Управление судном при передаче грузов в море траверзным способом
Довольно широкий круг вопросов в области расчета, проектирования и использования судовых канатных дорог, математического описания движения и гидродинамики судна в различных условиях плавания рассмотрен в множестве работ отечественных и зарубежных ученых, таких как Н. И. Махорин, К. М. Барамидзе, И. А. Горшков, А. В. Бачище, А. Е. Маслов, А. М. Басин, В. А. Логиновский, Ю. М. Мастушкин, Р. Я… Читать ещё >
Содержание
- Условные обозначения
- 0. 1. Техническая сущность и актуальность вопроса передачи грузов в море
- 0. 2. Общая направленность исследований. Цель работы
- 0. 3. Краткое содержание работы
- I. АНАЛИЗ СПОСОБОВ И УСТРОЙСТВ ПЕРЕДАЧИ ГРУЗОВ В МОРЕ
- 1. 1. Общие положения
- 1. 2. Условия работы судовых грузопередающих устройств
- 1. 3. Основные требования, предъявляемые к грузовым устройствам со следящим приводом
- 1. 4. Устройства для передачи грузов бесконтактным кильватерным способом
- 1. 5. Устройства для передачи грузов траверзным способом
- 1. 6. Выводы по главе
- II. АНАЛИЗ УСИЛИЙ В КАНАТАХ ПОДВЕСНОЙ ДОРОГИ ПРИ ПЕРЕДАЧЕ ГРУЗОВ В МОРСКИХ УСЛОВИЯХ
- 2. 1. Общие положения
- 2. 2. Статический расчет силовых параметров подвесной канатной дороги
- 2. 3. Анализ траектории движения передаваемого груза
- 2. 4. К расчету суммарных амплитуд колебаний точек подвеса канатной дороги
- 2. 5. Динамика усилий в канатах межсудовой канатной дороги
- 2. 6. Выводы по главе
- III. МАТЕМАТИЧЕСКАЯ МОДЕЛЬ ДВИЖЕНИЯ СУДНА ПРИ ТРАВЕРЗНОМ СПОСОБЕ ПЕРЕДАЧИ ГРУЗА
- 3. 1. Анализ математических моделей движения судна
- 3. 2. Силы, действующие на корпус судна
- 3. 3. Силы, действующие на рулевое устройство
- 3. 4. Учет гидрометеорологических сил
- 3. 5. Учет сил гидродинамического взаимодействия между судами
- 3. 6. Влияние канатной дороги на управляемость судна
- 3. 7. Обобщенная математическая модель
- 3. 8. Выводы по главе
- IV. АНАЛИЗ УПРАВЛЯЕМОСТИ СУДОВ ПРИ ТРАВЕРЗНОМ СПОСОБЕ ПЕРЕДАЧИ ГРУЗА НА БАЗЕ ОБОБЩЕННОЙ МАТЕМАТИЧЕСКОЙ МОДЕЛИ
- 4. 1. Управление судном при подходе
- 4. 2. Управление судном при передаче. Расчет угла перекладки руля и угла дрейфа
- 4. 3. Управление судном при отходе
- 4. 4. Рекомендации по управлению судном при параллельном движении на малых траверзных расстояниях
- 4. 5. Анализ экспериментальных данных
- 4. 6. Оценка остойчивости судна при передаче груза траверзным способом
- 4. 7. Автоматизированная система управления судном по поперечному смещению при траверзном способе передачи грузов
- 4. 8. Выводы по главе
Управление судном при передаче грузов в море траверзным способом (реферат, курсовая, диплом, контрольная)
0.1. Техническая сущность и актуальность вопроса передачи грузов в море.
Швартовные и грузовые операции в открытом море из-за незащищенности судов от воздействия волнения, ветра и течений являются в морской практике особо сложными и относятся к категории неизбежного производственно-хозяйственного риска. [40].
В настоящее время погрузочно-разгрузочные операции в море проводятся, в основном, контактным способом. Для уменьшения влияния волнения ошвартованные суда применяют кранцевую защиту и швартовы с амморти-зирующими устройствами. [41 ].
Применяемые в качестве грузовых устройств судовые краны и стрелы с обычными лебедками без следящего устройства не обеспечивают сохранности груза и безопасности людей, поэтому в условиях повышенного волнения (более трех баллов) грузовые операции, как правило, прекращаются. [40].
Для обеспечения безударного опускания груза на палубу применяют палубные краны со следящим устройством, качающимися стреловыми системами, гибкие эстакадные трапы, амортизирующие устройства и стабилизирующие лебедки, которые позволяют проводить грузовые операции контактным способом при наличии волнения.
Отдельные конструктивные усовершенствования, попытки внедрения которых на судах снабжения и обеспечения пока еще предпринимаются, направлены в основном на решение проблемы обеспечения безопасности перегрузочных операций. При этом достигнут определенный прогресс благодаря внедрению на судах грузовых устройств, способных отслеживать колебания взаимодействующих судов и компенсировать динамические нагрузки, которые возникают в элементах устройств при качке, а также систем автоматизированного управления грузовыми стреловыми устройствами [46]. Однако эти решения не уменьшили риск навала судов как при швартовке, так и при проведении грузопередачи.
