Синтез систем управления с быстрыми алгоритмами адаптации для многоканальных и многорежимных объектов
Апробация результатов. Основные положения диссертации докладывались и обсуждались на 5-ом Ленинградском симпозиуме по теории адаптивных систем (1991) — международной научно-технической конференции «Актуальные проблемы электронного приборостроения» (Новосибирск, 1996, 1998, 2000, 2002, 2006) — международной конференции по телематике и компьютерным технологиям в обучении — TELEMATICS… Читать ещё >
Содержание
- ВВЕДЕНИЕ
- ГЛАВА 1. ОБЩАЯ ХАРАКТЕРИСТИКА ЗАДАЧИ АДАПТИВНОГО УПРАВЛЕНИЯ
- 1. 1. Модели объектов в условиях неопределенности
- 1. 2. Методы синтеза систем прямого адаптивного управления
- 1. 2. 1. Задача синтеза
- 1. 2. 2. Алгоритмы адаптации, синтезированные градиентным методом
- 1. 2. 3. Алгоритмы адаптации на основе схемы скоростного градиента
- 1. 2. 4. Алгоритмы адаптации, синтезированные методом функций Ляпунова
- 1. 2. 5. Адаптивные системы с переменной структурой
- 1. 2. 6. Выводы
- 1. 3. Задачи исследования
- ГЛАВА 2. СИНТЕЗ СИСТЕМ СТАБИЛИЗАЦИИ С БЫСТРЫМИ АЛГОРИТМАМИ АДАПТАЦИИ
- 2. 1. Синтез многоканальных адаптивных систем
- 2. 1. 1. Описание задачи
- 2. 1. 2. Условия реализуемости алгоритма адаптации
- 2. 1. 3. Синтез многоканальных адаптивных систем по выходным переменным
- 2. 1. 4. Быстрый интегральный алгоритм адаптации
- 2. 2. Синтез одноканальных адаптивных систем 61−63 ¦
- 2. 3. Дискретный адаптивный регулятор для одноканальных систем
- 2. 4. Вывод
- 2. 1. Синтез многоканальных адаптивных систем
- ГЛАВА 3. АНАЛИЗ УСТОЙЧИВОСТИ АДАПТИВНЫХ СИСТЕМ С РАЗНОТЕМПОВЫМИ ДВИЖЕНИЯМИ
- 3. 1. Анализ устойчивости непрерывных многоканальных адаптивных систем
- 3. 1. 1. Описание задачи исследования
- 3. 1. 2. Анализ сходимости процессов к желаемой траектории в системах без фильтра оценки производных
- 3. 1. 3. Анализ систем с фильтром оценки производных
- 3. 1. 4. Анализ систем с фильтром оценки производных методом разделения движений
- 3. 2. Анализ сходимости процессов в дискретной адаптивной системе
- 3. 2. 1. Анализ устойчивости системы с постоянными параметрическими возмущениями
- 3. 2. 2. Анализ устойчивости системы с переменными параметрическими возмущениями
- 3. 2. 3. Анализ свойств дискретной системы с одним настраиваемым параметром
- 3. 3. Выводы
- 3. 1. Анализ устойчивости непрерывных многоканальных адаптивных систем
- ГЛАВА 4. АНАЛИЗ ВЛИЯНИЯ ОГРАНИЧЕННЫХ ВОЗМУЩЕНИЙ
- 4. 1. Описание задачи исследования
- 4. 2. Анализ влияния аддитивного возмущения на сходимость процессов
- 4. 3. Анализ влияния ограниченного возмущения на управляющее воздействие
- 4. 4. Влияние случайного возмущения на управляющее воздействие
- 4. 5. Выводы
- ГЛАВА 5. РАЗРАБОТКА НЕПРЕРЫВНЫХ ОДНОКАНАЛЬНЫХ АДАПТИВНЫХ СИСТЕМ СТАБИЛИЗАЦИИ ПОНИЖЕННОГО ПОРЯДКА
- 5. 1. Задача уменьшения порядка систем прямого адаптивного управления. Методы решения
- 5. 2. Описание класса одноканальных объектов
- 5. 3. Модификация математической модели объекта управления
- 5. 4. Синтез адаптивных систем пониженного порядка
- 5. 5. Определение коэффициента передачи адаптора в системе с одним контуром настройки
- 5. 6. Определение параметров адаптора в системе с двумя контурами настройки
- 5. 7. Анализ формирования управляющего воздействия
- 5. 8. Анализ свойств адаптивных систем с входным формирующим фильтром
- 5. 9. Выводы
- ГЛАВА 6. РАЗРАБОТКА АДАПТИВНЫХ РЕГУЛЯТОРОВ ДЛЯ МНОГОРЕЖИМНЫХ ДИНАМИЧЕСКИХ СИСТЕМ 172−21Г
- 6. 1. Основные проблемы устойчивости и проектирования многорежимных систем
- 6. 1. 1. Переключаемые системы как модели многорежимных динамических объектов
- 6. 1. 2. Виды математических моделей
- 6. 1. 3. Основные задачи устойчивости^
- 6. 1. 4. Общая характеристика задач и методов управления переключаемыми системами
- 6. 2. Синтез адаптивных регуляторов для одноканальных многорежимных систем
- 6. 2. 1. Постановка задачи синтеза
- 6. 2. 2. Описание процедуры синтеза
- 6. 2. 3. Условия устойчивости адаптивной переключаемой системы
- 6. 3. Синтез адаптивных регуляторов для многоканальных многорежимных систем
- 6. 3. 1. Описание задачи
- 6. 3. 2. Определение структуры адаптивного регулятора с параметрической настройкой
- 6. 3. 3. Определение структур адаптивных регуляторов с сигнально-параметрической и сигнальной настройками
- 6. 3. 4. Условия устойчивости
- 6. 3. 4. 1. Анализ адаптивной системы без фильтра оценки производных
- 6. 3. 4. 2. Анализ многорежимной адаптивной системы с фильтром оценки производных
- 6. 1. Основные проблемы устойчивости и проектирования многорежимных систем
- 6. 4. Выводы
- 7. 1. Адаптивная стабилизация маятниковой системы
- 7. 1. 1. Общая характеристика способов управления маятниковыми системами
- 7. 1. 2. Описание задачи стабилизации перевернутого маятника
- 7. 1. 3. Система стабилизации перевернутого маятника с сигнальной настройкой
- 7. 1. 4. Анализ адаптивной системы численным моделированием
- 7. 2. Разработка адаптивной системы стабилизации якоря электромагнитного исполнительного устройства
- 7. 2. 1. Описание объекта управления
- 7. 2. 2. Синтез адаптивного регулятора с двумя контурами настройки параметров
- 7. 2. 3. Анализ устойчивости замкнутой системы
- 7. 2. 4. Результаты моделирования
- 7. 3. Разработка системы управления движителем подводного аппарата
- 7. 3. 1. Общая характеристика подводного аппарата как объекта управления
- 7. 3. 2. Математическая модель движительного комплекса
- 7. 3. 3. Синтез адаптивного регулятора
- 7. 3. 4. Анализ влияния возмущений численным моделированием
- 7. 4. Выводы
Синтез систем управления с быстрыми алгоритмами адаптации для многоканальных и многорежимных объектов (реферат, курсовая, диплом, контрольная)
Актуальность темы
диссертационного исследования темы обусловлена выполнением исследований и разработок по приоритетным направлениям развития науки и технологий (технологий создания интеллектуальных систем навигации и управления, создания новых видов транспортных систем и управления ими). Диссертационное исследование связано с решением одной из фундаментальных проблем современной теории автоматического управления, а именно: синтезом эффективных алгоритмов адаптивного управления, обеспечивающих гарантированные показатели качества переходных процессов для нелинейных динамических систем в условиях неопределенности.
