Исследование анормальных и вырожденных задач оптимального управления и нелинейного анализа
Арутюнов A.B., Карамзин Д. Ю. Необходимые условия минимума в задаче оптимального импульсного управления. Нелинейная динамика и управление. Вып. 4. Сб. статей под редакцией C.B. Емельянова, С. К. Коровина. М.: Физматлит, 2004, с. 205−240. Карамзин Д. Ю. Исследование достаточных условий существования регулярного нуля у квадратичных отображений. Итоги науки. ЮФО. Математический форум. Т. 2… Читать ещё >
Содержание
Диссертационная работа посвящена исследованию анормальных и вырожденных задач, возникающих в различных областях оптимизации и нелинейного анализа. Работа состоит из пяти глав, содержание которых соответствует следующим направлениям исследования:
1. Расширение классического вариационного исчисления на задачи с разрывными траекториями. Оптимальное импульсное управление.
2. Оптимальное управление. Принцип максимума Л. С. Понтрягина для задачи с фазовыми ограничениями.
3. Теория вещественных квадратичных отображений. Условия существования регулярных нулей квадратичных отображений.
4. Исследование гладких отображений в окрестности анормальной точки. Теоремы об обратной функции и необходимые условия экстремума второго порядка в анормальных задачах оптимизации.
5. Необходимые условия локального минимума второго порядка в анормальных задачах оптимального управления.
Содержание всех пяти глав тесно связано между собой. Так, например, результаты гл. 3 существенно используются в гл. 4, а гл. 1, 2 и 5 посвящены теории оптимального управления. Результаты гл. 2, 5 могут быть с легкостью перенесены на задачи импульсного управления, исследуемые в гл. 1. В гл. 5 же показывается как результаты гл. 4 могут быть применены к исследованию анормальных (локально неуправляемых) задач оптимального управления (см. [43]).
Работа организована следующим образом. Во введении последовательно разъясняется специфика каждого из направлений, указанных выше. Приводятся краткая история и «философия» этих вопросов. Формулируются некоторые основные результаты. В самих же главах 1−5 приведены все строгие формулировки и доказательства.
0.1 Расширение классического вариационного исчисления на задачи с разрывными траекториями. Теория оптимального импульсного управления
По всей видимости, Карл Вейерштрасс был одним из первых математиков, кто придал значение тому факту, что не все задачи вариационного исчисления имеют классическое гладкое или хотя бы непрерывное решение. Причем, не имея классических решений, такие задачи могут оставаться вполне физически значимыми. Хорошо известный пример такой ситуации иллюстрируется следующей задачей вариационного исчисления.
Это есть задача о нахождении поверхности вращения, задаваемой контуром площадь которой была бы наименьшей из всех возможных- а физически — просто мембраны, натянутой на два параллельных диска радиусов Я и Й2 соответственно. Применение условий Эйлера-Лагранжа приводит к дифференциальному уравнению второго порядка и краевой задаче, которая для некоторых значений параметров Я1, Я2 решения иметь не будет. И в этом есть очевидный геометрический и физический смысл, который прямо соотносится с тем, что наблюдается на практике: когда числа Я, Я2 достаточно велики (или же когда расстояние между дисками достаточно мало) мембрана существует, а поверхность вращения гладкая. Но как только мы начнем увеличивать расстояние между дисками, мембрана будет растягиваться и в какой-то момент времени разорвется (лопнет). Математически же в этот самый момент времени гладкое и непрерывное решение задачи перестает существовать. Однако это не означает, что минимальной поверхности вращения не существует вообще. Очевидно, что в этом вырожденном случае она будет просто объединением двух
Найти минимум при ограничениях х (0) = Я, а-(1) = дисков и отрезка [0,1], их соединяющего. Это означает, что решение x (t) будет Ri при t = О, R2 при t = 1 и 0 при t е (0,1) и, таким образом, будет претерпевать разрывы. Другими словами, решение будет импульсным.
Давид Гильберт, в рамках своей известной программы ([14], 20-ая задача), предложил расширить классическое вариационное исчисление с целью покрыть и формализовать подобного рода вырожденные ситуации и, тем самым, придать строгий математический смысл разрывным решениям. Он выразил уверенность в том, что «каждая задача вариационного исчисления имеет решение, если только термин „решение“ интерпретируется правильным образом».
В 1920-х годах грузинским математиком А. Размадзе была предложена некоторая теория, в которой допускались разрывные решения задач вариационного исчисления, [24]. С появлением теории оптимального управления и принципа максимума JI.C. Понтрягина, [95], в 1950-х, теория разрывных решений задач вариационного исчисления значительно обогатилась и плавно влилась в теорию оптимального импульсного управления. Больше об истории расширений вариационного исчисления можно прочитать в обзорной статье [20]. Здесь лишь отметим, что свой вклад в эту теорию внесли Lebesgue, Tonelli, Warga, Young, Боголюбов, Гамкрелидзе, Кротов, Тихомиров и др.
Что изучает теория импульсного управления? Задачи импульсного управления покрывают собой широкий класс вырожденных задач классического вариационного исчисления и оптимального управления, в которых традиционных непрерывных решений не существует. Теория импульсного управления, предлагает, во-первых, тот способ, как интерпретировать понятие решения для таких задач, и во-вторых, тот путь, как обобщенное решение найти, представляя для этого какие-нибудь условия оптимальности. Основная идея здесь лежит в расширении самих понятий управления и траектории. Обычное измеримое ограниченное управление можно заменить, например, на борелевскую меру. Действительно, с одной стороны, любая абсолютно непрерывная борелевская мера порождает интегрируемую функцию — ее производную. С другой стороны, есть меры которые нельзя связать ни с одной функцией из Li, например мера Дирака б (т): мера множества, А есть ноль, если т ^ А и единица в противном случае. Это есть простейшее расширение класса управлений, которое, однако, уже достаточно богато и способно включить в себя много актуальных
приложений.
Приведем простой пример, чтобы проиллюстрировать сказанное и показать, как возникают импульсные управления. Рассмотрим следующую задачу.
Найти минимум / x (t)dt при ограничениях х = v, (0−2) ж (0) = 0, х (1) = 1, v (t) е [о, с].
Таким образом, мы хотим минимизировать площадь под кривой x (t), которой не разрешается расти слишком быстро. Решение здесь, очевидно, существует при любом с > 1. Принцип максимума дает следующее оптимальное управление:
N ГО, если t < —, v (t, c) =
Однако легко увидеть, что в пределе при с —? +оо, минимум перестает существовать в классе непрерывных траекторий. В самом деле, достаточно рассмотреть последовательность управлений {v (t, п)} и отвечающую им последовательность траекторий хп и увидеть, что ll^nlUi 0 при п —> оо. Поэтому минимизирующая последовательность траекторий хп сходится поточечно к разрывной функции x (t), равной нулю при t е [0,1) и единице при t = 1.
Как определить решение задачи (0.2) при с = +оо?
Решение может быть найдено с помощью расширения множества допустимых управлений и введения импульсных управлений. Для задачи (0.2) борелевские меры оказываются подходящими на роль импульсных управлений. Например, любому обычному управлению г>(£) можно поставить в соответствие абсолютно непрерывную меру /I с производной Радона-Никодима г>, т. е. ¿¡-л = у (Ь)сИ. Но, как уже было сказано, будут и другие импульсные управления, которые уже не могут быть сведены к обычным, например, мера Дирака 6(т).
Таким образом, обычная задача управления (0.2) расширяется и теперь уже по-новому, в рамках теории импульсных управлений, записывается следующим образом:
Найти минимум / х (Ь)сИ при ограничениях (1х = ж (0) = 0, х{1) = 1, (х>0.
Здесь траектория х ({) принадлежит уже классу функций с ограниченным изменением и может претерпевать разрывы. При этом запись (Iх = с1/л следует понимать в интегральном смысле или на языке мер, что означает: мера, порожденная траекторией х (Ь), абсолютно непрерывна относительно меры ц, а ее производная относительно ¡-л в данном случае равна единице (т.е. меры совпадают).