Швартовка крупнотоннажных судов друг к другу в открытом море очень сложна, а в некоторых случаях невозможна. Огромная кинетическая энергия судов делает опасным момент их касания даже при небольшой относительной скорости движения.
В условиях, когда из-за волнения и ветра суда не могут осуществлять грузовые операции ошвартованными друг к другу, применяют бесконтактные способы, при которых принимающее и передающее груз суда находятся на некотором безопасном расстоянии одно от другого.
В последнее десятилетие проблема производства грузовых операций в открытом море стала особенно актуальной. Объясняется это, в первую очередь, значительным развитием флота крупнейших морских держав мира, связанных с обеспечением, как коммерческих задач, так и освоением мирового океана с целью добычи полезных ископаемых.
В связи с этим возникла насущная необходимость создания специальных судов обеспечения, оснащенных мощными и совершенными грузовыми устройствами, способными осуществлять передачу грузов в море с судна снабжения на другие суда, а также на необорудованный берег и прочие стационарные и плавучие объекты.
Быстро растущее потребление нефти и газа усилило внимание к их добыче не только на суше, но и в морях и океанах. Для обслуживания и ремонта морских стационарных платформ необходимы специальные суда, оборудованные устройствами для передачи людей и грузов на указанные объекты, а также способные производить грузовые операции при значительном волнении моря.
Военно-морские силы стран НАТО применяют передачу на ходу топлива и снабжения еще с середины прошлого века. На кораблях российских ВМС первые испытания ПКД проводились в 80-х годах прошлого века. В последние годы тренировки по передаче грузов на ходу отрабатывались в ходе совместных учений ВМФ России и кораблей стран НАТО («Active Endevour» -2006, «BlackSeaFor» — 2006).
Несмотря на сложность операции передачи грузов на ходу, она имеет ряд существенных преимуществ. Корабли не останавливаются, а продолжают движение, что дает выигрыш во времени. Организовать якорную стоянку не всегда позволяют глубины, а передача в дрейфе более опасна, чем на ходу. В условиях повышенного волнения движущиеся корабли более устойчивы. Кроме того, корабль на ходу более маневрен и обладает достаточной боеготовностью.
По оценке военно-морских специалистов [41] материально-техническое снабжение кораблей в море на ходу эквивалентно увеличению числа боевых единиц в соединении.
Суда рыбопромыслового флота ведут промысел в удаленных районах мирового океана. Эффективность такой добычи в значительной степени зависит от решения проблемы передачи грузов в море, поскольку экономически целесообразнее, чтобы промысловые суда получали снабжение и сдавали улов непосредственно в районе промысла на транспортные суда или плавбазы.
По мнению отечественных и зарубежных специалистов [41,47] возможности контактного способа передачи грузов в открытом море в значительной мере исчерпаны.
Использование бесконтактных способов исключает швартовые операции на ходу, дает возможность избежать повреждений корпусов и устройств судов, создает возможность использовать переходы, позволяет выполнять передачу грузов, а при необходимости и людей, при повышенном волнении моря, что существенно улучшает эксплуатационные показатели работы судов различного назначения.
Из вышесказанного следует, что вопрос передачи грузов в море бесконтактным способом, и особенно при повышенном волнении, актуален и требует своего разрешения.
0.2 Общая направленность исследований. Цель работы.
Техническая эксплуатация судовых грузопередающих устройств совместно с задачами управления судами при траверзном способе передачи грузов представляет собой комплексную проблему, включающую решение большого числа разнообразных по характеру задач.
Главные задачи связаны с обоснованием основных характеристик следященатяжного устройства, а также оценка управляемости и остойчивости судов в специфических условиях, обеспечивая производительность, надежность и безопасность грузопередачи в открытом море.
Довольно широкий круг вопросов в области расчета, проектирования и использования судовых канатных дорог, математического описания движения и гидродинамики судна в различных условиях плавания рассмотрен в множестве работ отечественных и зарубежных ученых, таких как Н. И. Махорин, К. М. Барамидзе, И. А. Горшков, А. В. Бачище, А. Е. Маслов, А. М. Басин, В. А. Логиновский, Ю. М. Мастушкин, Р. Я. Першиц, Г. В. Соболев, М. АЬкошкг, ЬБапс!, К-Иоток), М1ЧоггЫп, К. Куипа, K. McTaggart, КМсв^ог, Р. КтЬпапкийу, Я^ке^с, К. Уагуаш, О. уап ОоПтегезеп, М. УаШоггс, У. УоэЫтига и других. Однако проведенные исследования, несмотря на их глубину, носят, в определенной степени, локальный характер, а задачи управления судами при траверзном способе передачи грузов рассмотрены только в постановочном варианте.
