В.С.Ястребов, М. Б. Игнатьев, Ф. М. Кулаков и др. Под общ.ред. В. С. Ястребова. — Л.:Судостроение, 1977. — 368 с.
- Пол Р. Моделирование, планирование траекторий и. управление движением робота-манипулятора. М.: Наука, 1976. — 104 с.
- Понырко С.А., Попов О. С., Ястребов B.C. Адаптивные системы для исследования океана. С.- Петербург, Судостроение, 1993. -224 с.
- Попов В.М. Гйперустойчивость автоматических системю М.: Наук, 1970.
- Попов Е.П., Верещагин А. Ф., Зенкевич С. Л. Манипуляционные роботы. Динамика и алгоритмы. М.: Наука, 1978. — 400 с.
- Принципы построения и проектирования самонастраивающихся систем управления /Б.Н.Петров, В. Ю. Рутковский, И. Н. Крутова. М.: Машиностроение, 1972. — 260 с
- Путов B.B. Методы построения систем управления нелинейными нестационарными динамическими объектами с функционально параметрической неопределеннностью / Дисс. докт.техн.наук. -Санкт-Петербург, 1993. 586 с.
- Пятницкий Е.С. Синтез управления манипуляционными роботами на принципе декомпозиции //Изв. АН СССР. Техническая кибернетика. 1987. — N 3. — С. 92−99.
- Справочник по теории корабля: В трех томах. Том 1. Гидромеханика. Сопротивление движению судов. Судовые движители. / Под ред. Я. И. Войткунского. Л.: Судостроение, 1985. — 768 с.
- Телешов Н.С. Динамика манипулятора, работающего в жидкой среде. В кн. Робототехника. — Л.:ЛПИ, 1976, с.38−44.
- Теория систем с переменной структурой /С.В.Емельянов, В. И. Уткин, В. А. Таран и др.- Под ред. С. В. Емельянова. М.: Наука, 1970. — 592 с.
- Тимофеев A.B. Управление роботами. Л.: Издательство Ленинградского университета, 1986. — 240 с.
- Тимофеев A.B. Адаптивные робототехнические системы. Л.# Машиностроение, 1988. — 332 с.
- Тимофеев A.B. Адаптивное управление роботами //Изв. АН СССР. Техническая кибернетика. 1989. — N 1. — С. 154−165.
- Уткин В.И. Скользящие режимы и их применение в системах с переменной структурой. М.: Наука, 1974. — 272 с.
- Уткин В.И. Скользящие режимы в задачах оптимизации иуправления. M.: Наука, 1981. — 368 о.
- Уткин В.И. Системы с переменной структурой: состояние, проблемы и перспективы //Автоматика и телемеханика. 1983- - N 9. — С. 5−26.
- Филаретов В.Ф. Динамика манипуляторов с самонастраивающимися системами управления / Дисс.докт.техн.наук. Владивосток, 1990. — 526 с.
- Фомин В.Н., Фрадков А. Л., Якубович В. А., Адаптивное управление динамическими объектами. М.: Наука, 1981. — 448 с.
- Фрадков А.Л. Адаптивное управление в сложных системах: беспоисковые методы. М., Наука. Гл.ред.физ.-мат.лит., 1990.296 с.
- Фурман Ф.В., Пашкевич А. П., Кукареко Е. П. Квазиоптимальное по быстродействию адаптивное управление электроприводами роботов-манипуляторов //Изв. ВУЗов. СССР. Приборостроение. -1987. N 11. — С. 15−20.
- Цыпкин Я.З. Адаптация и обучение в автоматических системах. М.: Наука, 1968. — 399 с.
- Чураков Е.П. Оптимальные и адаптивные системы. М.:
- Энергоатомиздат, 1987. 256 с.
- Юревич Е.И. и др. Управление роботами от ЭВМ. /Е.И.Юревич, С. И. Новаченко, В. А. Павлов и др. Л.: Энергия, 1980. — 264 с.
- Ястребов B.C. Телеуправляемые подводные аппараты. Л.# Судостроение, 1973. — 200 с.
