Разработка моделей и исследование динамики микромеханических устройств с электростатическим накатом упругих лент
На рис. 7 приведена схематическая иллюстрация работы торсионного электростатического двигателя с гофрированной нанооболочкой — пружиной: а — схематичное изображение исходной структуры с гофрированной нанооболочкой — пружиной, расположенной в зазоре между пластинамисхематическое изображение двигателя с подвижной верхней пластинойв — вращение верхней пластины в результате изменения формы правой… Читать ещё >
Содержание
- ГЛАВА 1. РАЗРАБОТКА ЭЛЕКТРОМЕХАНИЧЕСКОЙ МОДЕЛИ РЕВЕРСИВНОГО МИКРОДВИГАТЕЛЯ ВРАЩЕНИЯ
- 1. 1. Конструктивные схемы и принцип действия реверсивного электростатического микродвигателя
- 1. 2. Постановка задачи
- 1. 3. Расчет электростатического давления
- 1. 4. Напряженно-деформированное состояние ленты при действии электростатического давления
- 1. 5. Напряженно- деформированное состояние ленты при отсутствии электростатического давления
- ГЛАВА 2. АНАЛИЗ РАЗЛИЧНЫХ РЕЖИМОВ ДВИЖЕНИЯ МИКРОДВИГАТЕЛЯ
- 2. 1. Шаговый режим движения микроактюатора
- 2. 2. Разгон и квазиустановившийся режим движения микроактюатора
- 2. 3. Экспериментальная оценка результатов численного моделирования динамики микроактюатора
- 2. 4. Характеристики электростатического микродвигателя вращения
- ГЛАВА 3. ДИНАМИКА СЕНСОРНОГО УСТРОЙСТВА МАЯТНИКОВОГО ТИПА С ЭЛЕКТРОСТАТИЧЕСКИМ НАКАТОМ
- 3. 1. Конструктивная схема и динамическая модель микромеханического сенсорного устройства
- 3. 2. Схема организации измерений уровней силового и кинематического возмущений
- 3. 3. Определение допустимых областей основных параметров сенсорного устройства
- 3. 4. Линейная модель сенсорного устройства
Разработка моделей и исследование динамики микромеханических устройств с электростатическим накатом упругих лент (реферат, курсовая, диплом, контрольная)
Благодаря развитию технологий микроэлектроники и микроэлектромеханических систем (МЭМС) за последнее время в мире создано большое число новых миниатюрных датчиков, микродвигателей и преобразователей, сочетающие характеристики электронных схем и механических компонентов [18], [69]. Применение миниатюрных датчиков инерциальной и внешней информации, микрогенераторов энергии, микроклапанов, микродвигателей и позиционирующих устройств позволяет решить задачи безопасности жизнедеятельности, энергосбережения и управления движением.
Анализ приоритетных направлений развития науки, технологий и техники и перечня критических технологий Российской Федерации к которым относятся индустрия наносистем, информационно-телекоммуникационные системы, энергоэффективность, энергосбережение показывает, что задачи создания новых перспективных приборов и устройств с повышенным сроком службы, низкой материалоемкостью и весом конструкции являются актуальными.
Основные задачи, которые ставятся перед разработчиками — микроэлектромеханических устройств, являются повышение точности, надежности и энергоэффективности проектируемых систем за счет применения новых конструкционных материалов, создания и совершенствования технологий изготовления, использования методов математического моделирования, позволяющими получить требуемые характеристики системы.
Объектами исследования являются новые научные задачи, связанные с разработкой новых перспективных устройств: реверсивный микродвигатель вращения и сенсорное устройство, принцип действия которых основан на электромеханическом преобразовании энергии — электростатическом накате проводящей гибкой металлической ленты на сегнетоэлектрическую пленку.
Целью работы является разработка динамических моделей новых микроэлектромеханических систем и их элементов в составе реверсивного микродвигателя вращения и сенсорного устройства, основанных на электростатическом накате подвижных гибких лент.
Для достижения поставленной цели необходимо решить следующие основные задачи:
— разработать электромеханические модели реверсивного микродвигателя вращения и сенсорного устройства, основанных на новом электромеханическом преобразовании энергии — накате металлической ленты на поверхность сегнетоэлектрической пленки;
— провести анализ различных режимов движения микродвигателя и сенсорного устройства;
— разработать программное обеспечение для аналитического и численного анализа различных режимов движения нелинейных сингулярно возмущенных устройств;
— определить параметры системы для требуемых режимов работы устройств.
Цели диссертации соответствуют Приоритетным направлениям развития науки, технологий и техники Российской Федерации по направлению «Транспортные и космические системы», приоритетному направлению модернизации и технологического развития экономики России: «Космические технологии, связанные с телекоммуникациями, включая и ГЛОНАСС, и программу развития наземной инфраструктуры», работа направлена на развитие технологий, входящих в перечень критических технологий Российской Федерации по направлению «Технологии мехатроники и создания микросистемной техники».
Методы исследования определялись спецификой изучаемых объектов и их математических моделей. В работе были использованы методы классической механики, асимптотические методы нелинейной механики, теория дифференциальных уравнений, методы математического моделирования и аналитических вычислений.
Достоверность полученных результатов обеспечивается корректным применением методов теоретической механики, механики деформируемых тел и асимптотическими методами теории дифференциальных уравнений, содержащих малый параметр, а также сопоставлением полученных результатов с экспериментальными данными и результатами, полученными другими исследователями.
Научная новизна результатов, полученных в диссертационной работе, заключается в следующем:
• получены новые механико-математические модели реверсивного электростатического микродвигателя вращения и сенсорного устройства с электростатическим накатом упругих лент на поверхность сегнетоэлектриче-ской пленки;
• разработана методика расчета электростатического давления, действующего на гибкую ленту, для неоднородного электростатического поля;
• установлено влияние закрепления ленты с подвижным элементом на характер изменения исследуемых параметров систем;
• установлено влияние упруго-массовых параметров ленты на период восстановления ее первоначальной формы и динамику микроактюатора в процессе разгона и квазиустановившегося режима;
• определены допустимые области основных параметров сенсорного устройства;
• установлен характер влияния требуемых параметров сенсорного устройства на его чувствительность.
Практическая значимость результатов работы заключается в разработке механико-математических моделей реверсивного микродвигателя вращения и сенсорного устройства с электростатическим накатом упругих лент, которые могут быть использованы в построении новых пленочных микроэлектромеханических устройств. Полученные результаты могут быть использованы в разработке новых моделей, методов, алгоритмов и программных средств, позволяющих решать задачи проектирования новых типов микроэлектромеханических систем и их элементов.