Актуальность исследований управления судном при передаче грузов в море диктуется, во-первых современными потребностями при освоении пространств и ресурсов Мирового океанаво-вторых, повышением эффективности морского флота в русле Морской доктрины России, в-третьих, наличием большого числа нерешенных задач, прямо связанных с технической эксплуатацией судов при бесконтактном способе грузопередачи в условиях повышенного волнения моря.
Объект исследования — грузовые операции в море.
Предмет исследования — безопасность мореплавания при траверзном способе передачи груза в море.
Целью диссертационного исследования является разработка моделей, методик и алгоритмов управления судами и технического обеспечения грузопередачи траверзным способом при повышенном волнении моря.
В число основных задач исследования входят:
— анализ современного состояния технического обеспечения грузопередачи на суда в открытом море;
— исследование поведения судов при различных схемах силового воздействия со стороны подвесной канатной дороги;
— разработка методики и модели управления судами при траверзном способе передачи грузов;
— определение влияния грузопередачи на остойчивость судна.
— разработка практических рекомендаций по управлению судном при использовании траверзного способа грузопередачи;
— исследование возможности автоматизированного управления судами при передаче грузов с помощью подвесных канатных дорог;
— создание программного обеспечения для решения задач управления судами при траверзном способе передачи грузов.
Научная новизна диссертационной работы заключается в комплексном исследовании процесса грузопередачи и управления судном, в результате чего:
1. Разработана методика определения управляющих воздействий на судно при грузопередаче с учетом месторасположения точки крепления ПКД, траверзного расстояния, скорости и относительного положения судов, массы передаваемого груза в условиях повышенного волнения моря базирующаяся на: использовании уравнений движения судна с введением дополнительной силы от действия ПКД;
— выделении трех этапов процесса грузопередачи (подход, передача груза, отход);
— разработке алгоритмов управления судном на каждом из выделенных этапов процесса передачи груза траверзным способом в открытом море.
2. Разработана новая математическая модель зависимости угла дрейфа и требуемого угла перекладки руля с учетом дополнительной силы воздействия подвесной канатной дороги, что обеспечивает более полный учет силовых факторов воздействия на судно.
3. Усовершенствована схема подвесной канатной дороги, отличающаяся от известных отсутствием несущего и введением спуско-подъемного канатов, что упрощает конструкцию канатной дороги и повышает ее надежность.
4. Впервые произведена оценка остойчивости крупнотоннажных судов под действием поперечной составляющей натяжения ПКД: выведена линейная зависимость угла крена от высоты точки крепления ПКДнайдены значения углов крена с помощью диаграмм динамической остойчивости, что обеспечивает повышение безопасности грузопередачи.
Теоретическая значимость заключается в разработке научно-методического аппарата моделирования динамического состояния и прогнозирования поведения судна при траверзном способе передачи груза в условиях повышенного волнения моря.
Практическая ценность диссертации состоит в разработке эффективных инженерных методов анализа, оценки, формирования и обоснования технических характеристик морских • грузопередающих устройств, а также научно-методической базы для разработки и принятия алгоритма расчета и обоснования оптимального решения вопросов управления судном при передаче груза в море траверзным способом.
Достоверность и обоснованность результатов, полученных в диссертации, обеспечивается использованием известных положений теоретической механики, динамики грузопередающих устройств, гидродинамики, теории автоматического управления судном, математического моделирования, хорошей сходимостью полученных результатов с исследованиями отечественных и зарубежных специалистов.
0.3 Краткое содержание работы.
Во введении обоснована актуальность диссертации, сформулированы цели и задачи исследования, показана научная новизна и практическая значимость работы.
В первой главе выполнен анализ существующих способов и устройств передачи грузов в море и дана оценка условий их работы, сформулирована постановка задач исследования.
В п. 1.1 приводится структурная схема таких грузовых устройств и описывается назначение основных их узлов и элементов.
В п. 1.2 рассматриваются условия работы судовых грузопередающих устройств. На примере бортовой, килевой и вертикальной качки судна показано воздействие сил инерции на судовые конструкции, которые необходимо учитывать при динамическом расчете ПКД.
В п. 1.3 сформулированы специфические требования, предъявляемые к грузовым устройствам со следящим приводом, т. е. безударность и безопасность проведения грузовых операций, а также плавность движения передаваемого груза.
В п. 1.4 рассмотрены способы и устройства для передачи грузов бесконтактным кильватерным способом. Представлены схемы устройств для грузопередачи на буровую вышку (или другой стационарный объект) и необорудованный берег.
В п. 1.5 рассмотрены устройства для передачи грузов бесконтактным траверзным способом.
Во второй главе дан анализ усилий в канатах подвесной дороги при передаче грузов в морских условиях.
В п. 2.1 отмечено, что статический расчет является проектным, устанавливающим взаимосвязь между задаваемыми и искомыми параметрами грузопередающих устройств. Представлена методика статического расчета обобщенной 3-канатной ПКД, позволяющая определить усилия в канатах других схем подвесных дорог.