Основной шаг сейчас — это убедиться в существовании решения у новой задачи. Действительно, легко видеть, что оптимальная траектория в расширенной задаче существует и это: х (Ь) = 0 при Ь < 1, и ж (1) = 1, что есть, с одной стороны, простое следствие неотрицательности функционала в задаче (0.2). С другой же стороны, и указывая на значительно более общую технику доказательства, можно сказать, что существование решения будет вытекать из слабой-* секвенциальной компактности единичного шара в пространстве С*([0,1]).
Замечание 0.1 Было рассмотрено простейшее расширение задачи оптимального управления. Однако, заменив в задаче (0.2) под интегралом x (t) на x2(t) и рассмотрев ограничение на управление v Е [—с, с], при с —" оо, легко прийти и к простейшему примеру расширения задачи классического вариационного исчисления.
В силу отмеченного свойства компактности процедура расширения для линейных динамических систем тривиальна. Сложность расширения, однако, возрастет, как скоро мы начнем рассматривать более общие управляемые динамические системы, например, вида х = f (x, и) + g (x)v, v G К, (0.3) здесь и — обычное (классическое) ограниченное управление, функция/ определяет обычную динамику, 1 hod — неограниченный по евклидовой норме управляющий вектор, принадлежащий некоторому выпуклому замкнутому конусу К, и g — некоторая матричная функция.
Как описать решение в таком случае? Процедура расширения, описанная выше, уже не применима, поскольку слабые-* предельные переходы в нелинейных системах некорректны, и это демонстрируется простейшими примерами. Например, динамической системой с двумерным неограниченным управлением v — (fi,^): х — xvi + ж2г>2, ^(0) = 1.
Если мы постараемся расширить эту систему в класс борелевских мер, предполагая, что ||г>Н^ < const (полная вариация траектории должна быть, конечно, ограниченной), то мы увидим, что каждому управлению, то есть каждой векторной мере, будет соответствовать уже целая
1 Эту функцию нам необходимо рассматривать, чтобы включить в наши рассмотрения классическую теорию оптимального управления. интегральная воронка траекторий, получающихся при аппроксимации этой векторной меры абсолютно непрерывными мерами. И поэтому каждая из таких траекторий будет претендовать на звание решения динамической системы, отвечающего векторной мере.
Случай динамических систем вида (0.3) и задач управления, с ними связанных, был подробно изучен в кандидатской диссертации автора [53, 77]. Как выяснилось, борелевских мер в этом случае уже недостаточно для того, чтобы описать все возможные достижимые управления. Тогда импульсное управление оказывается чем-то большим, чем просто борелевская мера, и теперь оно — это пара (/л- {г>т}), где /л -борелевская мера, a {iv} - некоторое семейство обычных измеримых и существенно ограниченных функций, которое называется присоединенным семейством (его точное определение см. в п. 1.3). По своему смыслу присоединенные управления действуют на разрыве системы, т. е. в тот момент, когда происходит импульс. В работе [77] было показано, что интегральная воронка, возникающая при аппроксимации меры fj, абсолютно непрерывными мерами, исчерпывается траекториями, построенными по присоединенным к ц семействам, и обратно, по любому присоединенному семейству можно указать на соответствующую аппроксимацию абсолютно непрерывными. Таким образом, интегральная воронка параметризуется присоединенными семействами, а с их помощью из нее удается выбрать одну-единственную траекторию, которая и становится решением, отвечающим данному присоединенному семейству. Другими словами, присоединенное семейство есть не что иное, как способ аппроксимации векторной меры абсолютно непрерывными, или (выражаясь образным, нестрогим языком) есть «схема взаимодействия компонент векторной меры в момент импульса».
Для системы вида (0.3) следует также отметить случай условия Фробениуса, т. е. когда векторные поля gi — столбцы матрицы g — попарно коммутируют: g^g1 = g^gi fi, j. Оказывается, что в таком случае введение присоединенного семейства уже излишне, а интегральная воронка, о которой говорилось выше, вырождается в одну траекторию (см. в [9, 66]).
Более трудным в изучении становится тот случай, когда функция д зависит не только от фазовой переменной, но и от управления и: д = д{х^и) при этом динамическая система имеет вид
Г — f ('r чЛ -I- п (Т оЛо^ 11 С (О 4Л
Легко догадаться, что в этом случае введение дополнительных управлений, действующих на разрывах, нужно даже и тогда, когда условие Фробениуса выполняется. Первая
глава IIосвящена разбору процедуры расширения именно для системы такого общего вида, как (0.4).
Несмотря на растущую сложность процедуры расширения, появление обычного управления и при управляющей мере не является лишь чисто математическим обобщением. А именно, такие системы управления общего вида (0.4) могут оказаться полезными и в инженерных
приложениях, что показывает пример из параграфа 1.2.
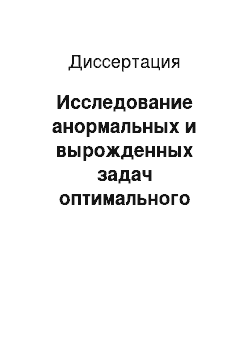
Приведем сейчас упрощенную версию этого примера с целью описать суть явления. Предположим, что имеется управляемый диск вМ2 заданного положительного радиуса, и пусть его движение между двумя заданными точками на плоскости определяется работой четырех ракетных двигателей, как на Рис. 1. При этом мы хотим управлять диском, избегая его вращения. Поэтому линия силы тяги каждого из двигателей должна пересекать центр масс диска, см. Рис. 2. Таким образом, угол наклона каждого из двигателей вг определяется положением центра масс.
В каждый момент времени? мы управляем относительной тягой каждого из двигателей рг = рг (£) > 0, г = 1, 2, 3,4 и скоростью расхода топлива V = г>(£) > 0 (которое общее для всех двигателей). При этом
VI +Р2 +Рз + Р4 = 1.
Рис. 2: Угол в определяется положением центра масс
Поскольку расход топлива уменьшает массу дискат и, значит, влияет на распределение масс, естественно предположить, что положение центра масс диска не фиксировано и является некоторой функцией от т (которую мы не уточняем). Поэтому углы наклона двигателей суть тоже функции массы, т. е. = вг (т). Положим ki (m, p) = pi cos #i (ra) — P2 smd2{m) — p3 cos #з (т) + p4 sin 04(m), k
Уравнения движения диска в поле тяготения Земли имеют вид:
XI = и) Ъ х2 = ги2, кг {т, р)
IV 1 =--V, к2(т, р) ъи2 =--V т = —V.
Здесь, (х1,х2) и (гу^г^г) есть, соответственно, позиция и скорость, т — масса, которая уменьшается со временем из-за расхода топлива, ид- ускорение силы тяжести.
Предположим, что скорость расхода топлива г> сможет принимать неограниченные значения, что, понятно, является некоторой математической идеализацией физического процесса.
Роль нелинейной функции
С (7П, р) = п п кг (т, р) к2{т, р) ' т ' тп ' здесь заключается в том, чтобы убедиться, что диск летит не вращаясь. Ясно, что эта функция может быть устроена весьма сложным образом и уж точно неоднородна.
Поиск управляющего режима, который бы минимизировал функционал
777.(0) = т{ 1) + [ ый на множестве всех допустимых решений указанной динамической системы, приводит нас к формулировке так называемой задачи о минимальном расходе топлива, которая может возникнуть, например, в космическом маневрировании. Решения этой задачи в классе обычных измеримых управлений не существует, но его можно попытаться найти в классе импульсных управлений.