Теория адаптивного управления начала формироваться в средине прошлого века. Интерес, проявляемый к ней, учеными всего мира, до сих пор достаточно высокий. Отчасти это объясняется притягательностью основного принципа, на котором строится^ вся теория, — принципа приспособления (адаптации). Приспособление, обучение — ответ на недостаток информации о процессе, которым требуется управлять, о среде, в которой функционирует система: «то, что мы знаем, — ограничено, а то, чего мы не знаем, — бесконечно» (П.С. Лаплас). У истоков развития советской, впоследствии российской, школы адаптивного управления стояли известные учёные: А. Г. Александров, Б. Р. Андриевский, С. Д. Земляков, A.A. Красовский, В. М. Кунцевич, В. О. Никифоров, Б. Н. Петров, А. И. Рубан, В. Ю. Рутковский, В. В. Солодовников, В. А. Терехов, Е. Д. Теряев, А. В: Тимофеев, A.A. Фельдбаум, В. Н. Фомин, A.JI. Фрадков, Я. З. Цыпкин, И. Б. Ядыкин, В. А. Якубович и другие. Большой вклад в развитие теории адаптивного управления внесли работы K.J. Astrom, B.D.O. Anderson, I. Bar-Kana, D-S. Bayard, L. Braun, G.C. Goodwin, P. Ioannou, P. Kokotovic, I.D. Landau, K.S. Narendra, M.L. Tatnall и других ученых.
Принципы адаптивного управления впервые были использованы, в решении задачи управления летательными аппаратами. Принято считать, что первые адаптивные системы были созданы в конце второй мировой войны.
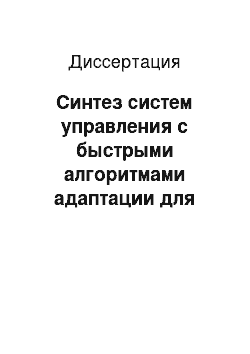
Немецкие изобретатели применили программное изменение коэффициентов усиления в системах управления ракет «Фау-2», «Вассер Фаль». Затем коэффициенты усиления^ в системах управления летательными аппаратами стали изменять в функции от скорости! напора, который измерялся в полёте с помощью специальных датчиков. [30]. Адаптивная система с настраиваемым коэффициентом усиления использована в автопилоте корпорации Minneapolis-Honneywell (L.T. Prince, R.C. Hendrick, J.H. Lindahl. Honneywell’s Flight Control System, Symposium on Adaptive Control, 1960) [215]. Блок-схема системы приведена на рисунке 1 (ЧЭ — чувствительный элемент, Ком — компенсатор, ОУ — объект управления, М — модель).
Рисунок 1- Блок-схема системы с настраиваемым коэффициентом усиления.
Коэффициент передачи К и, как следствие, ширина зоны пропускания поддерживались на требуемом уровне с помощью цепи адаптации. С увеличением коэффициента передачи замкнутая система приближается к границе устойчивости. Так как в рабочей полосе частот ^замО'оО!®!" гДе ^замЦсо) — частотная передаточная функция замкнутой системы, то выходная переменная системы достаточно близка к эталонному входному сигналу г (/), который генерировался с помощью простой модели. Изменение коэффициента усиления зависит от колебательности процессов в системе. На наличие колебаний анализировался управляющий сигнал. Для достиженияприемлемой точности в системах с адаптацией полоса пропускания модели, формирующей входной сигнал заданного вида, устанавливалась на уровне 1/3 ширины пропускания замкнутой системы. При этих условиях адаптивная система слабо чувствительна к изменениям параметров объекта управления.
За более чем полувековую историю существования теория адаптивного управления обогатилась многими интересными концепциями и методами. Однако, как отмечено в работах [30, 63, 149], практические достижения более скромны по сравнению теоретическими результатами. Несмотря на существующую неудовлетворенность внедрением теоретических результатов в практику, адаптивные регуляторы находят все большее применение во всех сферах человеческой деятельности. В [22] отмечено, что «за последние годы получены результаты практического использования адаптации в подвижных механических объектах промышленного и специального назначения, объектах воздушного транспорта и аэродромного обслуживания, лазерных технологических комплексах и многокоординатных прецизионных станках». Приведем несколько примеров. Ведущие мировые фирмы, такие как Fisher Control, Foxboro (США), Eurotherm, TCS (Великобритания), Coreci, Sereg (Франция), Autolog (Финляндия), осуществляют серийный выпуск адаптивных контроллеров. Комплексы фирмы Foxboro «Intelligent Automation Series» (I/A Series) включают в свой состав одноканальные адаптивные ПИД-регуляторы серий 760, 761 и многоканальные типа Microspec. В состав российской системы TRACE MODE входит программное обеспечение Adaptive Micro Trace Mode 6 для WinPAC — 8000, исполняющее самонастройку ПИДи ПДД-регуляторов. В АО «Черметавтоматика» разработана адаптивная система управления отжигом металла в колпаковых печах. Адаптивный ПИД-регулятор для стабилизации температуры в помещениях различного назначения предложен в [263].
В автомобилестроении адаптивные системы используются для регулирования скорости грузовиков, (АСС WABCO, URL: http://autoline.com.uaI управления светом фар (BMW, URL: http://www.bmw-avantage.ru) — адаптивные регуляторы вводятся в цепь рулевого управления [262]. Адаптивная электронная система управления зажиганием в двигателях внутреннего сгорания (БЗМ-В) устанавливается в серийно выпускаемых автомобилях с карбюраторными двигателями модулей: ВАЗ, ГАЗ, УАЗ, АЗЛК, ИЖ (URL: http://vmw.rasu.ru/newsite/ecatalog.php? erazd-O&-transport-15&-natmono=:0&-id=359У В [135] описана интегрированная адаптивная система управления воздушным движением во внештатных полетных ситуациях, в которой при выработке управляющего решения учитываются психофизиологические характеристики диспетчера — оператора (уровень его знаний, навыков и умений, опыт работы, текущее функциональное состояние), а также динамика изменения параметров ситуации и условий внешней среды. В [261] предложена система, в которой управление усилием и положением двурукого манипулятора осуществляется с помощью адаптивного регулятора. Адаптивный регулятор для устройств с циклическим режимом работы приведен в [260]. В [88] описаны структуры нелинейных адаптивных регуляторов для управления турбиной судовой энергоустановки. Применение адаптивных систем помогает в решении проблемы совершенствования парка современного металлорежущего оборудования с ЧПУ. Они позволяют учитывать параметры и факторы технологического процесса механической обработки.
Управление динамическими объектами в условиях неопределенности осуществляется как с помощью адаптивных, так и робастных регуляторов. Исследованию различных аспектов систем робастного управления посвящены работы Л. М. Бойчука, A.C. Вострикова, C.B. Емельянова, П. Д. Крутько, М. В. Меерова, В. И. Уткина, Г. В. Щипанова, В. Д. Юркевича и других.
На первой Всероссийской конференции научно-технической конференции «Мехатроника, автоматизация, управление», проходившей в 2004 году (г. Владимир), в очередной раз было отмечено, что одним из основных направлений исследований в области теории и практики систем автоматического и автоматизированного управления техническими объектами и технологическими процессами по-прежнему является адаптивное управление. На современном этапе развития техники и технологий актуальна разработка высокоточных систем управления. Проблема синтеза эффективных алгоритмов адаптивного управления, обеспечивающих гарантированные показатели качества переходных процессов для нелинейных динамических систем в условиях неопределенности, является фундаментальной проблемой современной теории автоматического управления.