В п. 2.2 получены уравнения, позволяющие рассчитать траекторию движения груза по режимам 2 и 3, обеспечивающим подход и отход грузовой тележки с грузом передающему или принимающему судну. Приведены графики зависимости стрелы провисания ПКД в зависимости от эксплуатационных параметров.
В п. 2.3 представлена методика определения суммарных относительных перемещений точек подвеса канатной дороги в условиях качки судов на морском волнении.
В п. 2.4 рассматриваются общие положения и обосновывается расчетная схема грузопередающего устройства, представленная как механическая система, состоящая из натяжного устройства, следящеприводной лебедки и грузовой тележки. На основе принятой схемы грузопередающего устройства составлена система дифференциальных уравнений (математическая модель), описывающая динамические процессы в канатной системе подвесных дорог различного исполнения.
В п. 2.5 исследована возможность возникновения параметрических колебаний и их влияние на динамику грузопередающего устройства.
В третьей главе приводится разработанная математическая модель движения судна при траверзном способе передачи грузов в море.
В п. 3.1 рассмотрены различные математические модели движения судна, дана оценка их достоинств и недостатков.
В п. 3.2 рассмотрены инерционные и неинерционные силы и моменты, действующие на корпус судна.
В п. 3.3 дан анализ сил, действующих на рулевое устройство судна. Приведены расчетные схемы для рулей различных типов и поворотных насадок.
В п. 3.4 рассматриваются гидрометеорологические факторы (ветер и волнение), влияющие на управляемость судна.
В п. 3.5 произведен анализ сил гидродинамического взаимодействия между судами. Показаны зависимости сил и моментов от размеров судов, расстояния между судами, их скорости и углов дрейфа.
В п. 3.6 рассмотрены дополнительные сил и моменты от действия канатной дороги, влияние ее расположения на угол дрейфа и угол перекладки руля.
В п. 3.7 приведена обобщенная математическая модель движения судна с учетом всех вышеперечисленных факторов. Даны формулы расчета коэффициентов.
В четвертой главе рассмотрены вопросы управления судном при траверзном способе передачи грузов в море.
В п 4.1. рассмотрено управление судном при подходе. Произведен расчет углов дрейфа и углов перекладки руля для двух судов в зависимости от продольного расстояния, бокового расстояния, скорости.
В п 4.2. рассмотрено управление судном при передаче груза. Рассчитаны углы дрейфа и требуемые углы перекладки руля для двух судов в зависимости от продольного расстояния, бокового расстояния, массы передаваемого груза, волнения.
Дана оценка взаимодействия между судами с учетом как сил гидродинамического притяжения, так и сил со стороны канатной дороги. Выполнено исследование по оптимизации расстояния между судами идущими параллельными курсами и «связанными» канатной дорогой.
В п. 4.3 рассмотрено управление судном при окончании операции передачи груза и расхождении.
В п. 4.4 приведены рекомендации по управлению судном при параллельном движении на малых траверзных расстояниях.
В п. 4.5 представлены результаты анализа экспериментальных данных. В п. 4.6 дана оценка остойчивости крупнотоннажных судов при передаче грузов с помощью подвесных канатных дорог;
В п. 4.7 представлены элементы автоматизированной системы управления судном по поперечному смещению при передаче грузов траверзным способом с учетом приема сигнала спутниковых навигационных средств.
I. АНАЛИЗ СПОСОБОВ И УСТРОЙСТВ ПЕРЕДАЧИ ГРУЗОВ В МОРЕ.
1.1. Общие положения.
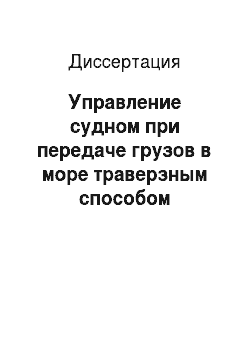
Все судовые грузовые устройства со следящим приводом, несмотря на многообразие их схем, имеют единую структурную схему, представленную на рис. 1.1. Отличительным признаком всех таких устройств является наличие механизма слежения, называемого иногда следященатяжным устройством, обеспечивающим постоянство скорости движения передаваемого груза в процессе качки судов относительно места его приема или выдачи. Грузовое устройство, лишенное механизма слежения, превращается в обычное стационарное, которое используется в наземных условиях, а также на судах в условиях тихой воды.
Механизм передвижения груза представляет собой подъемный механизм в кранах или тяговый механизм (перемещения грузовой тележки) — в канатных дорогах. Механическая связь соединяет механизм слежения с механизмом передвижения груза, сообщая последнему дополнительную скорость, источником которой являются натяжное устройство и связь с обслуживаемым судном.
