Дельта-метод.
Динамика машин.
Колебания
Итак, мы располагаем значениями х, г/, и ф, = ф0+ Дф, с помощью которых находим новое значение Д, после чего изложенное построение повторяется. Аналогичным образом строится вся фазовая траектория. Поскольку каждый следующий шаг основан на информации, полученной на предыдущем шаге, дельта-метод при большом числе шагов дает значительную накопленную погрешность. Поэтому данный метод целесообразно… Читать ещё >
Дельта-метод. Динамика машин. Колебания (реферат, курсовая, диплом, контрольная)
Представим нелинейное дифференциальное уравнение второго порядка 
в следующем виде:  где
где 
Параметр &02 удобно выбрать таким образом, чтобы при малых колебаниях 3f/dq—*k?. Так, например, в дифференциальном уравнении (8.1) при 9 = q, /,(<�у) =gsin<7/L, Э/, /dq = gcosq/L. При 0 имеем cos 0, следовательно, kf)2 = g/L. Другими словами, мы выделяем в нелинейной восстанавливающей силе линейную составляющую.
Введем в рассмотрение «безразмерное время» <�р = kQt. Очевидно, что.

Здесь штрихом обозначена производная по безразмерному времени ср. Аналогичным образом получаем q = k^q", после чего уравнение (8.3) приводится к виду где 

Построим фазовую траекторию, отвечающую уравнению (8.4) (см. параграф 5.13), принимая q = .г, q = у. Для этого предварительно представим q' как.

после чего уравнение (8.4) представим в виде.

Если на малом отрезке безразмерного времени Дф считать функцию Д постоянной, то уравнение (8.5) может быть проинтегрировано в общем виде:

где R2 — некоторая константа.
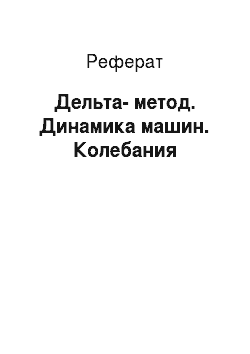
Уравнение (8.6) описывает на фазовой плоскости окружность радиуса R с центром, смещенным по оси хна величину А. Для построения фазовой траектории зададимся начальными условиями q0, q0, определяющими на фазовой плоскости точку М0 с координатами х0= q0 и у0 = q0/k0 (рис. 8.2, а).
При этом начальное положение центра окружности определяется как Л0(х0, у0, (р0 = 0). Проведем из этого центра небольшую дугу радиусом R{ (обычно угол Дф выбирается равным 10°- 15°). При этом определяется точка М, с координатами xv yv Чтобы найти безразмерное время Дф, соответствующее этой точке, запишем очевидное равенство г/, Дф, = Дг, где у, = 0,5 (у0 + г/,) — средняя безразмерная скорость на данном участке; Дг, = х] — х0. Легко убедиться в том, что Дф, «Ах{/у{ совпадает с углом (в радианах), отвечающим дуге MQMV

Рис. 8.2.
Итак, мы располагаем значениями х, г/, и ф, = ф0+ Дф, с помощью которых находим новое значение Д, после чего изложенное построение повторяется. Аналогичным образом строится вся фазовая траектория. Поскольку каждый следующий шаг основан на информации, полученной на предыдущем шаге, дельта-метод при большом числе шагов дает значительную накопленную погрешность. Поэтому данный метод целесообразно использовать для оценки поведения нелинейных систем на ограниченных отрезках времени, отвечающих переходным режимам (раскачка, затухание).
В качестве примера построим фазовую траекторию, соответствующую затухающим колебаниям при постоянной силе трения Р = -|Р| sign q (см. параграф 4.3). После приведенных выше элементарных преобразований уравнения (4.17), (4.18) принимают вид.

где Д. = |р|/с, с — коэффициент жесткости.
Таким образом, в верхней полуплоскости фазовая траектория представляет собой окружность с центром лгц = -Л, а в нижней — с центром xti = Д. (рис. 8.2, б). После того, как фазовая траектория пересекает окружность радиуса Д" движение прекращается.