Личный вклад автора заключается в разработке адекватных динамических моделей микродвигателя вращения и сенсорного устройства, создании методики определения основных динамических параметров микромеханических устройств, в проведении численного моделирования, подготовке публикаций по выполненной работе.
Современный уровень развития микроэлектромеханических устройств. Микроэлектромеханические устройства можно подразделить на несколько обобщенных групп: сенсорные — это микродатчики, микрогенераторы энергии, МЭМС-ключи, микроклапаныпозиционирующие, также включающие микроинжекторымикродвигатели, объединяющие в себе и микроактюаторы. Датчики давления — одни из самых первых устройств, реализованных с применением технологий микрообработки кремния [38]. Устройства широко использовались в различных индустриальных и биомедицинских областях. Распространены датчики пьезоэлектрические, тензорезистивные, емкостные, резонансные.
Тензорезистивный эффект в кремнии широко используется для создания датчиков давления. Напряжение, вызванное давлением, деформирует кремниевую мембрану. Внешнее давление на мембрану приводит к деформации резисторов, таким образом, вызывая изменение величины сопротивления в соответствии с приложенным давлением.
В [38] приведен один из емкостных датчиков давления (рис. 1). Мембрана с подложкой формирует конденсатор переменной емкости. Увеличение внешнего давления заставляет мембрану отклоняться к подложке, увеличивая величину емкости.
Металлизация Кремниевая мембрана.
Вакуумная полость і Оксид.
Кремниевая пластана.
Рис. 1. Поперечное сечение емкостного датчика давления, полученного способом «контакта» [38].
Инерциальные датчики — микромеханические акселерометры [46], [49], [50], [74], [78], [79], [96], [101] важные типы МЭМС-датчиков на основе кремния. В настоящее время микромеханические датчики инерциальной информации все больше используются в космической и ракетной технике, в транспортных системах для решения задач ориентации, навигации и управления движением [16].
Основным принципом для съема информации является емкостной принцип [34], [55], его применяют такие производители как Analog Devices, Bosch, Freescale, Kionix, Oki Electric, STMicroelectonics. Известен также пье-зорезистивный эффект считывания, который используется Hitachi Metals, Matsushita, Fujitsu, Hokuriku.
Емкостные МЭМС акселерометры имеют ряд преимуществ перед другими из-за более высокой чувствительности, низкого шума и дрейфа [18]. В общем случае используется дифференциальная емкостная схема считывания: емкость отсчитывается относительно обеих сторон подвижной пластины, при ее смещении увеличивается емкость одного конденсатора и одновременно уменьшается емкость другого, что дает возможность обеспечить линейность очень малых смещений, до долей 1 нм.
Для уменьшения размеров акселерометров, инерционную массу чувствительного элемента (при сохранении его массы) иногда выполняется из материала с более высокой плотностью, чем у кремния, например из никеля или его сплавов (р5, = 2,3 г/см3, р^ = 8,9 г/см3), осаждаемых на поверхность подвижной пластины электрохимическим методом.
В работах [74], [78], [101] представлены различные типы МЭМС акселерометров.
Например, в работе [101] приводится конструкция и эксплуатационные испытания в цикле колебаний для МЭМС резонаторного акселерометра (рис. 2).
Рис. 2. Фотография акселерометра [101].
Результаты эксплуатационных испытаний в [95] показали, что достигнуты следующие характеристики: номинальная частота колебаний 5701,3 Гц, динамический диапазон ускорений —10 д 10д, стабильная систематическая ошибка составляет ~0,7д в течении 10 часов, время считывания < 200мс. Приведены также итоги натурных испытаний: частотный диапазон при случайной вибрации с ускорением 4д составляет 20-^-2000 Гц, температурный эксплуатационный диапазон составляет —40°Сг- 70 °C, хранение допускается при —50°Сг- 85 °C, тесты на удар проводились при 75д и 1200 $ с длительностями 10 мс и с 2 мс соответственно.
Принцип действия электростатических микрогенераторов энергии основан на работе механических сил против электростатических сил притяжения разноименных зарядов [40]. В работах [5], [60] И. Л. Багинским и Э. Г. Косцовым предложен метод преобразования энергии механических колебаний (2−20 мкм) в электрическую. Это преобразование осуществляется в схеме двухемкостного электростатического генератора, представляющего собой совокупность металлических полосок с нанесенной поверх них пленкой се-гнетоэлектрика, созданную с помощью технологии микроэлектроники.
В [10] В. П. Драгуновым, Э. Г. Косцовым были рассмотрены особенности функционирования двухконденсаторного микроэлектромеханического преобразователя энергии механических колебаний мембран, создаваемых по технологии микроэлектроники, в электрическую энергию. В работах [11], [64 ] проведен анализ особенностей функционирования и сравнение характеристик одно — и двухконденсаторных преобразователей микромеханических микроколебаний в электрическую энергию при модуляции величины межэлектродного зазора с учетом взаимного влияния электрических и упругих сил. Показано, что основными ограничивающими факторами повышения мощности микроэлектромеханических преобразователей являются эффекты «схлопывания» и условие сохранение системой положительной жесткости. Рассмотрена возможность генератора электрической энергии при наличии «реальных» источников микроколебаний с широким спектром.
Микроэлектромеханический ключ [71] - миниатюризированный компонент, производимый по технологиям микромеханической обработки. Такие МЭМС устройства обладают высокой эффективностью в смысле вносимых потерь, изоляции, линейности и предназначены для замены вне чиповых твердотельных аналогов, которые обеспечивают переключение между трактами сигнала приемника и передатчика. МЭМС-ключи могут быть подразделяются на две категории: емкостного типа и тип «Контакт металл-к-металлу». Энергопотребление емкостного ключа практически равно нулю, что является необходимым условием в портативной низко потребляющей аппаратуре с большим числом циклов переключения.
Радиочастотный емкостной МЭМС-ключ [71] изготавливается по технологии поверхностной микромеханической обработки, ключ активируется напряжением постоянного тока и имеет низкие потери. Ключи «Контакт ме-талл-к-металлу» важны для коммутации широкополосных сигналов, включая постоянный ток. Наиболее распространенная конструкция устройства представляет собой консольную балку или зафиксированную с двух сторон моста с металлической контактной площадкой, помещенной на конце балки или под центом моста. После электростатической активации формируется контакт между подвижной площадкой и электродом на подложке [80], [108], [111]. Схематическое сечение ключа [80] показано на рис. 3.