Дополнительная скорость, складываясь со скоростью, развиваемой механизмом передвижения, обеспечивает постоянство скорости движения груза относительно колеблющегося в пространства места его выдачи или приема. Обычно, по конструктивным соображениям, механическая связь и механизм передвижения груза располагаются в едином блоке, образуя так называемое следящеприводное устройство (следящеприводную лебедку). В качестве связи с обслуживаемым судном обычно используется канат, один конец которого закрепляется на этом судне, а другой связан, тем или иным образом с механизмом слежения. Данный канат одновременно выполняет функции несущего или направляющего органа.
Рис. 1.1. Структурная схема грузового устройства со следящим приводом.
Натяжные устройства выполняются в виде электро-, гидро-, или пневмопривода, а также в виде грузового противовеса, в состав прочих входят те механизмы, которые присущи всем грузовым устройствам обычного назначения, например, механизмы поворота и изменения вылета стрелы крана, механизм подъема груза канатной дороги и т. п.
В структурном смысле краны отличаются от канатных дорог более простой канатной системой. Можно считать, (и это показано на рис 1.2), что трехканатная судовая дорога по своей структуре представляет собой общий случай судового грузового устройства со следящим приводом, а все другие подобные устройства, например краны, являются ее частными случаями. Из рис. 1.2 видно, что схема б) отличается от схемы а) только отсутствием каната 2.
Такое единое структурное представление грузовых устройств со следящим приводом позволяет в дальнейшем применять одни и те же методы к их теоретическому исследованию и проектированию, а также наметить общие требования, предъявляемые к устройствам к следящеприводной лебедке.
Рис 1.2. Канатная система: а) трехканатной дороги б) крана.
Рис. 1.3. Устройство нагружения тяговых канатов в целом и их основные элементы.
4.8 Выводы по главе.
С точки зрения управления судном процесс передачи груза траверзным способом разбивается на несколько этапов: выход на позицию, удержание позициипередача грузов, отход.
Из рассмотренных способов выхода на позицию наиболее предпочтительными являются способы подхода с острых кормовых углов.
Произведен расчет требуемых углов перекладки руля и углов дрейфа для выхода на позицию судов с различными водоизмещениями.
При передаче груза суда сохраняют свои относительные позиции, появляется дополнительная сила натяжения канатов.
На основе математической модели произведены расчеты зависимости угла дрейфа и угла перекладки руля от массы передаваемого груза, от точки крепления ПКД, от расстояния между ДП судов, от скорости движения судов и их рыскания и от действия волнения.
При отходе по окончании операции передачи необходимо учитывать гидродинамические силы и моменты в зависимости от продольного расстояния и от инерционных характеристик судов.
Разработаны рекомендации по управлению судном для капитанов при параллельном движении судов на малых траверзных расстояниях (ситуация обгона или передачи груза траверзным способом).
Результаты эксперимента показали, что прелагаемая модель является удовлетворительной.
Рассмотрен вопрос влияния грузопередачи на остойчивость судна.
Предложена автоматическая система удержания судов на параллельных траекториях движения на основе получения информации через спутниковую систему, что является более точным и надежным по сравнению с механической связью.
ЗАКЛЮЧЕНИЕ
.
В диссертации получены следующие результаты:
1. На базе анализа способов и устройств передачи грузов в море разработана концепция дальнейшего совершенствования траверзного способа как наиболее перспективного, использование которого исключает швартовные операции, позволяет выполнять передачу грузов, а в необходимых случаях и людей, на ходу судна в условиях повышенного волнения моря.
2. Усовершенствована схема подвесной канатной дороги, отличающаяся от известных отсутствием несущего и введением спуско-подъемного канатов, что упрощает конструкцию канатной дороги и повышает ее надежность. Выполнен статический расчет усилий во всех канатах ПКД.
3. На базе уравнений Лагранжа второго рода составлены дифференциальные уравнения, позволяющие описать динамические процессы во всех элементах ПКД.
4. Разработана методика определения управляющих воздействий на судно при грузопередаче с учетом месторасположения точки крепления ПКД, траверзного расстояния, скорости и относительного положения судов, массы передаваемого груза в условиях повышенного волнения моря. Применение этой методики повышает точность, оперативность и обоснованность выработки управляющих воздействий на судно при грузопередаче.
5. На основе анализа существующих математических моделей разработана новая математическая модель зависимости угла дрейфа и требуемого угла перекладки руля с учетом дополнительной силы воздействия подвесной канатной дороги, что обеспечивает более полный учет силовых факторов воздействия на судно.
6. Разработаны алгоритмы и математические модели управления судном при подходе, передаче грузов и отходе.
7. Произведена оценка остойчивости крупнотоннажных судов под действием поперечной составляющей натяжения ПКД: выведена линейная зависимость угла крена от высоты точки крепления ПКДнайдены значения углов крена, с помощью диаграмм динамической остойчивости, что обеспечивает повышение безопасности грузопередачи.
8. Предложена усовершенствованная автоматизированная система удержания судов на эквидистантных траекториях движения с использованием современных спутниковых навигационных систем.
9. Разработано программное обеспечение решения задач управления судами при траверзном способе передачи грузов в море.