Это обстоятельство указывает на необходимость корректного расширения для нелинейных систем вида (0.4). В параграфе 1.3 будет сформулирована общая задача импульсного управления как результат такого расширения. Как было уже отмечено, в силу нелинейности системы оказывается невозможным корректно пополнить пространство управлений, ограничившись лишь классом борелевских мер. Таким образом, как и в случае д = д (х), импульсное управление становится чем-то большим, чем просто мера. Импульсное управление, получаемое с помощью процедуры пополнения, — это мера плюс присоединенное семейство функций, прикрепленных к атомам меры. Эти дополнительные управляющие функции ведут траекторию системы в тот малый момент, когда происходит импульс. Таким образом расширяется понятие управления. Эта новая концепция управления получила название управления на разрывах системы
Итак, в первой главе мы будем изучать вырожденные ситуации в оптимальном управлении, когда решение х (t) становится разрывным, а управляющая система имеет вид (0.4). Мы расширим понятие задачи оптимального управления, предложив новый тип импульсных управлений и доказав принцип максимума Понтрягина [95] для задачи импульсного управления с ограничениями. Вводимые импульсные управления содержат дополнительные (обычные ограниченные) управления, действующие на разрывах импульсной системы. Такой тип импульсных управлений можно найти в различных инженерных
приложениях, в которых необходимо учитывать быстрые вариации в распределении масс механической системы за тот малый момент времени, когда происходит импульсное воздействие.
Отметим, что важный вклад в исследование импульсных управлений и смежных вопросов внесли (в нашей стране): A.B. Арутюнов, В. И. Гурман, В. А. Дыхта, С. Т. Завалищин, H.H. Красовский, В. Ф. Кротов, A.B. Куржанский, Д. Е. Охоцимский, Б. Т. Поляк, А. Н. Сесекин, А. Г. Ченцов и многие другие. За рубежом это: A. Bressan, D.F. Lawden, F.L. Pereira, F. Rampazzo, R.W. Rishel, G. Silva, R.B. Vinter, J. Warga и другие. По вопросам оптимального импульсного управления существует очень обширная
литература (см. наш библиографический
список, который в данном случае на исчерпывающую полноту не претендует). Отдельно отметим работу [26] как важную для предлагаемого далее исследования.
Ниже, в формулировке нашей задачи также присутствуют так называемые смешанные ограничения. Это ограничения, которые имеют вид R (x, u) Е С, где х — фазовая переменная, и — управление, а С заданное замкнутое множество. Хотя существует большое количество работ по обычным задачам управления со смешанными ограничениями (см., например, [30, 44, 90] и литературу, приведенную там), импульсные задачи со смешанными ограничениями, насколько это известно автору, пока еще не были изучены. Поэтому в главе мы получаем результаты, которые заполняют этот пробел.
Приведем один из результатов главы 1. Это принцип максимума Л. С. Понтрягина в классе импульсных управлений нового типа.
Рассмотрим задачу: f (p) —> min, dx = f (x, и, t) dt + g (x, u, t) dd, t ET, < p = {x0, xi) E S, (0.5)
R (x. u, t) E C,, $ = range (^) С K.
Здесь T = [io.tj — фиксированный отрезок времени- p = (?o,?i), гДе x (to), x = x (t) — S, С — замкнутые множества- К — выпуклый замкнутый конус в Шк- д = (/?, {ит, vT}) — импульсное управление.
Приведем точные определения импульсного управления и решения ж (-), удовлетворяющего дифференциальной связи dx = f (x, u, t)dt + g (x, u, t)d'a, ?ET, x (to) = xq, (0.6) фигурирующей в (0.5). Эти определения отвечают той концепции расширения с управлениями на разрывах, о которой шла речь выше. В классе таких импульсных управлений будут справедливы теоремы существования решения филипповского типа (см.
§ 1.7).
Рассмотрим борелевскую векторную меру /л, принимающую значения в конусе К. Через ц обозначим ее вариацию (напомним, что вариация векторной меры ¡-л — это сумма вариаций всех ее компонент, т. е.
Обозначим через У{ц) множество скалярных неотрицательных бо-релевских мер и таких, что существуют борелевские векторные меры принимающие значения в конусе К, для которых |/^|) А (/л, и). Здесь, А означает сходимость в слабой* топологии, т. е. каждая координата меры ?11 и мера сходятся слабо* в С*(Т). Пусть и Е и т Е Т. Рассмотрим измеримую функцию ут: [0,1] —>¦ К такую, что к
У^ИИ! = 1/(т) П.в.5 Е [0.1] и / Ут^в = (0.7)
Здесь, ?х (т) := /л ({т}) Е К — это значение ¡-х на одноточечном множестве {г}. Семейство вектор-функций {1/7-, г>т}, которое зависит от вещественного параметра т Е Т, назовем присоединенным к векторной мере /л, если существует скалярная борелевская мера^ Е У (ц) такая, что для каждого т выполняются условия (0.7), а вектор-функции ит: [0,1] —> Мт являются измеримыми и существенно ограниченными равномерно по т.
Определение 1.2 Элемент $ = (у, — {иТ, ьТ}) назовем импульсным управлением в задаче (0.5), если ¡-л — это такая борелевская векторная мера, принимающая значения в конусе К, что семейство вектор-функций {иТ, уТ} является присоединенным к ?1.
Возьмем произвольные импульсное управление $ = (д, {ит, г-т}), число т Е Т и вектор, а Е Мп. Обозначим через х (-) = т> а) решение следующей динамической системы (если оно существует) i X (s) = g (x (s), uT (s), r) vT (s), s e [0,1], l x (0) = a.
Функцию ограниченной вариации x (t), заданную на отрезке времени Т, назовем решением дифференциального уравнения (0.6), отвечающим управлению (и, и начальному значению хо, если ж (¿о) =о и для каждого t € (¿о> имеет место: x{t)=xQ+ / f (x, u, s)(k+ / g (x, u, q)dfic +
Jto J[to, t] (0 8) ]Г[хт (1)-хт (0)], где xT (-) := х (-, т, а:(т")) и цс означает непрерывную компоненту меры /?. Заметим, что сумма в (0.8) определена корректно, поскольку, согласно (0.7), существует не более чем счетное множество точек т, где функция vT отлична от нуля.
Такое определение оказывается корректным с точки зрения пополнения задачи, и в его силу можно описать интегральную воронку решений, возникающую при аппроксимации борелевской меры ?1 абсолютно непрерывными мерами (см. лемму 1.1).
Сформулируем принцип максимума. Положим
U{x, t) := {u G Rm: R (x, u, t) eC}.
Рассмотрим функцию Понтрягина
H (x, u, ip, t) := (f (x, и, t), ф), а через Q обозначим следующую вектор-функцию
Q (x. и, ф, t) := д*(х, и, &euro-)ф.
В предположении ограниченности множества U (x, t) и регулярности смешанных ограничений, вводимой в главе 1, а также при довольно общих предположениях относительно функций, входящих в постановку задачи (см. главу 1), получена следующая
Теорема 1.1 Пусть процесс (х, й, ё) является оптимальным в задаче (0.5).
Тогда существуют число, А > 0, вектор-функция с ограниченным изменением ф{£), измеримая вектор-функция г] Е ]Ц (Т), г](1) Е /угс (к (г)) п.в. г, а для каждой точки т Е Оз (|#|) существуют свои собственные, уже абсолютно непрерывная вектор-функция фТ{з) и существенно ограниченная вектор-функция г]Т Е Ц^О, 1]), г) т (з) Е Йс (Кт{8)) п.в.в, определенные на отрезке [0,1], такие, что
Л + ф о, fteT, Л+ Узе [0,1], Уте 08(|^|),
И яй Г Я ф{1) = ф{1 о) — /-Шт — / 75-(<5(*), ¿Ас) + и0 дх У[м дх Jt -^(ФМк + ^ 1М1)-ФгШ, у" € (io.il], геОэО^! у. т<�г в) =т (з)г)т (5),
Фт, ч д /А.. Л.. дВ1. хт (0)=®(г-), фт (0)=ф (т-): з Е [ОД], Уг Е БзСИ), тах Н (и, Ь) = #(?), п.в. Е Т, иеи{г) тах тах (0(и, V) =0 У? Е Т, ек ие|7(4) / тах тах ((?т (и, й), у) =
М*)/ =0, п.в. 5 Е [0,1] У г Е Г>з (|-г5>|), (?(*),<*&) =0 У£ Е Т, (to.il / —<<>(<),?д5С) = о г) В И* (<5г (в), г) г (в)) = -^(5)^(5), гг.е. Й? [0,1], УтеБвСН), где Дас, ДзС естъ абсолютно непрерывная и сингулярная компоненты меры /}с.