Существует ряд работ, в которых представлены методы адаптивной компенсации параметрических и сигнальных возмущений [4, 10, 90, 106, 109, 114, 119, 159, 239, 266, 267, 279]. Параметрические возмущения обычно входят в модель объекта в виде постоянные неизвестные параметры либо в виде интервальных коэффициентов. Относительно сигнальных возмущений считается справедливым предположение о том, что они, являясь функциями времени, имеют малый темп изменения. Системы с производными координат состояния (или выходных переменных) в законе адаптации, синтезированные различными методами, представлены работах [2, 10, 33, 109, 115, 129, 157, 159, 239, 279] и других. В одноканальных системах, рассчитанных, например, вторым методом Ляпунова или с помощью градиентных процедур, используются обратные связи по производным выходной переменной до пЛпорядка включительно, где п — порядок объекта. Некоторые особенности этих систем связаны с тем, что синтез выполняется при допущении о постоянстве параметрических мультипликативных возмущений, и, как следствие, отсутствуют рекомендации по согласованию коэффициентов адаптивного закона управления, алгоритма адаптации, эталонного уравнения и уравнения, описывающего наблюдатель состояния. Малая чувствительность адаптивных систем к переменным мультипликативным параметрическим возмущениям требует дополнительного обоснования, которое чаще всего является непростой задачей. В одноканальных системах с наблюдателями состояния, но без идентификации параметров объекта, (системах прямого адаптивного управления) может возникнуть неустойчивость внутренних контуров. Огрубление алгоритмов адаптации в некоторых случаях помогает решить эту проблему. В системах с идентификацией параметров, выполняемой в реальном времени, неустойчивые внутренние контуры отсутствуют, но требуется знание точной модели объекта управления, что существенно ограничивает область их применения. В работе рассмотрена задача адаптивной компенсации возмущений различного вида. Особенность задачи заключается в том, что возмущения могут меняться в темпе с основными процессами объекта.
На протяжении нескольких десятков лет особое внимание уделяется разработке методов синтеза систем управления многорежимными процессами и объектами [22, 24, 53, 102, 103]. Специфика этого класса объектов заключается в большом разнообразии динамики и соответственно видов моделей, которые адекватны их динамическим свойствам. Это приводит к определенным трудностям при выборе методов синтеза и анализа систем управления данными объектами. В ряде случаев динамика многорежимных объектов описывается моделями переключаемых систем, для которых в последнее десятилетие получены интересные теоретические результаты в области разработки новых подходов, а также по обоснованию применения классических методов анализа устойчивости и синтеза управляющих устройств [162, 195, 211, 222, 223, 241, 244, 286]. В работе для определенного класса многорежимных объектов предложена модель в виде нелинейных дифференциальных уравнений с кусочно-непрерывными возмущениями, разработана методика синтеза адаптивных управляющих устройств и выполнен анализ устойчивости с помощью теорем, полученных для переключаемых систем.
Адаптивные системы управления имеют двухуровневую структуру и, как следствие, более сложную организацию и соответственно техническую реализацию по сравнению с неадаптивными системами [34, 57, 98, 113, 152, 161, 201, 247, 265]. Получение новых качественных свойств адаптивных систем без усложнения управляющего устройства является одним из основных направлений, как в теории адаптивных систем, так и автоматических систем в целом. Исследования в этой области имеют важное практическое значение, состоящее в повышении надежности, сокращении сроков и трудоемкости введения в эксплуатацию адаптивных регуляторов.
Таким образом, наиболее разработаны, методики расчета адаптивных систем управления динамическими объектами при-неизвестных постоянных или медленно меняющихся (по сравнению с основными процессами) возмущениях мультипликативно-параметрического или аддитивного видов. Задачами, требующими дальнейшего исследования, являются создание адаптивных систем, обладающих малой чувствительностью к переменным возмущениям различного вида, разработка способов, позволяющих упростить структуру управляющих устройств за счет уменьшения количества контуров настройки в адапторах и регуляторов в случае многорежимных объектов. Поэтому актуальными являются следующие задачи: синтез адаптивных систем управления для1 многоканальных и многорежимных объектов, функционирующих в условиях переменных возмущений различного вида, а также разработка и обоснование способов упрощения структур адаптивных управляющих устройств с учетом заданных качественных показателей для переходных и установившихся’процессов.
Цель диссертационной работы: является1 создание на базе существующих концепций теоретических основ анализа и синтеза адаптивных систем управления многоканальными и многорежимными объектами, направленных на повышение качества работы в условиях неконтролируемых переменных возмущений различных видов.
Поставленная цель достигается решением следующих задач:
1. Выбрать математические модели многоканальных и многорежимных объектов как базовую основу для решения задач синтеза адаптивных систем управления;
2. Разработать теоретические основы анализа и синтеза адаптивных систем управления многоканальными и многорежимными объектами, которые малочувствительны к неконтролируемым переменным возмущениям различных видов;
3. Исследовать работоспособность адаптивных систем управления при неконтролируемых переменных возмущениях;
4. Применить разработки в конкретных примерах.
Объект диссертационного исследования — системы адаптивного управления многоканальными и многорежимными объектами в условиях неопределенности.
Предметом диссертационного исследования являются теоретические основы, алгоритмы адаптации, структуры адаптивных систем управления многоканальными и многорежимными объектами, функционирующих в условиях изменяющихся характеристик внешней среды и неполной информации о математических моделях.
Методологической базой исследования являются методы классической и современной теории автоматического управления, функций Ляпунова, разделения движений, приближенные аналитические методы, принцип локализации, математический аппарат теории матриц, теории дифференциальных и разностных уравнений, теории случайных функцийсредства имитационного моделирования.
На защиту выносятся следующие основные положения:
1. Виды модельного представления объектов;
2. Быстрые интегральные алгоритмы адаптации систем управления непрерывными многоканальными и одноканальными объектами, многорежимными объектами с произвольной и неизвестной последовательностью смены режимов, одноканальными дискретными линейными объектами, функционирующими в условиях неопределенности математической модели и характеристик внешней среды;
3. Методика синтеза адаптивных систем управления с разнотемповыми движениями и обратной связью по первым производным координат состояния;
4. Оригинальная методика синтеза адаптивных систем с одним или двумя контурами настройки параметров в каналах управления;
5. Аналитическое обоснование и имитационное исследование достижения поставленных целей функционирования систем с помощью разработанных адаптивных алгоритмов управления, а именно: условия реализуемости алгоритмов адаптацииусловия устойчивости и оценки времени сходимости выходных процессов синтезированных систем к желаемой траектории при действии ограниченных переменных возмущенийоценки влияния аддитивных возмущений на установившиеся ошибки и ошибки формирования управляющих воздействийоригинальная аналитическая зависимость между величиной управляющего воздействия и коэффициентами эталонного уравненияструктуры фильтров, формирующих входные сигналы на систему, и рекомендации по выбору их параметров;
6. Структуры адаптивных управляющих устройств, полученные согласно разработанным методикам для маятниковой системы, электромагнитного исполнительного устройства, движительного комплекса автономного подводного аппарата при действии переменных возмущений различных видов.
Результаты решения первой задачи приведены в п. 1, второй — в п. 2, 3, 4, третьей — в п. 5, четвертой — в п. 6.
Научная новизна. Решена крупная проблема, состоящая в разработке теоретических основ анализа и синтеза адаптивных систем управления многоканальными и многорежимными объектами, направленных на повышение качества работы в условиях неконтролируемых переменных возмущений различных видов, имеющая важное научное и прикладное значение для развития технологий создания интеллектуальных систем управления, а именно:
1. Предложены виды модельного представления объектов, отличающиеся содержанием комбинированных возмущений, количество которых меньше, чем в исходной модели, при сохранении всех динамических свойств;
2. Предложены семейства быстрых интегральных алгоритмов адаптации,. отличающиеся зависимостью коэффициентов от темпа возмущений, а также использованием оценок вектора (матрицы) первых производных координат состояния или вектора первых производных выходных переменных, или в частном случае производных, включая старшую, выходной переменной;
3. Разработана методика синтеза адаптивных систем управления подклассами многоканальных и многорежимных объектов, учитывающая темп изменения возмущений и разнотемповость процессов в замкнутых системах;
4. Разработана оригинальная методика синтеза адаптивных систем управления на основе предложенных видов модельного представления объектов, позволяющая уменьшить количество настраиваемых параметров регулятора относительно общего числа переменных возмущений в исходной модели-.
5. Проведено исследование малочувствительных к ненаблюдаемым переменным возмущениям систем с интегральными алгоритмами адаптации, результатом которого явялются условия реализуемости алгоритмов адаптации, условия устойчивости замкнутых систем и найдены оценки времени сходимости процессов к желаемой траекторииоценено влияние аддитивных, возмущений на установившиеся ошибки и ошибки формирования управляющих воздействийвыявлена оригинальная аналитическая зависимость между величиной управляющего воздействия и коэффициентами эталонного уравнения.