Список литературы
- Андреева Л.Н., Киев A.B., Маслов А. Е., Махорин Н. И., Соколов Г. С. Средства передачи грузов на суда в море. Л., 1973.
- Афремов А.Ш., Богданов А. И., Малиновская В. А., Николаев Е. П. Влияние гидродинамических сил на управляемость СВП.- Труды НТО Суд-прома, 1972, вып. 186, С. 202−211.
- Барамидзе K.M. Канатные дороги. М.: Знание, 1970. — 32с.
- Басин A.M. Ходкость и управляемость судов. Часть 1, 2. М., «Транспорт», 1968−255с.
- Бачище A.B. Основы расчета и проектирования судовых грузопере-дающих устройств с приводами слежения. Диссертация на соискание ученой степени доктора технических наук. Кал-д, 1993. — 276с.
- Бачище A.B. Расчет и проектирование судовых грузопередающих устройств Калининград: КТИРПИХ, 1992. — 256с.
- Бачище A.B., Махорин Н. И. Передача грузов в море. Мурманск, 1991.- 102с.
- Благовещенский С.И. Качка корабля. Л.: Судпромгиз, 1954.520с.
- Богословский А.М., Костюков A.A. Явление взаимного присасывания судов. М.: Морской транспорт, 1960. — 79с.
- Бородин E. JL, Бачище A.B. Анализ сил и моментов гидродинамического взаимодействия между судами. // Изв. Вузов. Сев.-Кавк. Регион. Техн. науки. Проблемы водного транспорта. 2008. — С. 27−30.
- Бородин E.JI., Бачище A.B. Анализ управляемости судна типа «Крым» при траверзном способе передачи грузов в море: Сб. научных трудов НГМА.Вып.5.- Новороссийск.: НГМА, 2000.- С. 89−92.
- Бородин E. JL, Бачище A.B. Использование траверзного способа передачи груза для неподвижных судов: Сб. научных трудов НГМА.Вып.6-Новороссийск.: НГМА, 2001.-С. 87−88.
- Бородин E. JL, Бачище A.B. Исследование взаимодействия судов при передаче грузов в открытом море: Сб. трудов, посвященный 300-летию морского флота-Новороссийск.: НГМА, 1996 С. 3−4.
- Бородин E. JL, Бачище A.B., Ерыгин В. В., Кондратьев С. И. Расчет угла перекладки руля и угла дрейфа при траверзном способе передачи грузов в море: Сб. научных трудов НГМА.Вып.9 Новороссийск.: НГМА, 2004- С. 47−48.
- Бородин E. JL, Бачище A.B., Кондратьев С. И. Влияние расстояния между судами на силы и моменты взаимодействия при траверзном способе передачи груза // Изв. Вузов. Сев.—Кавк. Регион. Техн. науки. Проблемы водного транспорта. -2006. 4.1. — С. 3−5.
- Бородин E. JL, Бачище A.B., Кондратьев С. И. К вопросу управления судном при передаче груза траверзным способом. // Изв. Вузов. Сев.-Кавк. Регион. Техн. науки. Проблемы водного транспорта. — 2008. — С. 33−35.
- Бородин E. JL, Бачище A.B., Кондратьев С. И. Управление судном по выходу на позицию для передачи груза траверзным способом // Изв. Вузов. Сев.-Кавк. Регион. Техн. науки. Проблемы водного транспорта. — 2006. 4.1. -С. 36−37.
- Бородин E.JI., Васьков A.C., Довгаль И. В. Анализ математических моделей движения судна- рук.-Деп в В/О «Мортехинформреклама», 09.12.86, N 665-МФ, Новороссийск- НВИМУ 21с.
- Бородин Ю.Л. Исследование динамических перегрузок в судовых канатных дорогах при волнении моря на основе методов рационального планирования эксперимента.: Автореф. Дис. кандидата техн. наук. Л.- -21с.
- Бугаенко Б.А., Магула В. Э. Специальные судовые устройства. Л: Судостроение, 1983. — 392с.
- Войткунский Я.И., Першиц Р. Я., Титов И. А. Справочник по теории корабля. Судовые движители и управляемость. Л., «Судостроение», 1973.
- Войткунский Я.И., Фадеев Ю. И. К вопросу об определении сил гидродинамического взаимодействия между судами. Труды ЛКИ, 1976, вып. 104, С. 32−36.
- Воробьёв Ю.Л., Смирнова Т. В. Атлас сил и моментов гидродинамического взаимодействия судов, расходящихся на мелководном фарватере. -рук.-Деп в В/О «Мортехинформреклама», 10.07.86, N 592-МФ, Одесса, ОИИМФ, — 43с.
- Гидродинамика судна в стесненном фарватере/ Ю. Л. Воробьев. -СПб.: Судостроение, 1992.224с.
- Дукельский А.И. Подвесные канатные дороги и кабельные краны. М. — Л.: Машиностроение, 1966. — 484с.