Здесь «крышка» над функцией или многозначным отображением от переменных (х, и, ф) означает, что вместо опущенных аргументов подставляются оптимальные значения, а индекс г при функции означает, что подставляются оптимальные значения на разрыве в точке г. Здесь также N5(2/) — нормальный конус Мордуховича, а N5(7/) — его овыпук-ление или нормальный конус Кларка.
Подобного рода принцип максимума, но без смешанных ограничений и при дополнительных предположениях выпуклости векторграм-мы и гладкости, был получен Б. М. Миллером в [88]. Однако автор не привел точного определения импульсного управления, а решение системы (0.6) определил в приближенном смысле на языке сходящихся на Т (и только на Т) последовательностей (определения траектории и управления, данные выше, в работе [88] отсутствуют).
0.2 Принцип максимума Л. С. Понтрягина для задачи оптимального управления с фазовыми ограничениями
В главе 2 изучаются необходимые условия оптимальности в задачах оптимального управления с фазовыми ограничениями в форме Принципа максимума Л. С. Понтрягина [95]. Для задач с фазовыми ограничениями такие условия впервые были получены Р. В. Гамкрелидзе в 1959 году (см. [59, 60]) и затем опубликованы в классической монографии [95]
глава 6). Принцип максимума Р. В. Гамкрелидзе был получен в известных предположениях регулярности оптимальной траектории. Несколько позднее, в 1963 году, А. Я. Дубовицкий и A.A. Милютин доказали для задач с фазовыми ограничениями другой принцип максимума, [64]. Несмотря на то, что он, в отличие от принципа максимума Р. В. Гамкрелидзе, был получен без априорного предположения регулярности траектории, во многих интересных случаях принцип максимума в форме А. Я. Дубовицкого и A.A. Милютина вырождается (см. [40, 44]). Поэтому в последующих работах (см. [40, 41, 63, 42, 44, 50, 28]) были предложены другие варианты этого принципа максимума, которые при дополнительном предположении управляемости траектории уже не вырождаются.
В главе получен принцип максимума в новой форме, являющейся дальнейшим развитием той формы, предложенной Р. В. Гамкрелидзе, но без априорных предположений регулярности оптимальной траектории. Такой принцип максимума получается непосредственно из невы-рождающегося варианта принципа максимума в форме А. Я. Дубовицкого и A.A. Милютина, доказанного A.B. Арутюновым, за счет перехода к новым сопряженным переменным. При этом и условия Р. В. Гамкрелидзе, и условия А. Я. Дубовицкого и A.A. Милютина оказываются несложными следствиями из нового принципа максимума. Раскрывая кратко содержание главы 2, можно сказать, что все известные ранее принципы максимума для задач с фазовыми ограничениями на самом деле оказались тесно связанными друг с другом, и осуществимы переходы от одних условий к другим с помощью специального вида замены сопряженной переменной.
Исследованием задач с фазовыми ограничениями и смежными вопросами занимались (в нашей стране) A.B. Арутюнов, Р. В. Гамкрелидзе, А. Я. Дубовицкий, В. А. Дубовицкий, М. И. Зеликин, A.B. Куржан-ский, A.A. Милютин, В.М. Тихомиров- (за рубежом) М.М.А. Ferreira, F.L. Pereira, R.B. Vinter и многие другие.
Приведем один из результатов главы 2. Это принцип максимума в форме Р. В. Гамкрелидзе без априорных предположений регулярности оптимальной траектории.
Рассмотрим задачу
Ко{р) + / /о (ж, и, t) dt mm, х = f (x, u, t), t e [t0,ti], t0 < ti, < G (x, t) < 0, (U.9)
R (x, u, t) < 0, Ki{p) = 0, K2(p) < 0, k P = {x0,Xi, t0, ti).
Здесь моменты времени ¿о и h априори не предполагаются фиксированными, х — фазовая переменная, принимающая значения в п-мерном арифметическом пространстве Мп, а и 6 Шт — управляющий параметр. В качестве класса допустимых управлений рассматриваются измеримые существенно ограниченные функции и (-).
Пусть (р*, х*, и*) — допустимый процесс в задаче (0.9). Здесь р* = (xq, ¿о> ?i) — Положим Т = [?q, t].
Введем функцию
М (х, и, t) = t) f (x, и, t) + ^(я, t), которую впервые предложил рассматривать Р. В. Гамкрелидзе (в его обозначениях, функция р (х, и), см. [59]).
Рассмотрим расширенную функцию Понтрягина
Н{х, и, ф, ц, А°, t) = (ф, f{x, u, t)) — (/?, М (х, и, t)) — °f0(x, и, ?), и малый лагранжиан
1(р, А) = °К0(р) + (А1, Ki{p)) + (АК2{р)), где, А = (А0, А1, А2).
Определение 2.3 Будем говорить, что процесс (р*, х*, и*) удовлетворяет принципу максимума Понтрягина, если существуют вектор, А = (А0, А1, А2) :A°GR, А1 G А2 Е А0 > О, А2 > О, (А2, К2(р*)) — О, абсолютно непрерывная функция ф: Т —у Мп- функция ¡-л: Т —> M. d (G и измеримая существенно ограниченная функция т Т —У такие, что °, ф, /л одновременно не равны нулю и дН. .. .OR. ф = -—(t) +r (t)—(t) n.e.t.
Ох 4 ' 4 ' ox 4 ' max Н (и. t) = H (t) п.в. t. ueU (t) дН,.. .dR. k = ~dt{t)~r{t)~dt{t) П’вЛ' т) = (-1 ужу> А) — v (t-)—(t*s), s = 1,2, r (t), R (t)) = 0, r (t) > 0 n.e.t, h{t) — max H{u, t). ueU{t)
Кроме того, функция Н абсолютно непрерывна на отрезке Т, а вектор-функция /л удовлетворяет следующим свойствам: а) каждая из функций ¡-л^ постоянна на любом сегменте времени 5 = [51,52], на котором оптимальная траектория целиком лежит во внутренности множества, задаваемого ¿-ым фазовым ограничением, т. е. когда С-7(5) <О V5 Е Б- б) вектор-функция ¡-л непрерывна слева на интервале (¿о^!) и> кроме того, //(??) = 0- в) каждая из функций /лэ (нестрого) монотонно убывает.
При определенных предположениях регулярности и согласованности ограничений, вводимых в главе 2, была получена следующая
Теорема 2.1 Пусть процесс (р*: х*, и*) является оптимальным в задаче (0.9). Предположим, что концевые ограничения в точке р* регулярны, фазовые и смешанные ограничения регулярны и в точке р* фазовые ограничения согласованы с концевыми.
Тогда процесс (р*, х*, и*) удовлетворяет принципу максимума.
0.3 Теория вещественных квадратичных отображений. Условия существования регулярных нулей квадратичных отображений
В главе 3 изучаются вещественные квадратичные отображения и достаточные условия существования их регулярных нулей. Доказывается критерий существования регулярного нуля у квадратичного отображения (это теорема 3.1- она приводится ниже), который изначально был сформулирован A.B. Арутюновым как гипотеза. Теорема 3.1 находит свое применение в теории анормальных задач, где она проливает свет на ту связь, существующую между различными теоремами об обратной функции в окрестности анормальной точки отображения, а это теоремы Е. Р. Авакова и A.B. Арутюнова, см. в [37], [47]. (Эти теоремы будут приведены в следующем параграфе, посвященном этому вопросу- это теоремы 0.1 и 0.2).