Верхнее положение.
Рис. 3. Схематическое поперечное сечение ключа типа «Контакт металл — к — металлу» [80].
В последнее время в различных областях техники наблюдается возрастающий интерес к микроструйным технологиям (микронасосы, микроклапаны, микроинжекторы), которые способны управлять небольшими объемами жидкостей, что важно, например, для изменения траектории движения на орбите малогабаритных спутников, для проведения количественных химического и биологического анализов в медицине.
В публикации [95] рассмотрена матрица электростатических клапанов, разработанных J. Robertson совместно с Wise K. D, в качестве конструкционной формы клапана используется затвор для герметизации потоков жидкости и газов.
В [106] представлен ударопрочный электростатический привод высокого давления для использования в микроклапанах, созданный W. Wijngaart, Н. Ask, Р. Enoksson, G. Stemme. В работе подробно рассмотрены теоретические и конструктивные параметры, используемые для разработки и анализа электростатического микроклапана.
Кроме электростатических существуют также пьезоэлектрические и электромагнитные клапаны.
Пьезоэлектрические материалы активно внедряются в МЭМС устройства. В работах [100], [105] М. Stehr и Т. Watanabe соответственно, рассмотрели пьезоэлектрические приводы для применения в микроклапанах. Пленка пьезоэлектрического материала размещается на подвижной мембране, в результате подаче напряжения пленка, деформируясь, перемещает клапан.
D.J. Sadler совместно с коллегами в работе [97] представили микроклапан, в котором используется схема электромагнитного включения. Конструкция рассматриваемого клапана, способствует тесному контакту между мембранной микроклапана и его седлом, в результате при закрытии клапана обеспечивается достаточно низкая утечка.
В работе [81] W. Jackson рассматривает электромагнитый микроклапан, с использованием форполимера PDMS {Polydimethylsiloxane [35]) в качестве мембранного материала. Форполимер PDMS заполняется мягкими магнитными частицами, а затем отвердевает для образования мембраны клапана.
Принцип действия же большинства электростатических микроактюато-ров (рис. 10) [77], в отличие от приведенных в [70], заключается во втягивании подвижного электрода в межэлектродный зазор (рис. 4). Недостатки: малые удельная емкость (2 -ь 5пФ/мм2) и энергоемкость (0,01 Дж/м2), силы тяги несколько мкН и небольшой диапазон перемещений, 5−10 мкм. Для увеличения мощности необходимо параллельное включение большого числа микроактюаторов, количественное увеличение которых приводит к уменьшению площади микросхемы. spring suspension.
Fixed.
Рис. 4. Фотография и схема микроактюатора [77].
В настоящее время наиболее развиты электростатические микродвигатели, как вращательного, так и линейного движения, с воздушным зазором между подвижной и неподвижной частями [73], [75], [76], [84], [91], [104], [ПО].
В работе [91] описывается изготовление и характеристика вращательного планарного устройства переменной емкости, изображенного на рис. 5, рис. 6.
Рис. 5. Фотография готового устройства с убранным и перевернутым ротором [91].
Рис. 6. Фотография устройства с двухрядным расположением выводов керамического корпуса соединенного контактами с устройством [91 ].
Кроме планарного устройства [91], изображенного на рис. 5, рис. 6 существуют и другие планарные микроэлектромеханические двигатели.
Перечислим ряд планарных микродвигателей: электростатические воздушные планарные двигатели (ЭВПД) [68], [69], [72], [94], [107]- пьезоэлектрические планарные двигатели (ПЭПД) [92], [102]- электротепловые планарные двигатели (ЭТПД) [103]- электростатические диэлектрические планарные двигатели (ЭДПД) [73], [84], [109].
Приведенные двигатели имеют ряд недостатков [12], [19]. Изготовление ЭВПД требует дорогостоящие операции, связанные с технологией изготовления (необходимо обеспечить точность не ниже 0,1 мкм). В ПЭПД затруднителен поиск наиболее эффективной передачи энергии на подвижный ротор, достаточно низкая эффективность электромеханического преобразования энергии из-за малого значения коэффициента электромеханической связи в пленочных пьезоэлектриках. В ЭТПД при значительных токах возможно получение низких напряжений в ущерб энергетической эффективности.
Современный уровень развития пленочных микроэлектромеханических устройств. В пленочной микроэлектромеханике определены пути создания относительно мощных пленочных емкостных устройств универсального назначения, в которых высокая энергоемкость достигается в результате увеличения рабочей поверхности, без расхода дополнительного количества материалов на изготовление обкладок, так и в результате использования размерного физического эффекта увеличения рабочей напряженности электрического поля при уменьшении толщины изоляции. Основной элемент этих машин с возвратно-поступательным движением представляет собой конденсатор переменной емкости, выполненный в виде многослойного емкостного пакета из металлических и диэлектрических пленок с прослойками газа между ними.
На примере пленочного электростатического реле впервые было получено прямое свидетельство энергетического преимущества электростатического устройства перед электромагнитными. По мере развития теории электромеханических преобразователей энергии, становится очевидно, что по ряду свойств емкостные устройства и машины с гибкими обкладками имеют неоспоримые преимущества перед индуктивными.
Простота конструкций для всех пленочных емкостных устройств и является основой высокой технологичности.
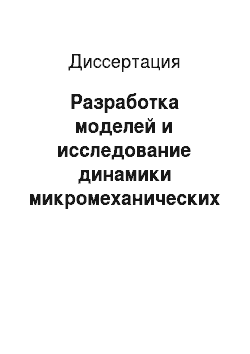
В патенте на изобретение [57] представлен разработанный российскими учеными В. Я. Принцым, А. В. Принцым, А. В. Копыловым из Института физики полупроводников СО РАН электростатический микро -, нанодвига-тель. Двигатель содержит источник питания, две пластины, расположенные друг относительно друга с зазором и с возможностью изменения за счет электростатического воздействия их пространственной ориентации друг относительно друга. В микро -, нанозазоре между пластинами размещена с возможностью фиксации гофрированная самоформирующаяся упругая нано-оболочка — пружина, выполненная из механически напряженной пленки. Нанооболочка — пружина изменяет свою форму и коэффициент упругости при изменении взаимного расположения пластин, при подаче на пластины или также на нанооболочку — пружину напряжения от источника питания и отработке ими электростатического воздействия.