Теоретическая значимость диссертации состоит в разработке модифицированных моделей объектов, алгоритмов адаптации, структур, методик синтеза адаптивньлх систем управления для подклассов многоканальных и многорежимных объектов, которые характеризуются высокой степенью неопределенности математических моделей и функционируют в условиях ненаблюдаемых переменных возмущенийв аналитическом обосновании работоспособности разработанных адаптивных систем.
Практическая значимость. Полученные расчетные соотношения позволяют осуществить выбор параметров адаптивных систем управления с обратной связью по первым производным координат состояния, обладающих малой чувствительностью к переменным возмущениям различных видов. Применение разработанных алгоритмов адаптации способствует повышению качественных показателей переходных процессов в условиях действия возмущений, изменяющихся в темпе с основными процессами системы. Использование управляющих устройств с одним или двумя контурами адаптации в соответствующих каналах, синтезированных по оригинальной методике, приводит к сокращению времени настройки адаптивных регуляторов, упрощению их реализации в условиях промышленного производства. Использование фильтров, формирующих входные сигналы на системы, структуры и параметры которых выбраны согласно сформулированным рекомендациям, способствуют уменьшению ^ энергетических затрат на вывод системы в рабочий режим. Предложенные структуры адаптивных управляющих устройств для-некоторых видов электромагнитных и электромеханических объектов пригодны к применению в тех задачах, когда необходимо обеспечить, малую чувствительность систем к ограниченным переменным возмущениям различных видов.
Реализация и внедрение результатов. Работа подготовлена на кафедре автоматики Новосибирского государственного техническогоуниверситета и связана^ с выполнением НИР: «Автоматическое управление динамическими объектами с переменными характеристиками на основепринципа локализации» (1986 — 2001 гг.), «Стабилизация динамических характеристик нелинейных систем посредством формирования разнотемповых движений» (2002 — 2003 гг.) по заданию Министерства образования и науки РФНИР «Новосибирский объединенный исследовательский университет высоких технологий» в рамках Федеральной целевой программы «Государственная поддержка интеграции высшего образования и фундаментальной науки» (1997 — 2001 гг.) — Федеральной целевой программы «Интеграция науки и высшего образования России на 2002 — 2006 гг." — Федеральная' целевая программа «Научные и научно-педагогические кадры инновационной России», проведение поисковых НИР по направлению «Многофункциональное приборостроение для промышленных систем управления» в рамках мероприятия 1.2.1 по проблеме «Разработка цифровых многоканальных прецизионных автоматически оптимизирующихся адаптивных промконтроллеров для непрерывных процессов и систем» (2009 — 2013 гг.) — инновационная образовательная программа НГТУ «Высокие технологии» в рамках приоритетного образовательного проекта «Образование» (2006 — 2008 гг.) — тематический план НИР НГТУ, проект: «Разработка и исследование систем автоматического-управления.нелинейными динамическими объектами с переменными характеристиками» (2006 — 2009 гг.) — гранты РФФИ: № 06−800 732 «Исследование и разработка адаптивных систем с регулятором пониженного порядка на основе принципа локализации» (2006 — 2008 гг.), № 08−08−982 «Исследование нелинейных систем управления с разнотемповыми процессами» (2008 -2010 гг.).
Результаты исследования использованы при’выполнении комплексного интеграционного проекта Сибирского отделения РАН «Исследование фундаментальных проблем создания интеллектуальных подводных роботов для изучения и освоения минеральных, биологических и энергетических ресурсовокеана» (2006;2008 гг.) — в проектно-конструкторской деятельности ЗАО «СИНЕТИК» при разработке системы управления литейных кранов^для Магнитогорского комбината и системы противораскачивания портального крана для Ванинского морского торгового порта.
Результаты работы используются при подготовке бакалавров и магистров по направлению «Автоматизация и управление», инженеров по специальности «Управление и информатика в технических системах», аспирантов по специальности «Системный анализ, управление и обработка информации» в Новосибирском государственном техническом университете. Разработанная методика синтеза адаптивных систем является частью курсов: «Адаптивные системы управления», «Оптимальные и адаптивные системы». Материалы работы представлены в учебном пособии [166] и ряде учебно-методических пособиях.
Апробация результатов. Основные положения диссертации докладывались и обсуждались на 5-ом Ленинградском симпозиуме по теории адаптивных систем (1991) — международной научно-технической конференции «Актуальные проблемы электронного приборостроения» (Новосибирск, 1996, 1998, 2000, 2002, 2006) — международной конференции по телематике и компьютерным технологиям в обучении — TELEMATICS (Санкт-Петербург, 2001, 2003) — 8-ом всероссийском съезде по теоретической и прикладной механике (Пермь, 2001) — международной конференции по моделированию, идентификации и управлению — IASTED «Modelling, Identification, and Control» (Grindelwald, Switzerland, 2004; Россия, Новосибирск, 2005, 2010) — международной конференции по проблемам управления (Москва, 2003, 2006) — международной научно-технической конференции «Информационные Системы и Технологии» — ИСТ 2003 (Новосибирск, 2003) — международной конференции по автоматическому управлению — «Автоматика» (Украина, Киев, 2004; Одесса, 2008) — международной научной конференции по физике и управлению IEEE PhysCon (Санкт-Петербург, 2005; Potsdam, 2007) — 9-ой международной Четаевской конференции «Аналитическая механика, устойчивость и управление движением» (Иркутск, 2007) — международной конференции «Проблемы управления и моделирования в сложных системах» (Самара, 2007, 2008) — международной научно-практической конференции «Мехатроника, автоматизация, управление» (Таганрог-Москва, 2007) — международной научно-практической конференции СИЭТ (Одесса, 2006, 2007) — международном семинаре им. Е. С. Пятницкого (Москва, 2006, 2008, 2010) — 6-ой конференции европейского механического общества по нелинейной динамике — Euromech Nonlinear Dynamics Conference (Санкт.
Петербург, 2008) — 13-ом симпозиуме по проблемам информационного управления в производстве Международной федерации по автоматическому управлению — ШАС ШСОМ (Москва, 2009), Международной научно-практической мультиконференции «Управление большими системами» (Москва, 2009) и других международных и всероссийских конференциях.
Публикации. По результатам исследований опубликовано 51 печатная работа, в том числе 10 в периодических изданиях, рекомендованных Высшей аттестационной комиссией (2 статьи в журнале «Известия РАН. Теория и системы управления», 4 статьи в журнале «Автометрии», 4 статьи в «Научном вестнике НГТУ»). Публикации полностью отражают основное содержание диссертации.
Структура и объем работы. Диссертационная работа состоит из введения, 7 глав, заключения, списка использованных источников из 291 наименования и приложений. Работа изложена на 285 страницах, содержит 102 рисунка и 3 таблицы.
7.4. Выводы.
В данной главе рассмотрены адаптивные системы управления электромеханическими и электромагнитными объектами такими, как маятниковая система, электромагнитный подвес, движитель автономного подводного аппарата.
Изучение свойств разработанных адаптивных систем показал, что область применения предложенных процедур расчеташире, чем это определено условиями, полученными^в главах 2, 3 и 5. Разработанные системы мало чувствительны* к ограниченным параметрическим и аддитивным возмущениям, изменяющимся в темпе с основными процессами.
Требуемое качество выходных процессов достигается при конечных значениях управляющих воздействий: В системах, обладающих требуемым качеством, относительно большие коэффициенты передачи адапторов не приводят к скачкообразным изменениям управления в переходном процессе в отличие от больших коэффициентов регуляторов робастных систем.
В случае ненулевых начальных условий в объекте способом улучшения качества процессов является изменение начальных условий в адапторе.
Введение
в адаптер элементов со статическими нелинейными характеристиками (идеальное реле) ускоряет переходные процессы в контурах настройки без повышения коэффициента передачи. ¦
В главе на основе разработанных в предыдущих главах методик предложены структуры адаптивных управляющих устройств для маятниковой системы (7.6) — (7.9), электромагнитного исполнительного устройства (7.21) — (7.23), движительного комплекса автономного подводного аппарата (7.38) — (7.40), использование которых обеспечивает малую чувствительность систем к ограниченным переменным возмущениям рассмотренных видов.