Сформулируем главный результат главы 3. Приведем здесь его более простую версию для конечномерных пространств. Пусть задано квадратичное отображение Q: X —> Y, где X = Rn, У = Жк. Иными словами, Q — это набор из к квадратичных форм на X. Вектор х: Q (x) = 0 называется регулярным нулем квадратичного отображения Q, если Q'(x)X = У. Здесь Q'(x) обозначает обычную производную или якобиан отображения Q в точке х.
Введем необходимые обозначения. Для произвольного вектора Л = (Л1,., Л^)? У положим где Qj обозначает ^'-ую координату отображения С}. Через тдд будем обозначать индекс квадратичной формы д. Для целого числа г через Аг обозначим множество таких векторов Л? У, Л ^ 0, что 1пс1 < г.
Введем в рассмотрение условие: А) ЗкеХ: (А, у) < О V Л? где у = (¿[И, Н].
Если = 0, то условие А) считается выполненным автоматически.
Теорема 3.1 Пусть квадратичное отображение С} удовлетворяет условию А). Тогда у него существует регулярный нуль.
Впервые условие А) было введено в работе [47], в которой было доказано (см. лемму 2), что если условие А) выполняется, то квадратичное отображение ф сюръективно (т.е. С2(Х) — У).
При к = 1 утверждение теоремы очевидно. При к = 2 оно относительно несложно доказывается (см. [79]). Усилить утверждение теоремы 3.1 при к > 2, заменив в условии А) множество меньшим множеством нельзя. Это показывает пример квадратичного отображения С^(х) = {хх2, х — х2), действующего из М2 в М2, у которого нет нетривиальных нулей.
Впервые достаточные условия существования регулярного нуля у квадратичного отображения, заключающиеся в том, что Л^-х = 0, были получены в [1]. Затем в [46] было доказано, что если = 0, то множество регулярных нулей всюду плотно во множестве N. Наконец, в [47] был доказан ослабленный вариант теоремы 3.1, а именно, что если Зк? X: (, у) < О VЛ? Л^, где у = (¿[к, к], и конус сопуАг сопу — выпуклая оболочка) при г = к{к + 3) является острым, т. е. не содержит ни одной прямой, то у <3 существует регулярный нуль. Отметим, что если X = Мп, и п к (например, п> 2(к — 2), и (п — к — 1)(п — к) > 2(к — 1)), то последнее предположение является условием общего положения, так как в этом случае множество квадратичных отображений (3, для которых конус сопуЛд-1 является острым, всюду плотно в пространстве всех квадратичных отображений
ТТ1ЧП ТГТ /
ИЗ М.'" в М, — (см. [44],
§-1.у).
Доказательство теоремы 3.1 потребовало определенных усилий и обращения к методам вещественной алгебраической геометрии, [7]. Были использованы такие теоремы и понятия, как полу алгебраическая триангуляция полуалгебраического компакта, леммы об отборе кривых, размерность полуалгебраического множества и т. д.
Теорема 3.1 и разработанный для ее доказательства аппарат играют существенную роль в следующей главе 4 при выводе необходимых условий экстремума. Таким образом, результаты главы 3 имеют как самостоятельный интерес, так и востребованы в качестве вспомогательных лемм в главе 4.
0.4 Исследование гладких отображений в окрестности анормальной точки. Теоремы об обратной функции и необходимые условия экстремума второго порядка
Пусть заданы линейное пространство X, конечномерное евклидово пространство У = М^, отображение Е: X —"¦ У и точка я* Е X. При исследовании отображения Е одним из важнейших вопросов является следующий: при каких условиях нaF для любого у, достаточно близкого к точке у* = Е (х*), уравнение
F (a-) = у имеет решение ф (у): ф (у*) = х*?
Вначале для простоты будем предполагать, что X — банахово пространство. Пусть отображение Р: X —> У непрерывно дифференцируемо в окрестности точки х* Е X. Если точка х* нормальна, т. е. ш1Р'(х*) = У, то ответ дает классическая теорема об обратной функции. А именно, тогда в некоторой окрестности существует такое решение ф (у) искомого уравнения, что ф (у*) = ж* и функция ф непрерывно дифференцируема.
Пусть точка х* анормальна, т. е. ш1Р'(:е*) ф У. Тогда классическая теорема об обратной функции не выполняется. (Например, уравнение F (a-) = х + х — у при х* = 0, у* = 0 имеет решения лишь при у > О, а для уравнения -Р (ж) = х — х = у существует бесконечное число непрерывных функций ф (у), у Е М, каждая из которых дает решение этого уравнения, однако ни одна из этих функций не является даже липшицевой в нуле.)
Приведем теорему об обратной функции, которая справедлива без априорных предположений нормальности точки ж*. Предположим, что отображение .Р дважды непрерывно дифференцируемо в некоторой окрестности точки х*, а его вторая производная удовлетворяет условию Липшица этой окрестности. Введем необходимые понятия.
Определение 0.1 Пусть к Е кегТ'(^), Е (0.10)
Будем говорить, что в точке ж* отображение Т 2-регулярно по направлению Н, если здМег^'Ог*)] + mFx*) = У
Обозначим через Р оператор ортогонального проектирования У на ортогональное дополнение к подпространству тТ7"^*).
Справедлива следующая теорема об обратной функции.
Теорема 0.1 Предположим, что существует h? X, для которого имеет место (0.10) и в точке х* отображение F 2-регулярно по направлению h. Тогда существуют окрестность О точки у*, число с > 0 и определенная на О непрерывная функция ф такие, что для всех у? О имеет место
ПФШ = у, IШ ~ <�с (у- уА +1Р (у — у,)|½) (0.11)
Существование решения искомого уравнения ф (у) для у Е О с указанной оценкой было доказано в [37], а возможность выбора функции ф непрерывной была доказана в [48].
Отметим, что если точка х* нормальна, то предположение теоремы 0.1 выполняется автоматически при h = 0 и, следовательно, теорема 0.1 превращается в классическую теорему об обратной функции. Кроме того, когда X, Y бесконечномерные банаховы пространства, эта теорема была доказана в [37], [48] в предположении, что подпространство imF'(x+) замкнуто и топологически дополняемо. Случай, когда подпространство im F'(x*) не замкнуто, был изучен в [38].
В связи с имеющейся теоремой 0.1 возникает проблема получения достаточных условий существования вектора h, для которого имеет место (0.10), и в точке х* отображение F 2-регулярно по направлению h. Эта проблема была подробно освещена в главе 3, где такое достаточное условие было уже получено, см. теорему 3.1.
Для произвольного целого г > 0 через Лг (х*) обозначим множество всех векторов Л: F'(x*)*Л = 0, |А| = 1, для каждого из которых существует подпространство ПСХ такое, что
1) codim П < г,
2) П С ker F'(x*),
3) (А, .Р"(х*)[?, ?]) > 0 V? е П.
Теорема 0.2 Пусть точка х* анормальна и
3/1 Е кег ^'(х*): (Л, F//(x*)[/l, Н) <0 УАе Л^х*). (0.12)
Тогда существуют конечномерное подпространство М С X, окрестность О точки учисло с > 0 и непрерывная функция ф: О М такие, что для всех у Е О имеет место (0.11).
Это утвеБжление вытекает из теопем 0.1
3.1 и лемм 1. 2 из [471.
V * ¦ А / ' I
Впервые утверждение такого типа было доказано (без использования теорем 0.1 и 3.1) в [47], где в условии (0.12) вместо А^-Дх*) рассматривалось, вообще говоря, большее множество А^(х*), а непрерывность обратной функции ф вообще не рассматривалась. При этом в работе [47] было доказано, что в предположении выполнения вводимого там условия 2-нормальности условие (0.12) необходимо для существования решения ф, удовлетворяющего оценке (0.11).
Итак, если точка х* нормальна, то положительный ответ на вопрос о существовании решения уравнения F (x) = у с линейной оценкой дает классическая теорема об обратной функции. А более общо: если существует направление Н, вдоль которого отображение 2-регулярно в точке х", то решение уравнения Р (х) = у существует в силу теоремы 0.1, и оценка на решение (0.11) является уже линейно-корневой.