На рис. 7 приведена схематическая иллюстрация работы торсионного электростатического двигателя с гофрированной нанооболочкой — пружиной: а — схематичное изображение исходной структуры с гофрированной нанооболочкой — пружиной, расположенной в зазоре между пластинамисхематическое изображение двигателя с подвижной верхней пластинойв — вращение верхней пластины в результате изменения формы правой половины нанооболочки — пружины за счет электростатического притяжения (при притяжении правой части нанооболочки — пружины к нижней неподвижной пластине, верхняя подвижная пластина поворачивается вправо) — г — при притяжении левой части нанооболочки — пружины верхняя подвижная пластина поворачивается влевогде 1 — неподвижная пластина (подложка), 2 — подвижная пластина, 3 — нанооболочка — пружина, 4 — жертвенный слой. а) б) в) г).
Рис. 7. Схематическая иллюстрация работы торсионного электростатического двигателя с гофрированной нанооболочкой — пружиной [57].
На рис. 8 приведены фотография реального микро -, нанодвигателя с закрепленной верхней подвижной пластиной посредством латеральных пружинок, с краевой гофрировкой, используемой в качестве нанооболочкипружины: а — вид сверхуб — вид сбоку (сечение) — в — массив краевых гофрировок — нанооболочек — пружин (верхняя подвижная пластина, функцию которой выполняет пленка СаАз, удалена) — г — укрупненное изображение нанооболочки — пружины, выполненной в виде краевой гофрировки по периметру четырехугольника, ориентированной освобожденной от связи с подложкой частью внутрь.
Рис. 8. Фотография реального микро -, нанодвигателя [57] мкостным конструкциям с электростатическим накатом проводящих лент на поверхность диэлектрических пленок посвящена монография [30], ряд статей [2], [4], [6], [7], [13], [14], [17], [18], [19], [20], [22], [23], [24], [26], [61], [62], [63], [65], [66], [67], [85], [86], [87], [88], патенты [56], [89], [90].
Японскими исследователями К. Sato, М. Shikida {Japan, Nagoya University) разработан электростатический микроклапан с З'-образной пленочной ленты (рис. 9), который под действием электростатических сил в результате деформации накатывается на слои диэлектриков, которые нанесены в микроклапане [98], [99].
Рис. 9. Электростатический микроклапан с 5-образным пленочной лентой [98], [99].
Стоит отметить работу [15] отечественных ученых В. Л. Дятлова из Института математики из сибирского отделения Российской академии наук (ИМ СО РАН), Э. Г. Косцова из Института автоматики и электрометрии СО РАН (ИАиЭ СО РАН), в которой рассматриваются принципы создания пла-нарных емкостных пленочных электростатических и пьезоэлектрических двигателей методами технологии микроэлектроники. В публикации анализируется совокупность требований к параметрам диэлектрика — основного компонента указанных двигателей. Показано, что лучшими диэлектриками при решении данной задачи являются пьезоэлектрики. Рассматриваются преимущества использования пьезоэлектрических пленок по сравнению с пьезо-керамическими пластинами, применяемыми в классических пьезодвигателях. Проведен сравнительный анализ энергоемкости различных типов двигателей, показаны преимущества пленочных емкостных двигателей в диапазоне мощностей Ю-5 — 103 Вт. Этими же авторами в [13] отмечено, что для пьезоэлектрических двигателей характерно изнашивание контактных элементов и плохая воспроизводимость параметров двигателя.
Также известны работы [58], [59] зарубежных ученых, в которых описываются различные пленочные емкостные устройства, в которых электромеханическое преобразование энергии основано на накате металлической ленты на поверхность диэлектрика.
В. JI. Дятловым, Э. Г. Косцовым разработан новый принцип электромеханического преобразования энергии, основанный на эффекте электростатического наката тонких металлических лент на поверхность сегнетоэлектриче-ской пленки. В работах [13], [14], [15], [19], [24], [87], [89], [90] были описаны микродвигатели — электростатические сегнетоэлектрические планарные двигатели (ЭСПД), создаваемые методами технологии микроэлектроники и основанные на указанном принципе преобразования энергии. Сегнетоэлектрические микродвигатели имеют высокую механическую надежность, простую систему управления, а также обладают большой технологичностью.
В работах [14] приведены следующие особенности сегнетоэлектриков:
— величина диэлектрической проницаемости s сегнетоэлектриков превосходит значение 8 обычных диэлектриков на 2−3 порядка;
— нелинейность поляризации от напряженности электрического поля с в выходом на участок насыщения, при низких коэрцитивных полях — до 104 В/см;
— малая концентрация центров захвата носителей заряда и небольшая их энергетическая глубина (совершенная кристаллическая структура сегне-тоэлектрика),.
— высокая твердость материала пленки, по Моссу более 5,.
— заданная степень шероховатости, размеры микровыступов 50 — 500 A.
Материалом сегнетоэлектрической пленки служит ниобат бария стронция (НБС — NBS, niobate barium strontium), химическая формула которого имеет вид Ва0 5Sr0 5Nb206, значение диэлектрической проницаемости данного материала? = 1000, пленки — текстурированные с ориентацией кристаллической оси С нормально к плоскости подложки.
В настоящее время в качестве материала сегнетоэлектрика можно использовать пленку модифицированного лантаном Ba0 5Sr0 5Nb206 + 1% La, в этом случае диэлектрическая проницаемость лежит в пределах е = 3000 -г-5000.
Э. Г. Косцовым, B.C. Соболевым в работе [21] рассматривается новый сИ$гасИуе — СЬУ), в конструкции, изображенной на рис. 11 применяется се-гнетоэлектрическая пленка.
1- подложка из кремния, 2- электрод, 3 — диэлектрическая пленка, 4 — сегне-тоэлектрическая пленка- 5 — управляемый полем воздушный зазор;
Элемент СЬУ отличается от известных подобных элементов физическим принципом работы и конструкцией, а также значительно более низким управляющим напряжением, отсутствием гистерезиса и возможностью работы в аналоговом режиме. Элемент состоит из подложки (кремний или сапфир), электрода, тонкой сегнетоэлектрической пленки с высоким значением диэлектрической проницаемости, управляемого полем воздушного зазора, подвижного электрода отражающего свет.
На пути разработки наиболее эффективных микронасосов существует ряд трудностей, связанных, в основном, с удельной энергоемкостью их мик-роатюаторов. Работа большинства микронасосов основана на двух принципах передачи энергии от внешнего источника, инжектируемой капле или струе жидкости. Первый основывается на принципе, когда накачка энергии осуществляется непосредственно в жидкость. В работе [2] Э. Г. Косцова рассмотрена возможность построения высокоэнергоемких микроактюаторов с электростатическим накатом металлических лент на поверхность сегнетоэлектрической пленки, работающих в циклическом режиме, высокопроизводительных насосов и инжекторов микроструй жидкости, конструкции которых приведены на рис. 12. элемент управляемой полем дифракционной решетки (Grating Light Valve.