- Ястребов B.C., Филатов A.M. Системы управления подводных аппаратов роботов. М., Наука, 1983. 88 с.
- Abdallah., С., Dawson, D., Dorato, P., Jamshidi, M. Survey of Robust Control for Rigid Robots // IEEE Control Systems, Pebr.1991, pp.24−29.
- Abkovitz, M.A. Stability and Motion Control of Ocean Vehicles.- Cambridge, MA: M.I.T. Press, 1969.
- Alexeev U.K., Kostenko V.Y., Pilaretov V.P. Underwater robotics technology in Ocean inspection and maintenance of sea bottom installations // Proc. of «Ocean. cities 95 «Conf.-Monaco, 1995, pp.29−32.
- Alexeev U.K., German D.A., Kostenko Y.V., Shumsky A.E. Use of identification and fault diagnostics methods for underwater robotics // Proc. of «Ooean-94» Conf, Brest, Prance, pp.132−136.
- Astrom, K.J., Wittenmark, B. Adaptive Control. Boston: Adisson — Wesley, 1989.
- Campion, В., Bastin, G. Indirect adaptive state feedback control of lenearly parametrized nonlinear systems, Int.J. of Adaptive Control and Signal Processing, Vol.4, pp.354 358,
- Choi, S.B., Cheong, C.C., Park, D.W. Moving Switching Surfaces for Robust Control of Second Order Variable structure Systems // Int.J.Control, 1993, Vol.58, No.1f pp.229−245.
- Craig J.J., Hsu, P., Sastry, S.S. Adaptive control of machanical manipulators. The Int.J. Robotic Research, Vol.6, pp.16−28, 1987.
- Cristi, R., Papoulias, P.A., Healey, A.J. Adaptive Sliding Mode Control of Autonomous Underwater Vehicles in the Dive Plane // IEEE of Oceanic Engineering, Vol.15, No.3, July 1990, pp.152−160.
- Dawson., D., Qu, Z., Duffie, J. Robust Tracking Control for Robot Manipulators // Robotica, 1993, Vol.11, pp.201−208.
- Dubowsky, S., Papadopuolos, E. The Kinematics, Dynamics, and Control of Pres-Ilying and Pree-Ploating Space Robotic Systems // IEEE Trans, on Robotics and Automation, Vol.9, No.5, pp.531 -543, 1993.
- Dwyer, T, A, W., Sira-Ramires, H., Monaco, S.,. Stornelli, S. Variable Structure Contol of Globally Feedback Decoupled Deformable Vehicle Maneuvers.- Proc. of 27-th CDC, pp.1281 -1287, 1987.
- Dyda, A.A. (1994) Design of Adaptive VSS Algorithm for Robot Manipulator Control. Proc. of Pirst Asia Control Conference, Tokyo, July 27 -30, 1994, pp.1077 -1080.
- Знергоатомиздат, 1987. 256 с.
- Юревич Е.И. и др. Управление роботами от ЭВМ. /Е.И.Юревич, С. И. Новаченко, В. А. Павлов и др. Л.: Энергия, 1980. — 264 о.
- Ястребов B.C. Телеуправляемые подводные аппараты. Л.# Судостроение, 1973. — 200 с.
- Ястребов B.C., Филатов A.M. Системы управления подводных аппаратов роботов. М., Наука, 1983. 88 с.
- Abdallah, С., Dawson, D., Dorato, P., Jamshidi, M. Survey of Robust Control for Rigid Robots // IEEE Control Systems, Pebr.1991, pp.24−29.
- Abkovitz, M.A. Stability and lotion Control of Ocean Vehicles.- Cambridge, MA: M.I.T. Press, 1969.
- Alexeev U.K., Kostenko V.V., Pilaretov V.I. Underwater robotics technology in Ocean inspection and maintenance of sea bottom installations // Proc. of «Ocean. cities 95 и Conf.-Monaco, 1995, pp.29−32.
- Alexeev U.K., German D.A., Kostenko V.V., Shumsky A.E. Use of identification and fault diagnostics methods for underwater robotics // Proc. of «Ooean-94» Oonf, Brest, Prance, pp.132−136.
