Соединение звеньев.
Структурные схемы систем автоматического регулирования
При последовательном соединении звеньев выходная величина предыдущего звена является входной величиной последующего. Допустим, имеется участок САР, состоящий из трех последовательно включенных звеньев (рис. 3.11, а), динамические свойства которых представлены передаточными функциями И^(р), У2(р), (р). Передаточная функция всего участка с последовательно соединенными звеньями равна произведению… Читать ещё >
Соединение звеньев. Структурные схемы систем автоматического регулирования (реферат, курсовая, диплом, контрольная)
При проектировании и расчете САР их изображают в виде структурных схем.
Структурной схемой называют схему САР, составленную из типовых динамических звеньев. Структурную схему разрабатывают на основании функциональной схемы; каждый элемент функциональной схемы заменяют одним или несколькими типовыми динамическими звеньями, соединенными определенным образом. Графическое изображение структурной схемы аналогично изображению функциональной схемы; типовые звенья обозначают прямоугольниками, внутри которых обычно записывается передаточная функция звена, связь между звеньями показывают стрелками, направление которых соответствует направлению передачи сигнала. Звенья в структурной схеме САР могут соединяться последовательно и параллельно.
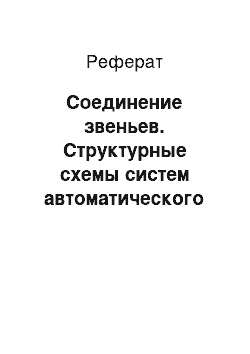
При последовательном соединении звеньев выходная величина предыдущего звена является входной величиной последующего. Допустим, имеется участок САР, состоящий из трех последовательно включенных звеньев (рис. 3.11, а), динамические свойства которых представлены передаточными функциями И^(р), У2(р), (р). Передаточная функция всего участка с последовательно соединенными звеньями равна произведению передаточных функций отдельных звеньев.

Выразив передаточные функции через соответствующие отношения изображений входных и выходных величин для каждого звена, можно определить общий коэффициент передачи (усиления) для системы, состоящей из последовательно соединенных звеньев: он будет равен произведению коэффициентов передачи отдельных звеньев: 

Рис. 3.11. Схемы соединения звеньев САР
Параллельное соединение звеньев может быть согласно-параллельным и встречно-параллельным.
При согласно-параллельном соединении направление передачи сигналов во всех звеньях совпадает (прямая связь), т. е. входная величина одновременно подается на входы всех звеньев, а выходная величина равна сумме выходных величин отдельных звеньев. На рис. 3.11, 6 представлен участок, состоящий из трех параллельно-соединенных звеньев, динамические свойства которых представлены передаточными функциями Ух(р), У2(р), Щ (Р)' Передаточная функция участка, состоящего из согласно-параллельных звеньев, равна сумме передаточных функций отдельных звеньев.

Как и в первом случае, произведя соответствующую подстановку, можно получить общий коэффициент передачи рассматриваемого участка. Коэффициент передачи участка или системы, состоящей из согласно-параллельны х звеньев, равен сумме коэффициентов передачи отдельных звеньев.

При встречно-параллельном соединении звеньев направление передачи сигналов встречное (обратная связь), при этом на вход основного звена одновременно с входной величиной подается его выходная величина, прошедшая через звено обратной связи с его передаточной функцией ?ос (рис. 3.11, в). Рассматриваемая система является замкнутой, передаточная функция ее обозначается символом Ф (/?) и имеет вид.

В случае, когда передаточная функция обратной связи равна единице М’осО^) = 1 (рис. 3.11, г), выражение (3.50) приобретает вид.

Такая обратная связь называется единичной обратной связью. В выражениях (3.50) и (3.51) в случае отрицательной обратной связи в знаменателе будет знак плюс, при положительной обратной связи — знак минус.
Если воздействие обратной связи совпадает с основным воздействием, то такая связь называется положительной. Если воздействие обратной связи противоположно основному воздействию, такая связь называется отрицательной. Ранее уже говорилось, что воздействие регулятора на объект в замкнутой системе регулирования реализует главную обратную (отрицательную) связь системы.
Если обратная связь действует только в переходном процессе, ее называют гибкой; если как в переходном, так и в установившемся состоянии — жесткой.