TM.
Рис. 11. Конструкция элемента GLV [21]:
6 — подвижный электрод, 7 — световой поток.
Сопло.
Сопло.
Мембрана.
Мембрана.
Подштия платформа" Гибкие і:онеоли~.
Лепесток.
Подложка.
В>од бронза.
Сегнетоппемк".
Пружина.
ВХОДНОЙ клапан.
Рис. 12. Схемы конструкции микроинжекторов [20].
Косцовым совместно с Соколовым в [22] проведено исследование возможностей построения эффективных электростатических актюаторов — приводов, создаваемых по технологии микроэлектроники, для форсунок топлива дизельного двигателя. Принцип работы актюаторов с высокой удельной энергоемкостью (до 0,3.3 Дж/м~) основан на электромеханическом преобразовании энергии в нанометровых зазорах протяженностью 5 .200 нм, разделяющих поверхности подвижного электрода и слоя сегнетоэлектрика. Форсунки способны подавать топливо под большим давлением — свыше 100 МПа и за короткое время — сотни микросекунд и менее. Они по сравнению с современными пьезоэлектрическими форсунками обладают значительно меньшими размерами и массой, а также возможностью сокращения времени впрыска.
В работах Э. Г. Косцова и соавторов [19] приведены следующие требования к металлической ленте, которая является преобразователем энергии:
— тонкая металлическая пленка имеет должен иметь модуль Юнга Е не менее 1011 Н/м2;
— толщина пленки лежит в пределах 1. 2 мкм, длина определяется необходимым диапазоном перемещения подвижной пластины (слайдера), и величиной шага за один такт.
Кроме того, расстояние между нижней поверхностью слайдера и плоскостью сегнетоэлектрической пленки лежит в диапазоне 5. 300 мкм.
Э. Г. Косцовым в качестве материала для ленты используется берилли-евая бронза с 2% бериллия (Beryllium Copper), который удовлетворяет предъявленным требованиям.
Аналитические результаты Э. Г. Косцова были получены с использованием метода энергетического баланса. Плотность прилегания ленты к поверхности сегнетоэлектрической пленки моделировалась коэффициентом неплотного прилегания ленты, изменяющегося в пределах от 0,1 до 0,5 [14].
Эффект электромеханического преобразования энергии, основанный на электростатическом накате проводящей ленты, был применен Д. Ю. Ляпуновым в электромеханизме [56] (рис. 10).
Рис. 10. Конструктивная схема емкостного электромеханизма с обра.
В электромеханизме (рис. 10) при возникновении внешнего силового воздействия на корпус 1, возникает его деформация, в результате чего изменяется емкость конденсатора, образованного электродом 4, слоем диэлектрика 3 и металлической подложкой 2. Сигнал емкости поступает с измерителя емкости системы питания и управления 5 (СПиУ) на микроконтроллер. Также в [56] указаны режимы работы указанного электромеханизма в режимах датчика и двигателя.
Проведенный анализ исследований в области микросистемной техники, указывает на возможность создания новых микродвигателей и сенсорного устройства, основанных на новом электромеханическом преобразовании 5 4 тимым преобразованием энергии [56] энергии — электростатическом накате. Этой проблеме и посвящена настоящая работа.
Положения, выносимые на защиту (личный вклад соискателя).
Разработана динамическая модель реверсивного микродвигателя вращения с системой емкостных микроактюаторов с электростатическим накатом упругих лент. На основе расчетной модели пленочного емкостного электростатического микроактюатора, рассмотрена динамика в шаговом движении, проведена оценка проскальзывания накатывающегося на поверхность сегнетоэлектрической пленки края ленты, смоделирован процесс разгона с последующим выходом на квазиустановившееся движение в режимах с регулированием и без регулирования. Построены характеристики реверсивного микродвигателя вращения.
Разработана динамическая модель микромеханического сенсорного устройства с системой емкостных микроактюаторов с электростатическим накатом упругих лент. Устройство может быть использовано для создания датчика ускорения (акселерометра) и датчика силы (давления). Определены соотношения для упруго-массовых параметров, необходимые для получения максимальной эффективности составной части сенсорного устройства — пленочного микроактюатора, оцениваемого по следующим параметрам: скорость, перемещение и время движения слайдера. Определены области допустимых значений основных параметров сенсорного устройства исходя из значений допустимых механических напряжений и максимальных углов поворота сечений лент, а также от величины линейной зоны для параметра чувствительности устройства. В указанной зоне построена линейная модель сенсорного устройства. Установлены влияния базового напряжения и базового угла наклона лент на величину параметра чувствительности системы.
Работа выполнена при поддержке гранта РФФИ (проект № 12−08−1 072-а), Совета по грантам Президента Российской Федерации (победитель конкурса 2013 года на право получения стипендии Президента РФ молодым ученым и аспирантам № СП-4911.2013.3) и программы УМНИК. («Участник молодежного научно-инновационного конкурса») 2012 года.
Апробация работы. Результаты работы докладывались и обсуждались на:
— конкурсе «Участник молодежного научно-инновационного конкурса» («У.М.Н.И.К.»), проводимой при поддержке фонда содействия развитию малых форм предприятий в научно-технической сфере (Москва, МЭИ, 2012 г.);
— международной молодежной научно-практической конференции «Мобильные роботы и мехатронные системы» посвященной 300-летию со дня рождения М. В. Ломоносова и 90-летию со дня рождения академика РАН Д. Е. Охоцимского (Москва, НИИ Механики МГУ, 2011);
— I всероссийской научно-практической конференции молодых ученых «Инновационные подходы к развитию вооружения, военной специальной техники» (Москва, Академия Генерального Штаба ВС РФ, 2010 г.);
— академических чтениях по космонавтике «Актуальные проблемы российской космонавтики» (Москва, МГТУ им. Баумана, 2010 — 2012 г. г.);
— конференции-конкурсе молодых ученых МГУ (Москва, НИИ Механики МГУ, 2011);
— международных научно-технических конференциях студентов и аспирантов «Радиоэлектроника, электротехника и энергетика» (Москва, Московский энергетический институт, 2008 — 2012 г. г.),.
— XX международной научно-технической конференции «Информационные средства и технологии» (Москва, МЭИ, 2012 г.).