4. Разработана оригинальная методика синтеза адаптивных систем по предложенным видам модельного представления объектов, в > результате чего в канал управления вводится не более двух контуров' настройки, параметров для обеспечения заданных качественных показателей" переходных процессов в условиях ненаблюдаемых переменных возмущений различных видов;
5. Дано аналитическое обоснование и проведено имитационное исследование достижения поставленных целей функционирования адаптивных систем с разнотемповыми процессами, синтезированных по разработанным методикам. Определены условия реализуемости алгоритмов адаптации, условия устойчивости и найдены оценки времени сходимости выходных процессов синтезированных систем к желаемой, траектории при действии ограниченных переменных возмущений, найдены оценки влияния аддитивных возмущений на установившиеся ошибки и ошибки формирования управляющих воздействий, получена оригинальная аналитическая зависимость между величиной управляющего воздействия и коэффициентами эталонного уравнения, на основе которых сформулированы рекомендации по выбору параметров адаптивных систем в зависимости от условий их функционирования. Отредепешл структуры и получены рекомендации по выбору параметров фильтров, формирующих входные сигналы на систему, способствующих уменьшению величины управляющего воздействия в переходном процессе;
6. На основе разработанных методик предложены структуры адаптивных управляющих устройств для маятниковой системы, электромагнитного исполнительного устройства, движительного комплекса автономного* подводного аппарата. Свойства адаптивных систем малочувствительны к ограниченным переменным возмущениям рассмотренных видов.
Список литературы
- Агеев М.Д. Упрощенная методика расчета движителей для АЛА / Подводные роботы и их системы / Отв. ред. Л.В. Киселев- под общ. ред. М. Д. Агеева. Владивосток: Дальнаука, 1995. Вып. 6. С. 32−45.
- Аксенов Г. С., Фомин В. Н. Синтез адаптивных регуляторов на основе функций Ляпунова // Автоматика и телемеханика, 1982. № 6. С. 126−137.
- Акуленко Л.Д. Параметрическое управление колебаниями и вращениями физического маятника (качели) // Прикладная математика и механика. 1993. Т. 57. Вып. 2. С. 82−91.
- Александров А.Г. Методы построения систем автоматического управления. М.: Физматлит, 2008. 232 с.
- Александров А. Г. Оптимальные и адаптивные системы. М.: Высшая школа, 1989. 263 с.
- Андриевский Б.Р. Глобальная стабилизация неустойчивого маятника с маховичным управлением // Управление большими системами, 2009. Вып. 24. С. 258−280.
- Стабилизация перевернутого маятника с инерционным маховиком в качестве движителя / В кн.: Управление в физико-технических системах / Под ред. А. Л. Фрадкова. СПб.: Наука, 2004. С. 52−71.
- Андриевский Б.Р., Гузенко П. Ю., Фрадков А. Л. Управление нелинейными колебаниями механических систем методом скоростного градиента // Автоматика и телемеханика, 1996. № 4. С. 4−17.
- Андриевский Б.Р., Фрадков А. Л. Избранные главы теории автоматического управления с примерами на языке MATLAB. СПб.: Наука, 1999. 467 с.
- Ю.Антонов В. Н., Терехов В. А., Тюкин И. Ю. Адаптивное управление в технических системах: учеб. пособие. СПб.: Изд-во Санкт-Петербургского ун-та, 2001. 244 с.
- А.С. 1 191 883 СССР, МКИ G 05 В 13/02. Система управления нестационарными объектами / Востриков A.C., Шпилевая О .Я. Подано0902.1984. Опубликовано 15.11.1985. // Бюлл. изобрет., 1985. № 42. Приоритет от 09.01.1984.
- А.С. 568 952 СССР, МКИ G 06 g 7/18. Устройство для многократного дифференцирования аналоговых сигналов / Востриков A.C., Гаврилов Е. Б. // Открытия, изобретения, пром. образцы и товар, знаки, 1977. № 30.
- З.Афиногенова Т. Ю, Шпилевая О. Я. Нелинейное адаптивное управление нестационарными объектами // 6-й Санкт-Петербургский симпозиум по теории адаптивных систем: Сб. трудов. СПб., 1999. Т.2. С.21−23.
- И.Афиногенова Т. Ю., Шпилевая О. Я. Адаптивная система стабилизации якоря электромагнита / Сб. научных трудов НГТУ. 2000. № 2(19). С. 84−89.
- Баландина Е.С., Шпилевая О. Я. О свойствах адаптивной системы стабилизации положения якоря электромагнита // Труды V международной конеренции «Актуальные проблемы электронного приборостроения». Новосибирск: НГТУ, 2000. Т. 3. С. 163−168.
- Барбашин Е.А. Введение в теорию устойчивости. М.: Наука, 1967. 224 с.
- Бесекерский В.А., Попов Е. П. Теория систем автоматического управления. СПб: Профессия, 2004. 752 с.
- Бобцов A.A. Алгоритм робастного управления линейным объектом по выходу с компенсацией, неизвестного детерминированного возмущения // Известия РАН. Теория и системы управления, 2003. № 2. С. 93−97.
- Бобцов A.A., Николаев H.A. Синтез управления нелинейными системами с функциональными и параметрическими неопределенностями на основе теоремы Фрадкова // Автоматика и телемеханика, 2005. № 1. С. 118−129.
- Бобцов A.A., Холунин С. А. Использование последовательного компенсатора в задаче слежения неопределенным линейным объектом с компенсацией паразитного эффекта внешнего воздействия // Известия ВУЗов. Приборостроение, 2004. № 1. С. 18−25.
- Бортаковский A.C. Субоптимальное управление логико-динамическими системами в условиях параметрической неопределенности // АиТ. 2007. № 11. С. 105−121.
- Брусин В.А. Об управлении динамическими системами в условиях неопределенности // Соросовский образовательный журнал, 1996. № 6. С. 115−121.
- Брусов B.C., Тюменцев Ю. В. Синтез оптимального ансамбля нейроконтроллеров для многорежимного летательного аппарата // Сб. научн. тр. научн.-техн. конференции «Нейроинформатика-99″. Ч. 2. М.: МИФИ, 1999. С. 190−201.
- Буров A.A. О существовании и устойчивости равновесий механических систем со связями,» реализуемыми большими потенциальными силами // Прикладная математика и механика, 2003. Т. 67. № 2. С. 222−230.
- Буров A.A., Трогер X. Об относительных равновесиях орбитального маятника, подвешенного на тросе // Прикладная математика и механика, 2000: Т. 64. Вып. 5. С. 755−761.
- Васильева А.Б., Бутузов В.Ф: Асимптотические методы1 в теории сингулярных возмущений. М.: Высш. шк., 1990: 208 с.
- Вентцель Е.С. Теория вероятностей. М.: Наука, 200 Г. 565 с.
- Верещагин Н.К., Шень А. Лекции по математической логике и теории алгоритмов. Часть 1. Начала теории множеств. М.: МЦНМО, 1999. 108 с.
- Востриков A.C. Принцип построения адаптивных систем регулирования электромеханическими объектами // Автоматизированные электромеханические системы: Сб. трудов. Новосибирск: НЭТИ, 1979. С. 101−105.
- Востриков A.C. Синтез систем регулирования методом локализации. Новосибирск: НГТУ, 2007. 251 с.
- Востриков A.C. Управление динамическими объектами: учебное пособие Новосибирск: Новосиб. электротехн. ин-т. 1979. 58 с.
- Востриков A.C., Воевода A.A., Мучкин B.C. Дискретные системы автоматического управления на основе метода локализации: учебное пособие. Новосибирск: Новосиб. электротехн. ин-т. 1990. 176 с.
- Востриков A.C., Сарычев С. П. О дискретных алгоритмах управления нелинейными нестационарными объектами // Автоматизация производственных процессов. Новосибирск: НЭТИ. 1976. Вып.13.С.49−56.
- Востриков A.C., Шпилевая О. Я. Анализ устойчивости системы с вектором производных координат состояния в алгоритме адаптации // Тезисы докладов IX Международного семинара им. Е. С. Пятницкого: М.: ИПУ РАН- 2006. С. 51−52.