Исследование анормальных и вырожденных задач оптимального управления и нелинейного анализа (реферат, курсовая, диплом, контрольная)
1. A.A. Agrachev, A.V. Sarychev. Abnormal sub-Riemannian geodesies: Morse index and rigidity // Ann. 1.st. Henri Poincare. 1996. 13, N 6. p. 635−690.
2. A.V. Arutyunov. Optimality conditions: Abnormal and Degenerate Problems. Mathematics and Its Application. Kluwer Academic Publisher, 2000.
3. A.V. Arutyunov, V. Dykhta, F.L. Pereira. Necessary Conditions for Impulsive Nonlinear Optimal Control Problems without a priori Normality Assumptions, Journal of optimization theory and appl., 2005. V. 124, № 1. pp. 55−77.
4. A.V. Arutyunov, F.L. Pereira. Second-order necessary optimality conditions for problems without a priori normality assumptions. Mathematics of Operations Research, 2006, Vol. 31, № 1, pp. 1−12.
5. A.V. Arutyunov, D.Yu. Karamzin, F.L. Pereira. A nondegenerate Maximum Principle for the impulse control problem with state constraints, SIAM J. Control Optim. Vol. 43 (2005), N 5, pp. 1812−1843.
6. A.V. Arutyunov, D.Yu. Karamzin, F. Pereira. Maximum Principle in Problems with Mixed Constraints under Weakened Assumptions of Regularity, J. of Optimization, Volume 59, Issue 7, October 2010, pp. 1067−1083.
7. J. Bochnak, M. Coste, M.F. Roy. Real Algebraic Geometry. Springer: A Series of Modern Surveys in Mathematics, 1998.
8. J.F. Bonnans, A. Shapiro. Perturbation Analysis of Optimization Problems, Springer-Verlag, New-York, 2000.
9. A. Bressan, F. Rampazzo. Impulsive control systems with commutative vector fields, J. Optim. Theory and Appl., Vol. 71 (1991), pp. 67−83.
10. F.H. Clarke. Optimization and Nonsmooth Analysis, John Wiley and Sons, New York (1983).
11. L.L. Dines. On the mapping of quadratic forms // Bull. Amer. Math. Soc., 47 (1941), pp. 494−498.
12. A.V. Dmitruk. Quadratic order conditions of a local minimum for abnormal extremals // Nonlinear Analysis, Theory, Methods and Applications. 1997, V. 30, № 4, pp. 2439−2448.
13. I. Ekeland. On the Variational Principle, J. Math. Anal. Appl. 47 (1974), pp. 324−353.
14. D. Hilbert. «Mathematical Problems». Bulletin of the American Mathematical Society, vol. 8, no. 10 (1902), pp. 437−479.
15. D. Karamzin. Necessary Conditions of the Minimum in an Impulse Optimal Control Problem // Journal of Mathematical Sciences. Vol. 139, № 6, 2006, pp. 7087−7150.
16. A.B. Kurzhanski, A.N. Daryin. Dynamic Programming for Impulse Controls // Annual Reviews in Control. 2008. V. 32. № 2. pp. 213−227.
17. D.F. Lawden. Optimal Trajectories for Space Navigation, London: Butterworth, 1963.
18. A.A. Milyutin, N.P. Osmolovskii. Calculus of variations and Optimal Control. American Mathematical Society, Providence, RI, 1998.
19. B.S. Mordukhovich. Maximum Principle in Problems of Time Optimal Control with Nonsmooth Constraints, Appl. Math. Mech., 40 (1976), pp. 960−969.'.
20. B.S. Mordukhovich. Existence of optimal controls. J. Soviet Math. 7 (1977), pp. 850−886.
21. B.S. Mordukhovich. Variational Analysis and Generalized Differentiation, Springer, 2005, Vol. 1,2.
22. F.L. Pereira, G.N. Silva. Necessary conditions of optimality for vector-valued impulsive control problems, Systems and Control Letters, Vol. 40, (2000), pp. 205−215.
23. F.L. Pereira, G.N. Silva. Stability for impulsive control systems, Dyn. Syst., Vol. 17, pp. 421−434 (2002).
24. A. Razmadze. Sur les solutions discontinues dans le calcul des variations. Math. Ann. 94 (1925), pp. 1−52.
25. R. Rockafellar, Convex Analysis, Princeton University Press, 1970.
26. R.W. Rishel. An Extended Pontryagin Principle for Control Systems, Whose Control Laws Contains Measures, J. SIAM. Ser. A. Control, 3 (1965), № 2, pp. 191−205.
27. G.N. Silva, R.B. Vinter. Necessary Conditions for Optimal Impulsive Control Problems, SIAM J. Control and Optim, 35, 6 (1997), pp. 1829−1846.
28. R.B. Vinter. Optimal Control. Birkhauser, Boston. 2000.
29. R.B. Vinter, F.L. Pereira. A Maximum Principle for Optimal Processes with Discontinuous Trajectories, SIAM J. Control Optim., 26 (1988), pp. 205−229.
30. R.V. Vinter, M.D.R. de Pinho. Necessary conditions for optimal control problems involving nonlinear differential algebraic equations, J. Math. Anal. Appl., 212 (1997), pp. 493−516.
31. R.B. Vinter, M.M.A. Ferreira. When is the maximum principle for state constrained problems nondegenerate? // J. Math. Anal, and Appl. 1994. V. 187. pp. 438−467.
32. J. Warga. Optimal Control of Differential and Functional Equations. Academic Press, New-York and London, 1972.
33. Аграчев A.A. Топология квадратичных отображений и гессианы гладких отображений, Итоги науки и техн. Сер. Алгебра. Топол. Геом., 26, ВИНИТИ, М., 1988, с. 85−124.
34. Аграчев A.A. Гомологии пересечений вещественных квадрик, Докл. АН СССР, 299:5 (1988), с. 1033−1036.
35. Аграчев A.A., Сачков Ю. Л. Геометрическая теория управления, М.: Физмат-лит, 2005.
36. Аваков Е. Р. Условия экстремума для гладких задач с ограничениями типа равенств, Ж. вычисл. матем. и матем. физ., 25:5 (1985), с. 680−693.
37. Аваков Е. Р. Теоремы об оценках в окрестности вырожденной точки. Мат. заметки, 47, 1990, с. 3−13.
38. Аваков Е. Р., Арутюнов A.B. Теорема об обратной функции и условия экстремума для анормальных задач с незамкнутым образом, Матем. сб., 196:9 (2005), 3−22.
39. Алексеев В. М., Тихомиров В. М., Фомин C.B. Оптимальное управление. М.: Наука, 1979.
40. Арутюнов A.B., Тынянский Н. Т. О принципе максимума в задаче с фазовыми ограничениями. Изв. АН СССР. Сер. техн. кибернетика, 1984, № 4, с. 60−68.
41. Арутюнов A.B. К необходимым условиям оптимальности в задаче с фазовыми ограничениями. Докл. АН СССР, 1985, Т. 280, N 5, с. 1033−1037.
42. Арутюнов A.B. К теории принципа максимума в задачах оптимального управления с фазовыми ограничениями. Докл. АН СССР, 1989, Т. 304? N 1, с. 11−14.
43. Арутюнов A.B. Возмущения экстремальных задач с ограничениями и необходимые условия оптимальности. Итоги науки и техники. ВИНИТИ. Математический анализ, 1989, Т. 27, с. 147−235.
44. Арутюнов A.B. Условия экстремума. Анормальные и вырожденные задачи, М.: Факториал, 1997.
45. Арутюнов A.B. Расширения и возмущения задач оптимального управления. Тр. МИАН, 1998, Т. 220, с. 27−34.
46. Арутюнов A.B. Некоторые свойства квадратичных отображений. Вестник МГУ, сер. 15, ВМиК, 1999, № 2, с. 30−32.
47. Арутюнов A.B. Теорема о неявной функции как реализация принципа Лагранжа. Анормальные точки, Матем. сб., 191:1 (2000), с. 3−26.