Диссертация состоит из введения, трех глав, заключения, списка литературы. Общий объем работы 138 стр., 12 стр. списка литературы, насчитывающего 111 наименований.
Основные результаты, полученные в работе.
1. Разработана электромеханическая модель реверсивного микродвигателя вращения.
2. В рамках принятой модели установлено снижение на 17% электростатического давления на упругую ленту микроактюатора вследствие неоднородности электрического поля в конденсаторе переменной емкости.
3. Определены соотношения для упруго-массовых параметров, необходимые для получения максимальной эффективности микроактюатора оцениваемой по следующим параметрам: скорость, перемещение и время движения слайдера в шаговом режиме.
4. Численным моделированием пассивного движения микроактюатора определено время восстановления исходной формы ленты в зависимости от упруго-массовых параметров системы.
5. Исследованы режимы разгона и квазиустановившегося движения «с регулированием по максимальной скорости (или предельному углу)» и «без регулирования» при различных значениях упруго-массовых параметров микроактюатора. Установлено, что большая величина квазиустановившейся скорости слайдера может быть достигнута в режиме «без регулирования», если при выборе длительности и тактовой частоты импульсов использовать их асимптотические значения, определенные в режимах «с регулированием».
6. Разработана методика построения характеристик микродвигателя.
7. Разработана динамическая модель микромеханического сенсорного устройства с электростатическим накатом упругих лент на поверхность се-гнетоэлектрической пленки.
8. Определены области допустимых значений основных параметров сенсорного устройства исходя из величин допустимых механических напряжений и максимальных углов поворота сечений лент, а также от величины линейной зоны для чувствительности устройства.
9. Построена линейная модель сенсорного устройства. Установлено, что увеличение базовых напряжения и угла наклона лент приводит к повышению чувствительности.
ЗАКЛЮЧЕНИЕ
.
В настоящей диссертации изложены научно-обоснованные решения, имеющие существенное значение для проектирования и создания новых типов микроэлектромеханических устройств, основанных на электромеханическом эффекте преобразования энергии — электростатическом накате тонкой металлической ленты на поверхность сегнетоэлектрической пленки, а также повышении технических и эксплуатационных характеристик систем на их основе.
Список литературы
- Аполлонский С.М. Дифференциальные уравнения математической физики в электротехнике. Учебное пособие. — СПб.: Питер, 2012.
- Ахметов Д.Г., Косцов Э. Г., Соколов A.A. Микроэлектромеханические электростатические высокопроизводительные инжекторы микроструй жидкости // Нано- и микросистемная техника. 2008. № 1. С. 53−60.
- Антуфьев Б.А. Колебания неоднородных тонкостенных конструкций-М.: МАИ, 2011. 176 с.
- Багинский И.Л., Косцов Э. Г. Обратимый быстродействующий электростатический «клей» // Известия вузов «Электроника». 2010. № 2. С. 18 -22.
- Багинский И.Л., Косцов Э. Г. Анализ возможности создания микроэлектронного электростатического генератора энергии // Автометрия. 2002. № 1. С.107−122.
- Бекишев Р. Ф., Ляпунов Д. Ю. Математическое моделирование емкостного пленочного микродвигателя // Известия Томского политехнического университета. 2006. Т. 309. № 1. С. 157−159.
- Бекишев Р.Ф., Семенова Л. Н., Ляпунов Д. Ю. Емкостные микродвигатели с катящимся ротором // Известия Томского политехнического университета. 2004. № 1. С. 137−140.
- Бутузов В. Ф, Васильева А. Б. Асимптотические разложения решений сингулярно возмущённых уравнений. М.: Наука, 1973.
- Григолюк Э.И., Шалашилин В. И. Проблемы нелинейного деформирования : Метод продолжения решения по параметру в нелинейных задачах механики твердого деформируемого тела. М.: Наука, 1988.
- Драгунов В.П., Косцов Э. Г. МЭМС электростатический генератор энергии // Нано- и микросистемная техника. 2007. № 11. С. 47−52.
- Драгунов В.П., Косцов Э. Г. Особенности функционирования электростатических микрогенераторов энергии // Автометрия. 2009. № 3. С. 6273.
- Дятлов В.Л., Коняшкин В. В., Потапов Б. С., Пьянков Ю. А. Пла-нарные электрические микродвигатели // Электричество. 1996. С. 8−18.
- Дятлов B. JL, Косцов Э. Г. Высокоэнергоемкие микродвигатели на основе тонких сегнетоэлектрических плёнок — Микросистемная техника. 1999. № 1.С. 22−31.
- Дятлов B. JL, Косцов Э. Г. Высокоэффективные электростатические микродвигатели на основе тонких сегнетоэлектрических пленок // Автометрия. 1999. № 3. С. 3−23.
- Дятлов B. JL, Косцов Э. Г. Планарные пленочные электростатические и пьезоэлектрические двигатели // Автометрия. 1996. № 2. С. 101−110.
- Журавлев В.Ф. Бесплатформенная инерциальная система минимальной размерности (Пространственный осциллятор датчик полной инер-циальной информации) // Изв. РАН Механика тв. тела. 2005. № 5. С.5−10.
- Косцов Э.Г., Фадеев С. И., Колесников A.A. Высокоэнергоемкие микроэлектромеханические коммутаторы // Нано микросистемная техника, № 8. 2007. С. 66−71.
- Косцов Э.Г. Состояние и перспективы микро и наноэлектромеха-ники // Автометрия 2009. № 3. С. 3−52.
- Косцов Э.Г., Багинский И. Л., Буханец Д. И., Кащеев Э. JI. Электростатический двигатель для быстродействующих микромеханических устройств // Микросистемная техника. 2004. № 4. С. 2−7.
- Косцов Э.Г., Камышлов В. Ф. Быстродействующие электростатические микроклапаны // Нано- и микросистемная техника. 2006. № 12. С. 5759.
- Косцов Э.Г., Соболев B.C. Низковольтный элемент программируемой полем динамической дифракционной решетки // Автометрия. 2010. № 3. С. 101−109.
- Косцов Э.Г., Соколов A.A. Микроэлектромеханические инжекторы топлива для дизельных двигателей // Нано микросистемная техника. 2010. № 8. С. 30−34.
- Косцов Э.Г. Обратимый электростатический «клей» // Наука из первых рук. 2009. № 2. С.8−9.
- Косцов Э.Г. Шаговые емкостные высокоэнергоемкие микродвигатели // Электронные компоненты. 2001. № 1. С. 11−15.