- Востриков A.C., Шпилевая О. Я. О разнотемповых движениях в нелинейной адаптивной системе // Вторая международная конференция по проблемам управления. Избранные труды в двух томах. М.: ИПУ. 2003. Том 1. С. 131 136.
- Востриков A.C., Шпилевая О. Я. Об одном алгоритме оценки переменных параметров динамических объектов / Деп. в ВИНИТИ 02.04.87, № 2391-В 87. 1987. Юс.
- Востриков A.C., Шпилевая О. Я. Способ построения адаптивных систем регулирования // Адаптивные системы автоматического управления: Тематический сб. научн. трудов. Киев: Ин-т кибернетики АН УССР. 1987. Вып. 15. С. 23−27.
- Габасов Р., Кириллова Ф. М., Ружицкая Е. А. Демпфирование и стабилизация маятника при больших начальных возмущениях // Известия РАН. Теория и системы управления. 2001. № 1. С. 29−38.
- Гаврилов Евг.Б. Исследование электромеханических систем стабилизации процесса шлифования с дифференцирующим фильтром в, обратной* связи: автореф. дис. канд. тех. наук. Новосибирск: НЭТИ- 1979: 18 с.
- Геращенко Е.И., Геращенко С. М. Метод разделения движений и оптимизация нелинейных систем. MC: Наука- 1975: 296 с.
- Гордон A.B., Сливинская А. Г. Электромагниты, постоянного тока. M.-JL: Госэнергоиздат, 1960. 446 с.
- Гришин A.A., Ленский A.B., Охоцимский Д. Е. и др. О синтезе управления неустойчивым объектом. Перевернутый маятник // Известия РАН. Теория и системы управления. 2002. № 5. С. 14−24.
- Дегтярев О.В., Евстифеев В. В. Модификация алгоритмов настройки параметров в градиентных самонастраивающихся системах с эталонными моделями // Автоматика и телемеханика. 1980. № 3. С. 103−112.
- Деревицкий Д.П., Фрадков А. Л. Прикладная теория дискретных адаптивных систем управления. М.: Наука, 1981. 216 с.
- Дорф Р., Бишоп Р. Современные системы управления. М.: Лаборатория Базовых Знаний, 2002. 832 с.
- Дроздов В.Н. Синтез алгоритмов цифровых систем управления для многорежимных объектов: автореферат дис.. доктора техн. наук. -Ленинград: ЛИТМО, 1989. 32 с.
- Дружинина М.В., Никифоров В. О., Фрадков А. Л. Методы адаптивного управления нелинейными объектами по выходу // Автоматика и телемеханика. 1996. № 2. С. 3−33.
- Дьяконов В.П. MATLAB 6.5 SP1/7 + Simulink 5/6. Основы применения. -М.: СОЛОН-Пресс, 2005. 800 с.
- Емельянов C.B. Системы автоматического управления с переменной структурой. М.: Наука, 1967. 336 с.
- Емельянов C.B., Коровин С. К. Новые типы обратной связи. Управление при неопределенности. М.: Наука, Физматлит, 1997. 352 с.
- Емельянов C.B., Уткин В. И., Таран В. А. Теория систем с переменной структурой / Под ред. C.B. Емельянова. М.: Наука, 1970. 592 с.
- Еремин Е.Л. Нелинейные преобразования алгоритмов прямого адаптивного управления непрерывными объектами: автореферат дис. .доктора техн. наук. Владивосток. 1994. 35 с.
- Еремин Е.Л., Цыкунов A.M. Синтез адаптивных систем управления на основе критерия гиперустойчивости. Бишкек: Илим, 1992. 182 с.
- Ефимов Д.В. Робастное и адаптивное управление нелинейными колебаниями. СПб.: Наука, 2005. 314 с.
- Жук К.Д., Тимченко A.A. Автоматизированное проектирование логико-динамический систем. Киев: Наукова думка, 1981. 212 с.
- Золотухин Ю.Н., Нестеров A.A., Ян А.П. Идентификация параметров динамической системы «автономный подводный аппарат окружающая среда».// Автометрия: 2008. № 5. С. 88−92.
- Иванов В.А., Ющенко A.C. Теория дискретных систем автоматического управления, М.: Наука, 1983. 336 с.
- Изерман Р. Цифровые системы управления. М.: Мир, 1984. 541 с.
- Казаков И.Е., Доступов Б. Г. Статистическая динамика нелинейных автоматических’систем. М.: Наука. 1962. 530 с.
- Какичев Л.Г., Солодовников В. В., Федотов А. И. Современное- состояние и методы математического описания- одного- класса логико-динамических систем./ В кн. Автоматическое управление и вычислительная техника. Вып.12.-М.: Машиностроение. 1978. С. 127−146.
- Капица П.Л. Маятник с вибрирующим подвесом // Успехи физических наук. 1951. Т. 64. С. 7−20.
- Киселев Л.В. Пространственное движение автономного подводного аппарата и задачи управления // Морские технологии / Под общ. ред. М. Д. Агеева. Владивосток: Дальнаука, 1998. Вып. 2. С.23−37.
- Клевакин В.Н. Синтез дискретных алгоритмов автоматического управления на основе метода локализации: автореферат дис.. канд. техн. наук. Новосибирск: НЭТИ, 1986. 16 с.
- Колесников Ал.А. Синергетическое управление системой «Перевернутый маятник на управляемой тележке» // Тезисы докладов VII Международного семинара «Устойчивость и колебания нелинейных систем управления». Москва: ИПУ РАН, 2002. С. 23−25
- Колесов Ю.Б., Сениченков Ю. Б. Моделирование систем: Динамические и гибридные системы: учебное пособие для вузов. СПб.: БХВ-Петербург. 2006. 224 с.
- Колмаков C.B. Разработка методов расчета и исследование электромагнитных следящих систем: автореф. дис.. канд. тех. наук. Новосибирск: НЭТИ, 1988.16 с.
- Корн Г., Корн Т. Справочник по математике для научных работников и инженеров. М.: Наука, 1977. 831 с.
- Коровин С.К., Фомичев В. В. Наблюдатели состояния для линейных систем с неопределенностью. М.: Физматлит, 2007. 224 с.
- Косолапов A.B., Шпилевая О .Я. Адаптивная стабилизация перевернутого маятника // Сб. трудов VIII Международной научно-технической конференции АПЭП-2006. Новосибирск: НГТУ, 2006. Том 7. С. 38−43.
- Костылева Н.Е., Ермолаев Ю. А., Краснов В. Н. Адаптивная система регулирования на скользящих режимах // Управление динамическими системами при неполной информации: Сб. трудов. Новосибирск: НЭТИ, 1983. С. 81−87.1. V-.U
- Крапивин B.C. Исследование квазинепрерывных систем позиционного электромагнитного привода: автореф. дис.. канд. тех. наук. Новосибирск: НЭТИ, 1977. 18 с.
- Краснова С.А. Каскадный синтез наблюдателя состояния для нелинейных систем при наличии внешних возмущений // Автоматика и телемеханика. 2003. № 1. С.31−54.
- Красовский A.A. Динамика непрерывных самонастраивающихся систем. М.: Физматгиз. 1963. 468 с.
- Красовский A.A., Буков В. Н., Шендрик B.C. Универсальные алгоритмы оптимального управления непрерывными процессами.М.:Наука, 1977. 272
- Кузовков Н.Т. Модальное управление и наблюдающие устройства. М.: Машиностроение, 1976. 184 с.
- Кузьменко A.A. Синергетический синтез нелинейных законов адаптивного управления турбиной судовой энергоустановки // Управление и информационные технологии (УИТ-2008): Доклады 5-й научной конференции. СПб.: СПбГЭТУ «ЛЭТИ», 2008. Т.2. С. 131−135.
- Кунцевич В.М. Управление в условиях неопределенности: гарантированные результаты. в задачах управлениями идентификации. Киев: Наукова Думка, 2006. 264 с.
- Кунцевич В.М., Лычак М. М. Синтез систем автоматического управления с помощью функций Ляпунова. М.: Наука, 1977. 400 с.