- Задачи навигации и управления при стабилизации судна на траектории / С. П. Дмитриев, А. В. Пелевин.- СПб.: ГНЦ РФ ЦНИИ «Электроприбор», 2004.- 160с.
- Костюков A.A. Взаимодействие тел, движущихся в жидкости. Л.: Судостроение, 1972. — 310с.
- Кулагин В.Д. Теория и устройство морских промысловых судов. -Л.: Судостроение, 1974,-440с.
- Ламб Г. Гидродинамика.- М.: ОГИЗ Гостехиздат, 1947, — 928с.
- Луговский В.В., Ачкинадзе А. Ш., Войткунская А. Я. Расчетно-эксплуатационная оценка качки связанных судов на волнении. Труды ЛКИ, 1976, вып. 104, С. 65−74.
- Марголин Ш. Ф. Теория механизмов и машин. Высшая школа. Минск, 1968.
- Маслов А.Е., Плотников A.M. Динамические явления в канатной системе при колебательных перемещениях точек подвеса каната. В кн.: Стальные канаты. Киев.: Техника, 1973, № 10.
- Мастушкин Ю.М. Гидродинамическое взаимодействие судов при встречах и обгонах. Л.: Судостроение, 1987. — 124с.
- Мастушкин Ю.М. Управляемость промысловых судов—М.: Легкая и пищевая промышленность, 1981. 232с.
- Махорин Н.И. Судовые кабельные краны. Л.: Судостроение, 1969.-84с.
- Наставление по швартовным и грузовым операциям в море судов флота рыбной промышленности СССР. Л., Транспорт, 2002, 72 с.
- Передача грузов в море. Справочник. Горшков И. А., Махорин Н. И. Л., «Судостроение», 1977, 256с.
- Першиц Р.Я. Управляемость и управление судном. JL: Судостроение, 1983,272 с.
- Пименов В.П. Определение гидродинамических коэффициентов взаимодействия судов при обгоне на небольших траверзных расстояниях. -Судовождение, 1970, вып. II, С. 82−90.
- Поляков А.Е. Исследование колебаний груза в условиях волнения моря. —Дис. канд.тех.наук. -Мурманск-Николаев, 1978. -180с.
- Правила классификации и постройки морских судов. Том 1, 2008 (12 издание). СПб: Морской Регистр, 2008, 500с.
- Романенко Н.Г. Система автоматизированного управления грузовыми стреловыми устройствами взаимодействующих судов. Автореферат диссертации на соискание ученой степени канд.техн.наук: 05.13.06. Астрахань, 2006.-24 с.
- Система передачи грузов в море. «Shipdlang Mar. Engng Jnt», 1975, IV, V, № 1187, p.247. (Система разработана на верфи Rauma Repola, Финляндия).
- Снопков В.И. Эксплуатация специализированных судов. М.: Транспорт, 1987. -287с.
- Соболев Г. В. Управляемость корабля и автоматизация судовождения (Гидродинамика криволинейного движения и регулирование курса). Л., «Судостроение», 1976, 477 с.
- Справочник по теории корабля: В трех томах. Том 1. Гидромеханика. Сопротивление движению судов. Судовые движители/ Под ред. Я. И. Войткунского. JL: Судостроение, 1985. — 768 е., ил.
- Справочник по теории корабля: В трех томах. Том 2. Статика судов. Качка судов/ Под ред. Я. И. Войткунского JL: Судостроение, 1985 — 440 е., ил.
- Справочник по теории корабля: В трех томах. Том 3. Управляемость водоизмещающих судов. Гидродинамика судов с динамическимипринципами поддержания/ Под ред. Я. И. Войткунского. JL: Судостроение, 1985.-544 е., ил.
- Старжинский В.М. Прикладные методы нелинейных колебаний. -М.: Наука, 1977.-255с.
- Судовые устройства: Справочник/Под ред. М. Н. Александрова. JL: Судостроение, 1987. — 656с.
- Тарг С.М. Краткий курс теоретической механики. М., Высшая школа, 1995.
- Фрейдзон И.Р. Математическое моделирование судовых систем автоматического управления. Л.: Судостроение, 1969, 496 с. ¦
- Хомамото К. Теоретические аспекты математического моделирования.-Них. ДЗ. Гаккай, 1977, 577, С. 322−329, (Перевод №А-68 539).
- Abkowitz, М.А., «Measurement of Hydrodynamic Characteristics from Ship Maneuvering Trials by Systems Identification,» Society of Naval Architects and Marine Engineers (SNAME) Transactions 88: pp. 283−318.
- Amerongen J., Udink ten Cate A.J. Adaptive autopilots for ships Ship Operation Automation, 1973, pp. 156−163.
- Astrom K.J., Kallstrom C.G. Identification of ship steering dynamics-Automatica, 1976, Vol.1, pp. 9−22.
- Bech M.I. Some guidelines to the optimum adjustment of autopilots in ships.- Schip en Werf, 1972, Vol. 39, No. 11, pp. 233−240.