- Кузнецов О. А., Погалов А. И., Сергеев В. С. Прочность элементов микроэлектронной аппаратуры М.: Радио и связь, 1990.
- Матвеев А. Н. Электричество и магнетизм М.: Высшая школа, 1983.
- Моисеев H.H. Асимптотические методы нелинейной механики -М.: Наука, 1981 г.
- Образцов И.Ф., Нерубайло Б. В., Андрианов И. В. Асимптотические методы в строительной механике тонкостенных конструкций М.: Машиностроение, 1991.
- Плёночная электромеханика B.JI. Дятлов, В. В. Коняшкин, Б. С. Потапов и др. Новосибирск: «Наука», 1991.
- Распопов В. Я. Микромеханические приборы: учебное пособие -М.: Машиностроение, 2007.
- Романенко В. Пластиковые транзисторы в фонтанах ультрафиолета // CHIP NEWS. Инженерная микроэлектроника. 2009. № 1. С. 43−45.
- Справочник по математике для инженеров и учащихся ВТУЗОВ И. Н. Бронштейн, К. А. Семендяев. -М.: Наука, 1980.
- Справочник Шпрингера по нанотехнологиям под ред. Б. Бхушана -М.: Техносфера, 2010. Т. 1.
- Тенэсеску Ф., Крамарюк Р. Электростатика в технике М.: Энергия, 1980.
- Тимошенко С.П. Сопротивление материалов М.: Наука. 1965. Т.2. 480 с.
- Устинов В.Ф., Степанов A.C. Моделирование динамики электростатического планарного микродвигателя // Вестник МЭИ. 2010. № 4. С. 1219.
- Устинов В.Ф., Степанов A.C. Анализ динамики разгона и ква-зиустановившегося режима электростатического планарного устройства // Вестник МЭИ. 2012. № 1. С. 78−84.
- Фадеев С.И. Об электростатическом притяжении плёночной металлизированной ленты // Моделирование в плёночной механике (Вычислительные системы) Новосибирск: ИМ СО АН СССР, 1981.
- Шелепин Н. А. Основные принципы создания SPICE-моделей микроэлектромеханических систем // Нано и микросистемная техника. 2004. № 9. С. 30−35.
- Akiyama Т., Fujita Н. A. quantitative analysis of scratch drive actuator using bucking motion // Proc. IEEE MEMS-95. P. 310−315.
- Akiyama Т., Collard D., Fujita H. Scratch drive actuator with mechanical links for self-assembly of three-dimensional MEMS // Journal. Of microelec-tromechanical systems. 1997. VOL. 6. № 1.
- Baginsky I.L., Kostsov E.G., Sokolov A.A. Electrostatic microgenerators of energy with a high specific power // Optoelectronics, Instrumentation and Data Processing, Allerton Press, Inc. P. 580 -592. 2010.
- Baginsky I.L., Kostsov E.G. MEMS based on thin ferroelectric layers. Book edited by: Dr. Mickael Lallart Ferroelectrics — Applications. Book 4. P. 3559. 2011. ISBN 978−953−307−456−6).
- Baginsky I.L., Kostsov E.G. High energy output MEMS based on thin layers of ferroelectric materials // Ferroelectrics. 2007. 351. P. 69- 78.
- Baginsky I.L., Kostsov E.G. High-energy capacitive electrostatic micromotors I I Journal micromechanical and microengineering. 2003. Vol. 13. P. 190−200.
- Dragunov V. P., Kostsov E.G. Specific Features of Operation of Electrostatic Microgenerators of Energy // Optoelectronics, Instrumentation and Data Processing, Allerton Press. 2009. № 3. P. 234 -242.
- Dyatlov V L., Kostsov E.G. Planar electrostatic micromotors on the basis of the ferroelectric films // Integrated Ferroelectrics. 1999. № 23. P. 149 160.
- Dyatlov V L., Kostsov E.G. Electrostatic microactuators on the basis of ferroelectric films // Journal, of the Korean Physical Society. 1998. 32. P. 17 551 756.
- Dyatlov V L., Kostsov E.G. Electromechanical energy converters of micromechanics devices on the basis of ferroelectric films // Nuclear Inst, and Methods in Physics Research. 1998. A405. P. 511−513.
- Esashi M. Packaged Sensors, Micro-actuators and Three-Dimensional Micro-fabrication // Journal, of Robotics and Mechatronics, 1995 V.7 № 3. P 200 203.
- Fedder G.K., Chang J.C., Home R.T. Termal Assembly of Polysilicon Micro-structures With Narrow Gap Electrostatic Comb Drive // Technical Digest of the IEEE Sohd-State Sensor and Actuator Workshop Hilton Head Island, SC, June 1992 .P. 63−68.
- Geisberger A., Sarkar N. Techniques in MEMS Microthermal Actuators and Their Applications // Springer US. MEMS/NEMS Handbook Techniques and Applications. 2006. P. 1191−1251.
- Goldsmith C.L., Yao Z., Eshelman S., Denniston D. Performance of low-loss RF MEMS capacitive switches, IEEE Micro. Guided Wave Lett. 1998. 8. 269−271.
- Gretillat M.A., Thiebaut P., Under C. and Rooil N.F. Integrated circuit compatible electrostatic polysilicon microrelays // Journal. Micromech Microeng, V.5 1965. P. 156−160.
- Harness T., Syms R. A. Characteristic modes of electrostatic comb-drive X-Y microactuators // Journal. Micromechanical Microengineering. 2000. Vol. 10. P. 7−14.
- Hindrichsen Christian C., Almind Ninia S., Brodersen Simon H., Hansen Rasmus Lou-Meller Karsten, Thomsen Erik V. Triaxial MEMS accel-erometer with screen printed PZT thick film // Journal. Electroceram. 2010. 25. 108−115.
- Han F. T., Wang L., Wu Q.P., Liu Y. F. Performance of an active electric bearing for rotary micromotors // Journal. Micromechanical Microengineering. 2011. 21. P. 1−10.
- Han F. T., Wu Q. P., Wang L. Experimental study of a variable-capacitance micromotor with electrostatic suspension // Journal. Micromech. Microeng. 2010. 20. P. 1−9.
- Harrie A C Tilmans, Walter De Raedt and Eric Beyne, «MEMS for wireless communications:'From RF-MEMS components to RF-MEMS-SiP» // Journal. Micromechanical Microengineering. 2003. 13. P. 139−163.
- Houlihan R. and Kraft M. Modelling squeeze film effects in a MEMS accelerometer with a levitated proof mass // Journal. Micromechanical Microengineering. 2005. 15. P. 893−902.