- Куржанский А.Б. Управление и наблюдение в условиях неопределенности. М.: Наука, 1977. 392 с.
- Лебедев A.A., Чернобровкин Л. С. Динамика полета беспилотных летательных аппаратов: М.: Машиностроение, 1973. 615 с. 93 .Левин Б. Р. Теоретические основы статистической радиотехники. М.: Советское радио. 1974. 552 с.
- Лойцянский Л. Г., Лурье А. И. Курс теоретической механики. Т.2: Динамика. М.: Наука, 1983. 596 с. 95 .Лурье Б. Я., Энрайт П.Дж. Классические методы автоматического управления. СПб.: БХВ -Петербург, 2004. 640 с.
- Матросов В.М. Метод векторных функций Ляпунова: анализ динамических свойств нелинейных систем. М.: Физматлит, 2001. 384 с.
- Мееров М.В. Синтез структур систем автоматического регулирования высокой точности, М.: Наука, 1967. 424 с.
- Методы классической и современной теории автоматического управления: учебник в 3 т. Т. 3: Методы современной теории автоматического управления / Под ред. Н. Д. Егупова. М.: Изд-во МГТУ им. Н. Э. Баумана, 2000.616 с.
- ЮО.Мирошник И. В, Никифоров В. О., Фрадков А. Л. Нелинейное и адаптивное управление сложными динамическими системами- СПб.: Наука, 2000. 549 с.
- Ю1.Мирошник И. В-, Одинец НШК. Стабилизация^ колебаний у перевернутого маятника // Науч.-техн. вестник СПГИТМО. Информ., вычис. и управл. системы / Под ред. В: Н. Васильева. СПБ.: СПГИТМО, 2004. С. 77−83.
- Многорежимные и нестационарные системы автоматического управления / Под ред. Б. Н. Петрова. М.: Наука, 1978. 238 с.
- ЮЗ.Мучкин В: С. Расчет структур дискретного управления на основе принципа- локализации / В сб. Автоматическое управление объектами с переменными-характеристиками. Новосибирск: НЭТИ, 1989, с.94−98.
- Никитин А. В-, Шишлаков В. Ф. Параметрический синтез нелинейнь1х систем автоматического управления: Монография / Под ред. В- Ф. Шишлакова- СПбГУ АП. СПб., 2003. 358 с.
- Никифоров В.О. Адаптивное, и робастное управление с компенсацией возмущений: автореферат дис.. доктора техн. наук. СПб. 2001. 27 с.
- Юб.Никифоров В. О. Адаптивное и робастное управление с компенсацией возмущений. СПб: Наука, 2003. 208 с.
- Никифоров В:0. Адаптивное управление без измерения- производных выходного сигнала//Извшузов: Приборостроение. 4.1. 1996. № 8−9. С. 5056. 4.2, 1997, № 4 С.28−33−108.0стрем К., Виттенмарк В. Системы управления с ЭВМ. М.: Мир, 1987.
- Павлов В.Н., Соловьев И. Г. Системы прямого адаптивного регулирования. М.: Наука, 1989. 136 с.
- О.Панкратов В. В. Метод синтеза робастных алгоритмов управления на основе адаптивных обратных моделей // Автоматизированные электромеханические системы: Сб. научных трудов / Под ред. В. Н. Аносова. Новосибирск: Изд-во НГТУ, 2008. С. 14−27.
- Ш. Паршева Е. А. Адаптивное децентрализованное управлениемногосвязными объектами со скалярными входом и выходом с неминимальной реализацией эталонной модели // Автоматика и телемеханика. 2005. №<8. С. 118−127.
- ПЗ.Петров Б. Н., Емельянов С. В., Уткин В. И. Принцип построения инвариантных систем автоматического управления с переменной структурой // Докл. АН СССР. 1964. Т. 154, № 6. С. 1294−1296.
- Петров Б. Н, Рутковский В. Ю., Земляков С. Д. Адаптивное координатно-параметрическое управление. М.: Наука, 1980. 244 с.
- Петров Б.Н., Рутковский В. Ю., Крутова И. Н., Земляков С. Д. Принципы построения, и проектирования самонастраиващихся систем управления. М.: Машиностроение, 1972. 259 с.
- Пб.Петров Б. Н., Теряев Е. Д., Шамриков Б. М. Условия параметрической идентифицируемости управляемых объектов в разомкнутых и замкнутых системах // Изв. АН СССР. Техническая кибернетика. 1977. № 2. С.160−175.
- Поляк Б.П., Щербаков П. С. Робастная устойчивость и управление. М.: Наука, 2002. 303 с.
- Попов В.Г. Разработка и исследование беспоисковых адаптивных систем управления с неявной эталонной моделью для многосвязных объектов. М.: Мир, 1986. 287 с.
- Попов В.М. Гиперустойчивость автоматических систем. М.: Наука, 1970. 456 с.
- Похлебаева М.С., Шпилевая О. Я. О некоторых свойствах системы стабилизации однозвенного маятника Фуруты // Научный вестник НГТУ. Новосибирск: НГТУ, 2007. № 4(29). С. 43−54.
- Приспосабливающиеся автоматические системы / Под ред. Э. Мишкина, Л. Брауна. М.: ИЛ, 1963. 670 с.
- Прокопов Б.Н. О синтезе адаптивных систем с эталонной моделью прямым методом Ляпунова // Известия АН СССР. Техническая кибернетика. 1974. № 2. С. 167−172.
- Пугачев B.C., Казаков И. Е., Евланов Л. Г. Основы статистической теории автоматических систем. М.: Машиностроение, 1974. 400 с.
- Путинцев В.А., Ядыкин И. Б. Нелинейные алгоритмы адаптации для многосвязных динамичесских объектов // Автоматика и телемеханика. 1980. № 6. С. 85−95.
- Путов В.В. Методы построения адаптивных систем управления нелинейными нестационарными динамическими объектами с функционально-параметрической неопределенностью: автореф. дис.. д-ра техн. наук. СПб.: СПбГЭТУ, 1993. 34 с.
- Путов В.В., Полушин И. Г. Метод мажорирующих функций в задачах адаптивного управления нелинейными объектами // Известия ГЭТУ. Сб. науч. трудов. Вып. 513. СПб., 1998. С.19−25.
- Растригин JI. А. Адаптация сложных систем. Рига: Зинатне, 1981. 375 с.
- Решмин С.А., Черноусько Ф. Л. Оптимальный по быстродействию синтез управления нелинейным маятником // Известия РАН. Теория и системы управления.2007. № 1.С. 13−22.
- Рубан А.И. Адаптивное управление с идентификацией. Томск. Изд-во: Томск. Ун-та, 1983.135 с.
- Сабинин О.Ю., Фуралева Ю. А. Система сетевого моделирования логико-динамических процессов с интерфейсом на естественном языке // Приборы и системы. Управление, контроль, диагностика. М.: Научтехлитиздат, 2000. № 5. С.5−7.
- Саблина Г. В. Разработка и исследование методики стабилизации объекта управления «каретка маятник»: автореф. дис.. канд. техн. наук. Новосибирск: НГТУ, 2000. 17 с.
- Сарычев С.П. Стабилизация динамических свойств электроэнергетических объектов на основе управления по вектору скорости: автореф. дис. канд. техн. наук. Новосибирск: НЭТИ, 1985.18 с.
- Свешников A.A. Прикладные методы теории случайных функций. М.: Физматлит, 1968. 464 с.
- Сикирда Ю.В., Шмелева Т. Ф. Интегрированная адаптивная система управления воздушным движением во внештатных полетных ситуациях // Научно-теоретический журнал «Искусственный интеллект», 2003. №.4. С. 365−372.
- Смирнов Н.В. Синтез гибридного идентификатора полного порядка в задаче многопрограммной стабилизации // Автоматика и телемеханика. 2006. № 7. С. 41−52.'
- Соколов В.Ф. Адаптивное робастное управление дискретным скалярным объектом в /j-постановке // Автоматика и телемеханика. 1998. Т. 59, № 3. С. 107−131.
- Солодовников В.В., Коньков В. Г. Корневые методы анализа систем автоматического регулирования. М.: МВТУ, 1986. 60 с.