- Astrom, K.J., Wittenmark, B. Adaptive Control. Boston: Adisson — Wesley, 1989.
- Campion, В., Bastin, G. Indirect adaptive state feedback control of lenearly parametrized nonlinear systems, Int.J. of Adaptive Control and Signal Processing, Vol.4, pp.354 358,
- Dyda, A.A. (1994) Design of Adaptive Control Algoritiims for Underwater Manipulator Drives Proc. of Intern. Conf. OCEANS 94 OSiTES, September 13 — 16, Brest, France.
- Dyda, A.A. and S. Di Gennaro (1994), Adaptive trajectory oontrol for underwater robot. Proo. of Intern. Conf. OCEANS 94 OSATES, September 13 — 16, Brest, France.
- Dyda, A.A., Lebedev, A.Y.and Y.F.Filaretov Simple adaptive YSS control for underwater robots // Proc. of Mechatronics* 96 and M2YIP'96, September 18 20, 1996, Guimaraes, Portugal .
- Dyda, A.A. and Y.F.Filaretov Adaptive variable structure systems for manipulator control // Fifth Intern. Conf. on Artificial Intelligence and Information Control. Systems of Robots. — Strbsko Pleso, Oseohoslovakia, 1989.
- Dyda, A.A.and Y.F.Filaretov (1993) «Algorithm o. f Time-Sub-Optimal Control for Robot Manipulator Drives «Preprints of 12th World IFAC Congress, Sydney, iustralia, July 1993, vol.4, pp.97−99.
- Dyda, i.i.and Y.F.Filaretov (1995) Synthesis of idaptive Variable Structure Systems for Sliding Regimes of Robot Actuators. Proc. of 4th IEEE Conference on Control Applications, New York, September 28 — 29, 1995.
- Dyda, A.A.and Y.F.Filaretov (1995) Synthesis of idaptive Variable Structure Systems for Manipulator Servoaotuators.
- Proc. of Third IMC Symposium on Nonlinear Control Systems Design, Tahoe City, California, June 25 -28, Vol.2, 1995, pp.735−740.
- Dyda, i.A.and V.P.Pilaretov (1994) Synthesis of Adaptive Variable Structure Systems for Eleotrioal Robot Aotuators. -Proc. of IPAC Symposium on Robust Control Systems Design, Rio De Janeiro, Sept.14−16, Brasil, 1994.
- Dyda, A.A., V.P.Pilaretov and Vuoobratovio, M. Sliding Regimes in Adaptive Robot Control Proo. of European Control Conference, Rome, Italy, 1995, pp.2363−2367.
- S.Di Gennaro and Dyda, A.A. (1993) Attitude control of a satellite with damping compensation of the flexible beam // Proc. of European Control Conference, Nietherland, Groningem, July 1993
- Parrel, J., Glauberg, B. Issues in the Implementation of an Indirect Adaptive Control System // IEEE of Oceanic Engineering, Vol.18, No.3, July 1993, pp.311−318.
- Pilaretov, V.P., Dyda, A.A. Quasi Optimal Adaptive Control Systems for Electric Servoactuators of Manipulation Robots -Proc. of Pirst Asia Control Conference, Tokyo, July 27 -30, 1994, pp.275 — 277.
- Pilaretov, V.P., Dyda, A.A. and Lebedev, A.V. (1995) The Sliding Mode Adaptive Control System for Autonomous Underwater Robot. Proc. of 7th International Conference on Advanced Robotics, Sant Peliu de Guixol, Spain, Sept.20 -22, Vol.1, 1995, pp.263−266.
- Pilaretov, V.f., Dyda, A.A. and Lebedev, A.V. (1995) The Sliding Mode Adaptive Control System for Autonomous Underwater Robot. Proc. of 4th International Conferenoe on Intelligent Autonomous Systems, Karsruhe, Germany, March 1995.
- Possen, T.I., Sagatun. S. Adaptive control of nonlinear systems: A case study of underwater robotic systems, J. Robotic Systems, vol.8, pp.393 412, 1991.
