Эволюция классифицирующего автомата
Где |X| — длина вектора X, а |I| — длина его «информативной части». Речь идет о том, что требуемые для решения задачи датчики (их номера в векторе) могут занимать далеко не первые позиции, могут быть разгруппированы и т. д. Этот процесс повторяется с некоторой периодичностью и, по мере накопления опыта и расширения номенклатуры входных сигналов, предполагается, что робот начинает вести себя все… Читать ещё >
Эволюция классифицирующего автомата (реферат, курсовая, диплом, контрольная)
Сигналы среды, воспринимаемые рецепторами робота, поступают на вход классификатора. Одновременно с этим они образуют базу данных, на основе которой формируется множество обучающих примеров E.
Обучающие примеры — это множество пар вида.
E={ei}={(Xi, yi)},.
где Xi — двоичный вектор сигналов рецепторов, yi — требуемая для данной ситуации реакция.
В случае В-обучения требуемой реакцией может служить номер класса ситуации или, в случае изоморфизма «класс-действие» — номер действия.
В случае Б-обучения ситуация несколько усложняется. Входной вектор X должен состоять из двух частей — части, содержащей сигналы рецепторов, и части, описывающей внутреннее состояние системы — состояния эффекторов. Тогда требуемая реакция y может трактоваться «двоичным» образом, т. е. хороша или плоха данная комбинация эффекторов при заданном векторе рецепторов.

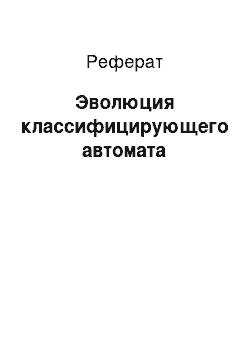
Рис. 8. Схема включения эволюционного процесса
Полученное множество обучающих примеров формирует среду, в которой запускается эволюционный процесс. Эволюции подлежат автоматы, задачей которых является классификация обучающей выборки. Далее из полученной в результате эволюции популяции автоматов {Ai} выбирается наиболее эффективная особь Aопт. Именно этот автомат загружается в робота в качестве классификатора.
Этот процесс повторяется с некоторой периодичностью и, по мере накопления опыта и расширения номенклатуры входных сигналов, предполагается, что робот начинает вести себя все более осмысленно.
При последовательной подаче элементов вектора X очевидно, что для безошибочного распознавания количество состояний автомата |Q| должно удовлетворять следующему требованию:
|Q|? |X| - |I|,.
где |X| - длина вектора X, а |I| - длина его «информативной части». Речь идет о том, что требуемые для решения задачи датчики (их номера в векторе) могут занимать далеко не первые позиции, могут быть разгруппированы и т. д.

Рис. 9. Структура вектора датчиков
В этом случае начало информативной части соответствует номеру первого необходимого для решения задачи датчика.
Важной особенностью эволюционного процесса являются ограничения, накладываемые на структуру особей. Это связано в первую очередь с ограниченностью вычислительных ресурсов робота. В проведенных экспериментах максимальная глубина памяти автоматов ограничивалась 10 состояниями. Очевидно, что для работы с вектором из 20-ти сигналов этого явно недостаточно. Однако в результате эволюции был получен автомат, успешно справляющийся с задачей управления. Происходило это за счет использования стохастичности. Например, для такого действия, как плавный (по контуру линии) поворот, использовались почти равные вероятности движения вперед и разворота влево (вправо). Это полученное решение было достаточно неожиданным для экспериментаторов.