- Hsieh Hsieh-Shen, Chang Heng-Chung, Hu Chih-Fan, Cheng Chao-Lin, Fang Weileun A novel stress isolation guard-ring design for the improvement of a three-axis piezoresistive accelerometer// Journal. Micromechanical Microengineering. 2011. 21. P. 1−11.
- Hyman D., Lam J., Warneke B., Schmitz, Hsu T.Y., Brown J., Schaffner J., Walston A., Loo R.Y., Mehregany M., Lee J. Surface-micromachined RF MEMs switches on GaAs substrates. Int. J. RF Microw. Com-put.-Aid. Eng. 1998. 9. P. 348−361.
- Jackson W., Tran H., O’Brien M., Rabinovieh E., Lopez G. Rapid prototyping of active microfluidic components based on magnetically modified elastomeric materials // Journal. Vac. Sci. Technol. 2001. B19. P. 596.
- Jenkins D.F.L., Cunninghani M.J. and Clegg W.W. The use of composite piezoelectric thick films for actuation and control of miniature cantilevers // Microelectronic Engineering. 29. 1995. P. 71−74.
- Juneau T., Pisano A. P. Micromachined dual input axis angular rate sensor // IEEE Solid-St. Sens. Actuat. Workshop. 1996. P. 299−302.
- Kim B.-H., Chun K. Fabrication of an electrostatic track-following mi-croactuator for hard disk drives using SOI wafer // Journal. Micromech. Microengineering. 2001. Vol. 11. P. 1−6.
- Kolesnikov A. A., Kostsov E.G. High-speed electrostatic microswitchboards on the basis of ferroelectric films // Ferroelectrics. 2007. 351. P. 138−144.
- Kostsov E.G. Ferroelectric barium-strontium niobate films and multilayer structures // Ferroelectrics. 2005. 314. P. 169−187.
- Kostsov E.G. Ferroelectric-based electrostatic micromotors with nanometer gaps // IEEE Trans. Ultrasonics, Ferroelectric and Frequency Control. Special Issue on Nanoscale Ferroelectric. 2006. 53. № 12. P. 2294−2299.
- Kostsov E.G. Electromechanical energy conversion in the nanometer gaps // Proc. SPIE. 2008. 7025. 70 251.
- Kostsov E.G., Dyatlov V. L., Perlo P. Step linear electrostatic motor. United States Patent № 5,808,383. Sep. 15, 1998. Intern’l Class: H02K 41/00.
- Kostsov E.G., Dyatlov V.L., Perlo P. Electrostatic linear motor United States Patent № 5,898,254. Apr. 27, 1999. Intern’l Class: H02N 1/00.
- Kiihne S., Hierold C. Fabrication and characterization of a tethered of rotational planar variable capacitance micro drive // Journal. Micromech. Microeng. 2012. 22. P. 1−10.
- Matoba, H., Ishikawa, T., Kim, C.-J., Muller, R.S. A bistable snapping microactuator // Proc IEEE Micro Electro Mechanical Systems Workshop. 1994. P. 45−50.
- Muralt P. Ferroelectric thin films for micro-sensors and actuators: a review// Journal. Micromechanical Microengineering. 2000. Vol. 10. P. 136−146.
- PoIIa D.L. Microelectromechanical Systems Based on Ferroelectric Thin Films // Microelectronic Engineering. 29. 1995. P. 51−58.
- Robertson J., Wise K.D. A low pressure micromachined flow modulator// Sens. Actuators. 1998. A71. P. 98−106.
- Rogers J.E., Ramadoss R., Ozmun P.M., Dean R. N. A microelectromechanical accelerometer fabricated using printed circuit processing techniques // Journal. Micromechanical Microengineering. 2008. P. 1−7.
- Sato K., Shikida M. Electrostatic film actuator with a large vertical displacement // Proc. IEEE MEMS-92. P. 1−5.
- Sato K., Shikida M. An electrostatically actuated gas valve with S-shaped film element // Journal. Micromechanical Microengineering. 1994. Vol. 4. P. 205−209.
- Stehr M., Messner S., Sandmaier H., Zangerle R. The VAMP A new device for handling liquids and gases // Sens. Actuators. 1996. A57. 153−157.
- Sung Sangkyung, Lee Jang Gyu, Lee Byeungleul, Kang Taesam Design and performance test of an oscillation loop for a MEMS resonant accelerometer//Journal. Micromech. Microeng. 2003. 13. P. 246−253.
- Teegarden D., Lorenz G. and NeuL R. How to model and simulate microgyroscope systems // IEEE Spectrum July 1998. P. 66 -75.
- Wakabayashi S., Sakata M., Goto H., Takeuchi M. and Yada T. Static Characteristics of Piezoelectric Thin Film Budding Actuator Jpn // Journal. Appl. Phys. V.35. 1996. P. 5012−5014.
- Wallrabe U., Bley P., Krevet B. et. al. Design rules and test of electrostatic micromotors made by the LIGA process // Journal. Micromechanical Microengineering. 1994. Vol. 4. P. 40−45.
- Watanabe T., Kuwano H. A micro valve matrix using piezoelectric actuators // Microsyst. Technol. 1997. 3. 107- 111.
- Wijngaart W., Ask H., Enoksson P., Stemme G. A high-stroke, high-pressure electrostatic actuator for valve applications // Sens. Actuators. 2002. A100. P. 264−271.
- Yao J.J., MacDonald N. C. A micromachined, single-crystal silicon, tunable resonator // Journal. Micromechanical Microengineering. V.6 (1996). P. 257−264.
- Yao J.J., Chang M.F. A Surface micromachined miniature switch forthtelecommunication applications with signal frequencies from DC up to 40 GHz, 8 Int. Conf. Solid-St. Sens. Actuat. 1999. P. 384−387.
- Yang Y-J., Kim C-J., Matoba Muller R.S. Thermal analysis of a bistable microactuator // ASME, Symposium on Micro-Mechanical Systems, Dynamic System and Control. 1994. V.2 .P.687−693.
- Zappe S., Baltzer M., Kraus Th., Obelmeler E. Electrostatically driven microactuators: FE analysis and fabrication // Journal. Micromech. Microeng. 1997. Vol.7. P. 204−209.
- Zavracky P.M., McGruer N.E., Morriosn R.H., Potter D. Microswitches and microrelays with a view toward microwave applications // Int. J. RF Microw. Comput.-Aid. Eng. 1999. 9. P. 339−347.