- Priedland, B., Park, Y.J. On Adaptive Priction Compensation // IEEE on Automatic Control, Vol.37, No.10, Oct.1992, pp.1609 -1612.
- Goheen, K.R. Modelling Methods for Underwater Robotic Vehicle Dynamics // Journal of Robotic Systems, Vol.8, No.3, pp.295 317, 1991.
- Goheen, K.R., Jefferys, E.R., Broome, D.R. Robust self-designing controllers for underwater vehicles // J. Offshore Mech.Arctic Eng., Vol.109, pp170 178, 1987.
- Goheen, K.R., Jefferys, E.R. Multivariable Self-Tuning Autopilots for Autonomous and Remotedly Operated Underwater
- Vehicles // IEEE oi Ooeanio Engineering, Vol.15, No.3, July 1990, pp.144−151.
- Humphfies, Dynamics and hydrodinamics of ooean vehicles // IEEE Oceans'81 Conf. Proc., Vol.1, pp.88−91, 1981.
- Healey, A.J., Lienard, D. Multivariable Sliding Mode Oonrtol for Autonomous Diving and Steering of Unmanned Underwater Vehicles // IEEE Journal of Oceanic Engineering, vol.18, No.3, July 1993, pp.327 — 339.
- Ioi, K., Itoh, K. Modelling and Simulation of an Underwater Manipulators // Advanced Robotics, Vol., No.4, pp.303−317, 1990.
- Isidori, A. Nonlinear Control Systems: an Introduction, Springer Verlag, 1989.
- Landau, Y.D. Adaptive Control: The Model Reference Approach. Marcel Dekker, New — York, 1979.
- Lewis, D.J., Lipscombe, J.M., Thomasson, P.G. The simulation of remotely operated underwater vehicles // Proc. ROY'84, MTS, 1984.
- Lim, C.M., Hiyama, T. Application of fuzzy logic control to a manipulator, IEEE Trans, on Robotics & Automation, vol.7, No.5, Oct.1991,"pp.688 691.
- Mahesh, H., Yuh, J., Kakshmi, R. Coordinated Control of Underwater Vehicle and Robotic Manipulator // Journal of Robotic Systems, Vol.8, No.3, pp.339 370, 1991.
- Morgan R.G., Ozguner U. A decentralized variable structurecontrol algorithm for robot manipulators // IEEE J. Rob. and Autom. 1985. — V. 1. — N 1. P. 57−65.
- Nakamura, Y., Savant, S. Nonlinear Tracking Control of Autonomous Underwater Vehicles // Proc. of the IEEE Int.Conf. on Robotics and Automation, pp. A4-A9, Nice, Prance, 1992.
- Narendra, K.S., Parthasarathy, K. Identification and Contol of Dinamical Systems using Neural Networks // IEEE Trans. Neural Networks, No.1, 1990, pp.4−27.
- Negahdaripour, S., Yu, C.H., Shokrollahi, A.H. Recovering Shape and Motion from Undersea Images II IEEE of Oceanic Engineering, Yol.15, No.3, 1990, pp.189−198.
- Nomoto, M., Hattori, H. A deep ROY Dolphin 3K: Design and performance analysis. IEEE J. of Oceanic Engineering, Yol.11, No.3, 1986, pp.373−391.
- Ortega, R., Spong, M.W. Adaptive Motion Control of Rigid Robots: A Tutorial 11 II Proc. of IEEE Conf. Decision and Control, 1988, pp.1575−1584
- Singh, S.N. Nonlinear adaptive attitude control of spacecraft, IEEE Trans. AES-23, pp.371−379, 1987.
- Singh, S.N. Robust nonlinear attitude control of flexible spacecraft, IEEE Trans. AES-23, pp.380−387, 1987.
- Slotine J.E. The robust control of robot manipulators //Int. J. Robotic Research. 1985. — V. 4. — N 2. — P. 49−64.
- Spong, M.W. On the Robust Control of Robot Manipulators // IEEE Trans, on Automatic Control, Vol.37, No.11, 1992. pp.1782−1786.