48. Арутюнов A.B. Теорема о неявной функции без априорных предположений нормальности. ЖВМиМФ, 46, № 2, 2006, с. 205−215.
49. Арутюнов A.B. Неотрицательность квадратичных форм на пересечении квадрик и квадратичные отображения. Математические заметки, Т. 84, выпуск 2, с. 163−174, (2008).
50. Арутюнов A.B., Черникова Н. Ю. Об управляемости траекторий в задачах оптимального управления с фазовыми ограничениями. Итоги науки и техники. Современная математика и ее приложения. Т. 64. М., ВИНИТИ, с. 49−56. 1999.
51. Арутюнов A.B., Ячимович В. К теории экстремума для анормальных задач, Вестн. МГУ. Сер. Вычисл. матем. и кибернетика. 2000. № 1. с. 34−40.
52. Арутюнов A.B., Верещагина Ю. С. О необходимых условиях второго порядка в задачах оптимального управления // Дифференц. уравнения. 2002. Т. 38. № 11. с. 1443−1450.
53. Арутюнов A.B., Карамзин Д. Ю. Необходимые условия минимума в задаче оптимального импульсного управления. Нелинейная динамика и управление. Вып. 4. Сб. статей под редакцией C.B. Емельянова, С. К. Коровина. М.: Физматлит, 2004, с. 205−240.
54. Арутюнов A.B., Карамзин Д. Ю. Необходимые условия экстремума в анормальной экстремальной задаче с ограничениями типа равенств. ЖВМиМФ. Т. 46, № 8, 2006, с. 1363−1368.
55. Арутюнов A.B., Жуковский С. Е. Существование обратных отображений и их свойства. Дифференциальные уравнения и топология. II, Сборник статей. К 100-летию со дня рождения академика Льва Семеновича Понтрягина, Тр. МИАН, 271, МАИК, М., 2010, с. 18−28.
56. Благодатских В. И., Филиппов А. Ф. Дифференциальные включения и оптимальное управление. Топология, обыкновенные дифференциальные уравнения, динамические системы, Сборник обзорных статей. 2. К 50-летию института, Тр. МИАН СССР, 169, 1985, с. 194−252.
57. Борисович Ю. Г., Гельман Б. Д., Мышкис А. Д., Обуховский В. В.
Введение
в теорию многозначных отображений. Воронеж, 1986.
58. Васильев Ф. П. Численные методы решения экстремальных задач. М.: Наука, 1980.
59. Гамкрелидзе Р. В. Оптимальные по быстродействию процессы при ограниченных фазовых координатах. Докл. АН СССР, 1959, Т. 125, № 3, с. 475−478.
60. Гамкрелидзе Р. В. Оптимальные процессы управления при ограниченных фазовых координатах. Изв. АН СССР, 1960, Т. 24, № 3, с. 315−356.
61. Гамкрелидзе Р. В. Основы оптимального управления. Тбилиси: Изд-во 'Гбил. ун-та, 1977.
62. Гусев М. И. Об оптимальном управлении обобщенными процессами при невыпуклых фазовых ограничениях //В кн.: Дифференциальные игры и задачи управления, Свердловск: УНЦ АН СССР, 1975.
63. Дубовицкий А. Я., Дубовицкий В. А. Необходимые условия сильного минимума в задачах оптимального управления с вырождением концевых и фазовых ограничений. УМН, 1985, Т. 40, № 2, с. 175−176.
64. Дубовицкий А. Я., Милютин A.A. Задачи на экстремум при наличии ограничений. Докл. АН СССР, 1963, Т. 149, № 4, с. 759−762.
65. Дубовицкий А. Я., Милютин A.A. Вторые вариации в задачах на экстремум с ограничениями. Докл. АН СССР. Т. 160. № 1. 1965. рр. 18−21.
66. Дыхта В. А., Самсонюк O.H. Оптимальное импульсное управление с приложениями. М.: Физматлит, 2000.
67. Завалищин С. Т., Сесекин A.H. Импульсные процессы: модели и приложения. М.: Наука, 1991.
68. Зеликин М. И. Оптимальное управление и вариационное исчисление, УРСС, Москва, 2004.
69. Измаилов А. Ф. К условиям оптимальности в экстремальных задачах с нерегулярными ограничениями-неравенствами. Матем. заметки. 1999. Т. 66. Вып. 1. с. 89−102.
70. Измаилов А. Ф. Теоремы о представлении семейств нелинейных отображений и теоремы о неявной функции. Матем. заметки, 2000, 67, 1, с. 57−68.
71. Измаилов А. Ф., Солодов М. В. Численные методы оптимизации. М.: Физматлит, 2003.
72. Измаилов А. Ф. Чувствительность в оптимизации. М.: Физматлит, 2006.
73. Измаилов А. Ф. Чувствительность решений систем условий оптимальности при нарушении условий регулярности ограничений. Ж. вычисл. матем. и матем. физ., 47:4 (2007), с. 555−577.
74. Иоффе А. Д., Тихомиров В. М. Теория экстремальных задач. М: Наука, 1974.
75. Иоффе А. Д., Тихомиров В. М. Несколько замечаний о вариационных принципах. Мат. заметки, 1997, Т.61, N 2, с. 305−311.
76. Канторович Л. В., Акилов Г. П. Функциональный анализ. М.: Наука, 1984.
77. Карамзин Д. Ю. Необходимые условия оптимальности в различных классах экстремальных задач управления. Дисс. к.ф.-м.н., ВМиК МГУ, 2003.
78. Карамзин Д. Ю. К необходимым условиям экстремума в анормальных задачах с ограничениями типа равенств и неравенств. В сб. ВЦ РАН «Вопросы моделирования и анализа в задачах принятия решений 2004, с. 88−99.
79. Карамзин Д. Ю. Исследование достаточных условий существования регулярного нуля у квадратичных отображений. Итоги науки. ЮФО. Математический форум. Т. 2. Исследования по выпуклому анализу. Владикавказ, 2009, с. 84−97.
80. Кириллов A.A., Гвишиани А. Д. Теоремы и задачи функционального анализа. М.: Наука, 1988.
81. Колмогоров А. Н., Фомин С. В. Элементы теории функций и функционального анализа. М.: Наука, 1968.
82. Красовский H.H. Теория управления движением. М.: Наука, 1968.
83. Куржанский А. Б. Оптимальные системы с импульсными управлениями //В кн.: Дифференциальные игры и задачи управления. Свердловск: УНЦ АН СССР, 1975. с. 131−156.
84. Куржанский А. Б. Управление и наблюдение в условиях неопределенности. М.: Наука, 1977.
85. Куржанский А. Б., Осипов Ю. С. К управлению линейной системой обобщенными воздействиями, Дифференц. уравнения. 1969. Т. 5, № 8, с. 1360−1370.
86. Левитин Е. С., Милютин A.A., Осмоловский Н. П. Об условиях локального минмимума в задачах с ограничениями. Математическая экономика и функциональный анализ. М.: Наука. 1974. С. 139−202.
87. Магарил-Ильяев Г. Г., Тихомиров В. М. Выпуклый анализ и его приложения. М.: УРСС, 2011.
88. Миллер Б. М. Условия оптимальности в задачах обобщенного управления. Автоматика и телемеханика, 1992, № 5, с. 50−58.
89. Милютин A.A. О квадратичных условиях экстремума в гладких задачах с конечномерным образом. Методы теории экстремальных задач в экономике. М.: Наука. 1981. рр. 138−177.
90. Милютин A.A. Принцип максимума в общей задаче оптимального управления. М: Физматлит, 2001.
91. Натансон И. П. Теория функций вещественной переменной. М.: Наука, 1974.
92. Осмоловский Н. П. Необходимые и достаточные условия высшего порядка для понтрягинского и ограниченно-сильного минимумов в задаче оптимального управления. Докл. АН СССР. 1988. Т. 303. № 5. с. 1052−1056.
