Субоптимальные системы.
Теория автоматического регулирования
Из начальных условий Х2(0) изображающая точка системы будет попадать в точку пересечения идеальной и реальной линии переключения и к началу координат будет двигаться, но соответствующему участку идеальной линии переключений, т. е. по оптимальной траектории. При движении из Х3(0) изображающая точка системы будет доходить до Sp (x), переключаться на траекторию, соответствующую другому знаку… Читать ещё >
Субоптимальные системы. Теория автоматического регулирования (реферат, курсовая, диплом, контрольная)
Субоптималъными будем называть системы, которые близки по свойствам к оптимальным с заданной точностью. Точность приближения к оптимальной системе определяется соотношением 
где J' — критерий, соответствующий субоптимальной системе.
Такую систему получают в результате аппроксимации оптимального закона управления либо в результате искусственного ограничения рабочей области пространства состояний.
Рассмотрим оптимальный закон управления.

Рис. 12.11. Определение линии переключений к примеру 12.6.
Теперь изменим направление движений на противоположное, т. е. вернемся к обычному времени (рис. 12.12).

Рис. 12.12. Оптимальные траектории движения из различных начальных условий к примеру 12.6.

Поверхность переключения сложной конфигурации можно представить в виде совокупности функций.

аппроксимировать, например

или каким-либо другим способом. При этом будут получаться субоптимальные системы, с различной степенью точности близкие к оптимальным. Обсудим особенности субоптимальных систем на примере.
Пример 12.7. Рассмотрим оптимальную, но быстродействию систему (см. пример 12.6) и аппроксимируем линию переключения прямой (рис. 12.13).

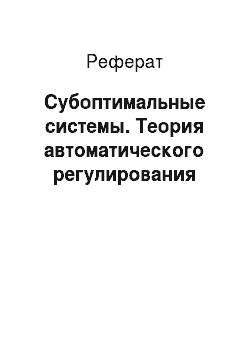
Рис. 12.13. Фазовый портрет субоптимальной системы.
Уравнение реальной линии переключения имеет вид.

Процессы в субоптимальной системе будут существенно зависеть от начальных условий. Так, при движении из X,(0) изображающая точка системы попадает на реальную линию переключений Sp(x), а затем движется вдоль нее в скользящем режиме.
Из начальных условий Х2(0) изображающая точка системы будет попадать в точку пересечения идеальной и реальной линии переключения и к началу координат будет двигаться, но соответствующему участку идеальной линии переключений, т. е. по оптимальной траектории.
При движении из Х3(0) изображающая точка системы будет доходить до Sp(x), переключаться на траекторию, соответствующую другому знаку управления, вновь попадать на реальную линию переключений и двигаться вдоль нее в скользящем режиме.
Таким образом, в субоптималыюй системе могут быть строго оптимальные процессы, если из начальных условий изображающая точка системы по фазовой траектории попадает в точку пересечения идеальной и реальной линий переключения.