- Stepanenko, Y., Su, C.Y. Variable Structure Control of Robot Manipilators with Nonlinear Sliding Manifolds // Int.J.Control, 1993, Vol.58, No.2, pp.285−300.
- Stepanenko, Y., Jing Yuan. Robust Adaptive Control of a Class of Nonlinear Mechanical Systems with Unbounded and Past-varying Uncertainties // Automatics, Vol.28, No.2, pp.265−276.
- Su, C. Y, Leung, T.P. A Sliding Mode Controller with Bound Estimation for Robot Manipulators // IEEE Trans, on Robotics and Automation, Vol.9, No.2, 1993, — pp.208−214
- Tarn, T.J., Be^'czy, A.K., Yun, X., Li, Z. Effect of Motor Dynamics on Nonlinear Peedback Robot Arm Control // IEEE Trans, on Robotics and Automation, Vol.7, No.1, pp.114−121.
- Tarn, T.J., Shoultz, G.A., Yang, S. Dynamical model for free floating underwater robotic vehicle with an n-axis manipulator // Proc. of the US — Portugal Joint Workshop on Underwaterrobotic and Intelligent Control, March 2−3, 1995, Lisbon, Portugal.
- Tarn, T.J. Adaptive Control of Underwater Robotic Vehicle / in «Systems, models, and feedback: theory and application». -Birkhause, 1992.
- Tadfflor, G. Worst case design in time domain, Math. Control Systems, 3: 301 324, 1990.
- Teel, A., Kadiyala, R., Kokotovic, P.V., Sastry, S.S. Indirect techniques for adaptive input output linearization of non-linear systems, Int.J. of Control, Vol.53, pp.193 -222, 1991.
- Triantafyllou, M.S., Grosenbaugh, M.A. Robust control for underwater vehicle systems with time delays // IEEE Journal of Oceanic Engineering, vol.16, No.1, Jan. 1991, pp.146 — 151.
- UNderwater Intelligent Operation and Navigation UNION // Proc. of the US Portugal Joint Workshop on Underwater robotic and Intelligent Control, March 2−3, 1995, Lisbon, Portugal.
- Vucobratovic, M., Kircansky, N. Scientific Fundamentals of Robotics. Vol.1−3, Springer Verlag, 1982 — 1985.
- Vucobratovic, M., Stokie, D. Suboptimal Synthesis of Robust Decentralized Control for Large Scale Mechanical Systems // Automatioa, Vol.20, No.6, pp.803 — 807, 1987.
- Wakileh, B.A.M., Gill, K.P. Use of fuzzy logic in robotics, Computers in Industry, vol.10, pp.35 46, 1988.
- Yoerger, D.R., Cooke, J.G., Slotine, J.E. The influence ofthrustep dynamics on underwater vehicle behavior and their incorporation into control system design // IEEE Journal of Oceanic Engineering, vol.15, No.3, July 1990, pp.167 — 177.
- Yoerger, D.R., Slotine, J.E. Robust Trajectory Control of Underwater Vehicles // IEEE Journal of Oceanic Engineering, vol.0E-10, No.4, Oct.1985, pp.462 — 470.
- Yoo, D.S., Chung, M.J. A Variable Structure Control with Simple Adaptation Lows for Upper Bounds on the Norm of the Uncertainties // IEEE Trans, on Automatic Control, Vol.37, No.6, June 1992, pp.860−864.
- Yuh, J. Modelling and control of underwater robotic vehicles // IEEE Trans. Sys., Man, and Cybern., Vol.20, pp.1475 1482, 1990.
- Yuh, J., Gonugunta, K.V. Learning Control of Underwater Robotic Vehicles // IEEE Journal of Oceanic Engineering, vol.18, No.3., 1993, pp.106 — 111.
- Yuh, J., Lakshmi, R. An intelligent control system remotely operated vehicles // IEEE Journal of Oceanic Engineering, vol.18, No.1, Jan. 1993, pp.55 — 62. .
- Yuh, J., A neural net controller for underwater robotic vehicles, // IEEE Journal of OceanicEngineering, vol.15, No.3, July 1990, pp.161 166.