- Clarke D.A. A new non-linear equation for ship manoeuvring.- International Shipbuilding Progress, 1971, Vol. 18, No. 201
- Dagnino P., Loccisi D., Piattelli M., Tiano A. «Proget-to Esquilino»: an experiment about an optimal gyro pilot — Ship Operation Automation, 1975, pp. 130−137.
- Dand, I. W., and D. B. Hood. 1983. Manoeuvreing Experiments Using Two Geosims of the Esso Osaka. National Maritime Institute (NMI) Report No. NMI R 163. Feltham, England: NMI.
- Gill A.D. The identification of manoeuvring equations from ship trials results The Royal Institute of Naval Architects, 1975, pp. 145−156.
- Hwang, W.Y., «Hydrodynamic Interactions Between Ships in Shallow Waters,» Masters Thesis, Massachusetts Institute of Technology, September 1976.
- Inoue, S., Hirano, M., and Kijima, K., «Hydrodynamic Derivatives on Ship Maneuvering,» International Shipbuilding Progress, Rotterdam, Netherlands, Vol. 28, No. 321, May 1981.
- Kanshine A., Hollocou Y. Mathematical model representing the behaviour of large vessels.- 10-th Conference Int. Assos. Lighthouse Auth., Tokyo, 1980.
- Khattab O.M., Nomoto K. Steering control of a ship in a canal. Part 1-Кансай дээсэн кеге, 1978, pp. 41−55.
- Kijima, K., «Maneuverability of a Ship in Confined Water,» Proceedings, International Conference on Ship Maneuverability Prediction and Achievement, RINA, London, April/May, 1987.
- Kobayashi H., Nakatani M. A study on minimum ship’s velocity for course keeping in the uniform wind.-Нихон Кокай Гаккай Ромбунсю, 1982, No.66, pp. 117−125.
- Kose К. On a new mathematical model of manoeuvring motion of a ship and its application- International Shipbuilding Progrees, 1982, Vol.29, No.336, pp. 205−220.
- Kuljaca L., Vukic Z, Identifikacija broda kao objekta upravljanja po kursu i traektoriji.-Brodogradnja, 1981, Vol. 29, No. 2, pp. 135−143.
- Lisowski J. Metody syntry uktadow bezpiecznego sterowama ruchem statku Politechnika Gdanska Zeszyty Naukowe, 1979, No. 301, pp. 3−114.
- Majohr J. Zu Pragen der Proze-Banalyse und der automatisierung der kurssteurung von schiffen Seewirfschaft, 1982, Vol. 14, No. 10, pp. 485−491.
- Muellerschoen R.J., Bar-Sever Y.E., Bertiger W.I., Stovers D.A. Decimeter Accuracy. NASA’s Global DGPS for High-precision Users. GPS World. January 2001. pp. 14−20.
- Muellerschoen R.J., Bertiger W.I., Lough M., Stovers D. and Dong D. An Internet-Based Global differential GPS System, Initial Results. ION National Technical Meeting. Anaheim. CA. Jan. 2000.
- Naval Warfare Publication, Underway Replenishment, NWP 4−01.4 (Formerly NWP 14 (Rev. E)), Department of the US Navy, 2004.
- Newman J.N. Theoretical methods in ship manoeuvring. Advances in Marine Technology, 1979, Vol. 1, pp. 335−359.
- Nomoto, K., and Norrbin, N.H., «A Review of Methods of Defining and Measuring the Maneuverability of Ships,» International Towing Tank Conference, Appendix I, Report of Maneuverability Committee, Rome, 1969.
- Pujino M. The effect of frequency dependence of the stability derivatives on manoeuvring motion International Shipbuilding Progress, 1975, Vol. 22.
- Reid B.E. Energy losses due to limit-cyde behaviour of large tanker under automatic steering control-Trans. ASME. J. Energy Resour. Technol., 1983, Vol. 105, No. 2, pp. 222−229.
- Tuck, E.O. and Newman, J.N. «Hydrodynamic interactions between ships», 10th Symposium on Naval Hydrodynamics, 1974, Cambridge, Mass. 1974. Proceedings, Office ofNaval Research, Washington, D.C., pp. 35−70.
- Vantorre, M., Eloot, K., 1996, «Hydrodynamic phenomena affecting manoeuvres at low speed in shallow navigation areas», 11th International Harbour Congres, Antwerpen, Belgium, pp 535−546
- Varyani, K.S. and Krishnankutty, P. «Hydrodynamic Interaction between two ships», EU Project TOHPIC, Document No 1.3.08.01, May 2002
- Volta E. Procedimenti automatice per il controllodella navigazione-Automazione e strumentazione, 1976, Vol. 24, No. 3, pp. 117−139.
- Yasukawa, H., Yoshimura, Y., Nakatake, K., 1996, «Hydrodynamic Forces on a Ship Moving with Constant Rudder Angle», MARSIM'96, Copenhagen, Denmark, pp. 435−447.