93. Охоцимский Д. Е. К теории движения ракет. Прикладная математика и механика, Т. 10, вып. 2, 1946, с. 251−272.
94. Поляк Б. Т.
Введение
в оптимизацию. М.: Наука, 1983.
95. Понтрягин Л. С., Болтянский В. Г., Гамкрелидзе Р. В., Мищенко Е. Ф. Математическая теория оптимальных процессов. М.: Наука, 1983.
96. Рудин У. Функциональный анализ. М.: Мир, 1975.
97. Тихомиров В. М. Принцип Лагранжа и задачи оптимального управления. Изд-во МГУ, 1982.
98. Филиппов А. Ф. О некоторых вопросах оптимального регулирования. Вестн. МГУ. Математика и механика, 1959, № 2, с. 25−38.
99. Филиппов А. Ф. Дифференциальные уравнения с разрывной правой частью. Мат. сб., 1966. Т. 51, № 2, с. 100−128.
100. Хирш М. Дифференциальная топология. М.: Наука, 1979.
101. Ченцов А. Г. Конечно-аддитивные меры и релаксации экстремальных задач. Наука, Екатеринбург, 1993. Публикации автора по теме диссертацииреферируемые журналы).
102. A.B. Арутюнов, Д. Ю. Карамзин. Расширение и возмущение задачи оптимального управления с фазовыми ограничениями. Вестник МГУ. Сер. 15, ВМиК, № 2, 2002, с. 31−35.
103. Д. Ю. Карамзин. К теории принципа максимума в задачах с фазовыми ограничениями. Вестник МГУ. Сер. 15, ВМиК, № 4, 2002, с. 23−31.
104. A.B. Арутюнов, В. Н. Бурков, А. Ю. Заложнев, Д. Ю. Карамзин. Задача оптимального распределения ресурсов по множеству независимых операций. Автоматика и телемеханика, № 5, 2002, с. 108−119.
105. A.B. Арутюнов, Д. Ю. Карамзин. Необходимые условия минимума в задаче оптимального импульсного управления. Нелинейная динамика и управление. Вып. 4. Сб. статей под редакцией C.B. Емельянова, С. К. Коровина. М.: Физ-матлит, 2004, с. 205−240.
106. A.V. Arutyunov, D.Yu. Karamzin, F. L Pereira. A nondegenerate Maximum Principle for the impulse control problem with state constraints. SIAM J. Control Optim. Vol. 43, № 5, 2005, p. 1812−1843.
107. A.B. Арутюнов, Д. Ю. Карамзин. Необходимые условия слабого минимума в задаче оптимального управления со смешанными ограничениями. Дифференциальные уравнения. Т. 41, № 11, 2005, с. 1458−1468.
108. A.B. Арутюнов, Д. Ю. Карамзин. Необходимые условия экстремума в анормальной экстремальной задаче с ограничениями типа равенств. Журнал вычислительной математики и математической физики. Т. 46, № 8, 2006, с. 1363−1368.
109. Д. Ю. Карамзин. К теории необходимых условий экстремума для конечномерных задач при наличии неравенств. Журнал вычислительной математики и математической физики. Т. 46, № 11, 2006, с. 1950;1961.
110. Д. Ю. Карамзин. Принцип максимума в задаче управления при ограниченных фазовых координатах. Автоматика и телемеханика, № 2, 2007, с. 26−38.
111. A.B. Арутюнов, Д. Ю. Карамзин. Необходимые условия минимума в анормальных задачах с геометрическими ограничениями. Журнал вычислительной математики и математической физики. Т. 47, № 3, 2007, с. 364−375.
112. Д. Ю. Карамзин. Необходимые условия экстремума в задаче управления с фазовыми ограничениями. Журнал вычислительной математики и математической физики. Т. 47, № 7, 2007, с. 1123−1150.
113. A.V. Arutyunov, D.Yu. Karamzin, F.L. Pereira. Necessary Conditions of Opti-mality for Problems with Equality and Inequality Constraints: The Abnormal Case. J. Optim. Theory Appl. (2009) 140: 391−408.
114. Д. Ю. Карамзин. Исследование достаточных условий существования регулярного нуля у квадратичных отображений. Математический форум. Т. 2. Исследования по выпуклому анализу. Владикавказ: ЮМИ ВНЦ РАН, 2009, с. 84−97. (Итоги науки. ЮФО).
115. A.V. Arutyunov, D.Yu. Karamzin, F.L. Pereira. Maximum principle in problems with mixed constraints under weak assumptions of regularity. Optimization. Vol. 59, № 7, October 2010, pp. 1067−1083.
116. A.B. Арутюнов, Д. Ю. Карамзин, Ф. Перейра. Принцип максимума JI.C. Понт-рягина для задач оптимального импульсного управления. Доклады Академии наук, 2010, том 432, № 4, с. 439−442.
117. A.V. Arutyunov, D.Yu. Karamzin, F.L. Pereira. On a generalization of the impulsive control concept: controlling system jumps. Discrete and Continuous Dynamical Systems, Vol. 29, № 2, February 2011, pp. 403−415.
118. A.B. Арутюнов, Д. Ю. Карамзин. Регулярные нули квадратичных отображений и их приложение. Математический сборник, том 202, № 6, 2011, с. 3−28.
119. A.V. Arutyunov, D.Yu. Karamzin, F.L. Pereira. The Maximum Principle for Optimal Control Problems with State Constraints by R.V. Gamkrelidze: Revisited. J. Optim. Theory Appl. (2011) 149: pp. 474−493.
120. A.V. Arutyunov, D.Yu. Karamzin, F.L. Pereira. Pontryagin’s maximum principle for constrained impulsive control problems. Nonlinear Analysis, Theory, Methods and Applications. Vol. 75, № 3, February 2012, pp. 1045−1057.
121. E.P. Аваков, A.B. Арутюнов, Д. Ю. Карамзин. Обратная функция в окрестности анормальной точки гладкого отображения. Доклады Академии наук, 2012, том 444, № 1, с. 7−10.
122. Международная конференция «Теория управления и теория обобщенных решений уравнений Гамильтона-Якоби». Екатеринбург, 22−26 июня, 2005.
123. Международная конференция «Тихонов и современная математика», Москва, 19−25 июня, 2006.
124. XVI всероссийская конференция «Теоретические основы и конструирование численных алгоритмов и решение задач математической физики с приложением к многопроцессорным системам», Абрау-Дюрсо, 2006.
125. International Conference «Computer Algebra in Scientific Computing 2006» (CASC-2006), Chisinau, Moldova, September 11−15, 2006.
126. International Conference «Extremal Problems in Complex and Real Analysis» (EPCaRA-2007), Moscow, May 21−25, 2007.
127. IX Международная Четаевская конференция «Аналитическая механика, устойчивость и управление движением». Иркутск, 12−16 июня, 2007.
128. International Conference «Differential Equations and Topology» dedicated to the 100th Anniversary of the birthday of L.S. Pontryagin, Moscow, Russia, June 17−22, 2008.
129. The 8th Portuguese Conference on Automatic Control (CONTROLO-2008), Vila Real, Portugal, July 21−23, 2008.
130. Workshop on Control, Nonsmooth Analysis and Optimization in honour of F. Clarke and R. Vinter on the occasion of their 60th birthday. Porto, Portugal, May 4−8, 2009.
131. The 23rd European Conference on Operational Research. Bonn, Germany, July 5−8, 2009.
132. International Conference «Control and Optimization of Dynamical SystemsCODS-2009», Tashkent, Uzbekistan, September 28−30, 2009.
133. The 24th European Conference on Operational Research, Lisbon, Portugal, July 11−14, 2010.
134. VI Московская международная конференция по исследованию операций, 1923 октября, 2010.
135. The 6th International Workshop Computer Algebra Systems in Teaching and Research (CASTR-2011), Siedlce, Poland, February 2−6, 2011.
136. Workshop «0ptimization-2011», Costa da Caparica, Portugal, July 24−27, 2011.
137. The 8th International ISAAC Congress, Moscow, 22−27 August, 2011.