- Солодовников В.В., Коньков В. Г., Суханов В. А., Шевяков О. В. Микропроцессорные системы автоматического регулирования. Основы теории и элементы: учебное пособие. М.: Высш. шк., 1991. 255 с.
- Солодовников В.В., Шрамко JI.C. Расчет и проектирование аналитических самонастраивающихся систем с эталонной моделью. М.: Машиностроение, 1972. 270 с.
- Срагович В.Г. Адаптивное управление. М. Изд-во: Наука, 1981. 384 с.
- Теличенко Д. А. Адаптивные системы управления с эталонным упредителем для объектов с различными типами запаздывания: автореферат дис. канд. техн. наук. Хабаровск. 2006. 20 с.
- Тер-Акопов А. К. Динамика быстродействующих электромагнитов. М.-Л.: Энергия, 1965. 167 с.
- Теряев Е.Д., Шамриков Б. М. Цифровые системы и поэтапное адаптивное управление. М.: Наука, 1999. 330 с.
- Тимофеев A.B. Построение адаптивных систем управления программным движением. JI. Изд-во: Энергия, 1980. 88 с.
- Тихонов А.Н. Системы дифференциальных уравнений, содержащие малые параметры при производных // Математический сборник. 1952. Т.31, № 3. С. 575−586.
- Тюкин И.Ю., Терехов В. А. Адаптация в нелинейных динамических системах. M.: Editorial URSS, 2008. 384 с.
- Управление в физико-технических системах / Под ред. A.JI. Фрадкова. СПб: Наука, 2004. 272 с.
- Уланов Г. М. Регулирование по возмущению. Компенсация возмущений и инвариантность. M.-JL: Госэнергоиздат, 1960. 110 с.
- Уткин В.И. Скользящие режимы в задачах оптимизации и управления. М.: Наука, 1981. 368 с.
- Фельдбаум A.A. О распределении корней характеристического уравнения // Автоматика и телемеханика. 1948. № 4. С.253−279.
- Фельдбаум A.A. Простейшие релейные системы автоматического регулирования // Автоматика и телемеханика. 1949. Т. 10. С. 249−266.
- Филаретов В.Ф., Лебедев A.B., Юхимец Д. А. Устройства и системы управления подводных роботов. М.: Наука., 2005. 270 с.
- Флюгге-Лотц И'. Метод фазовой плоскости в теории релейных систем. М.: Физматгиз, 1959. 176 с.
- Фомин В.Н., Фрадков А. Л., Якубович В. А. Адаптивное управление динамическими объектами. М.: Наука, 1981'. 448 с.
- Формальский A.M. О стабилизации перевернутого маятника с неподвижной или подвижной точкой подвеса // ДАН. 2006. Т. 406. № 2. С. 175−179.
- Фрадков А.Л. Адаптивное управление в сложных системах: беспоисковые методы. М.: Наука, 1990. 296 с.
- Харитонов В.Л. Об асимптотической устойчивости положения равновесия семейства систем линейных дифференциальных уравнений // Дифференциальные уравнения. 1978. Т. 14. № 11. С. 2086−2088.
- Холунин С.А. Адаптивное и робастное управление по выходу линейными неопределенными системами: автореферат дис.. канд. техн. наук. С. Петербург, 2006. 16 с.
- Цыпкин Я.З. Адаптация и обучение в автоматических системах. М.: Наука, 1968.400 с.
- Цыпкин Я.З. Основы теории обучающихся систем. М.:Наука, 1970.251 с
- Шокин Ю.И., Юлдашев З. Х. К задаче управления в интервальных логико-динамических системах // Вычислительные технологии. 1997. Т.2, № 5. 9196 с.
- Шпилевая О.Я. Адаптивная система стабилизации одноканального логико-динамического объекта // Проблемы управления и моделирования в сложных системах: труды IX Международной конференции. Самара: изд-во Самарского научного центра РАН, 2007. С.220−224.
- Шпилевая О.Я. Адаптивная система стабилизации с фильтром оценки производных // Автоматика 2008 / Доклады XV международной конференции по автоматическому управлению. Одесса: ОНМА, 2008. С. 667−670.
- Шпилевая О.Я. Адаптивные системы с эталонными моделями: учебное пособие. Новосибирск: НГТУ, 2007. 103 с.
- Шпилевая О.Я. Анализ качества процессов в адаптивной системе стабилизации динамических характеристик // Автоматическое управление объектами с переменными характеристиками / Межвуз. сб. научн. тр. Новосибирск: НГТУ, 1993. С. 54−64.
- Шпилевая О.Я. Исследование процессов адаптации в системе компенсации возмущений методом разделения движений // Автоматическое управление объектами с переменными характеристиками: Сб. трудов. Новосибирск: изд-во НЭТИ, 1989. С. 67−72.
- Шпилевая О.Я. Модели переключаемых систем // Теория активных систем / Труды международной научно-практической конференции. М.: ИЛУ РАН, 2009. Т. 1.С. 168−171.
- Шпилевая О.Я. Об одном алгоритме адаптивного управления механическими системами // Восьмой. Всероссийский съезд по теоретической и прикладной механике/Тез. Докладов. Пермь, 2001. С. 614.
- Шпилевая О.Я. Об одном способе уменьшения порядка адаптивного регулятора// Автометрия. 2006. Т. 42, № 2. С. 38−48.
- Шпилевая О.Я. Применение вектора скорости в алгоритме адаптации, систем стабилизации // Микропроцессорные системы автоматики: материалы III Международной научно-технической конференции. Новосибирск: НГТУ, 1996. С. А-44 А-46.
- Шпилевая О.Я. Робастное адаптивное управление на основе принципа локализации // Аналитическая теория автоматического управления и ее приложения / Сб.тр. Междунар. научн. конференции под ред. В. А. Подчукаева. Саратов, 2000. С. 169−173.
- Шпилевая О.Я. Синтез адаптивного регулятора для одного класса переключаемых систем // Устойчивость и колебания нелинейных систем управления / Тезисы докладов X Международного семинара им. Е'.С. Пятницкого. М.: Изд-во ИГТУ РАН, 2008. С. 366−367.
- Шпилевая О.Я. Синтез адаптивных регуляторов низкого порядка для одноканальных систем стабилизации // Тезисы III Международной конференции по проблемам управления. М.: Изд-во ИПУ, 2006. С.51−52.
- Шпилевая О.Я. Система стабилизации с сигнальной настройкой / Технология и конструирование в электронной аппаратуре. 2008. № 2. С. 1720.
- Шпилевая О.Я. Системы стабилизации динамических характеристик с вектором скорости в алгоритме адаптации: автореф. дис.. канд. техн. наук. Новосибирск. 1990. 18 с.
- Шпилевая О.Я. Способ построения системы автоматического управления с вектором скорости в законе адаптации // Автоматическое управление объектами с переменными характеристиками: Сб. трудов. Новосибирск: изд-во НЭТИ, 1986. С. 71−77.
- Шпилевая О .Я. Стабилизация динамических характеристик на основе принципа адаптации // Электронная техника. М.: ЦНИИ «Электроника», 1993. Сер.7. Вып.2(17 7) 3 (178). С. 10−13.
- Шпилевая О .Я. Стабилизация маятниковой установки на основе принципа локализации / Мехатроника, автоматизация, управление 2007 // Материалы Международной научно-практической конф. Таганрог-Москва: изд-во ТТИ ЮФУ, 2007. С. 307−312.
- Шпилевая О.Я. Условия разрешимости задачи синтеза адаптивной системы регулирования // Автоматическое управление объектами с переменными характеристиками / Межвуз. сб. научн. тр. Новосибирск: НГТУ, 1991. С. 28−33.
- Шпилевая О.Я., Афиногенова Т. Ю. Адаптивное управление на основе принципа локализации // Сб. трудов Первой международной конференции по мехатронике и робототехники «МИР 2000″. СПб.: НПО Омега БФ Омега, 2000. Т.2. 385−387.
- Шпилевая О.Я., Афиногенова Т. Ю. О сходимости процессов в дискретной адаптивной системе // Информационные системы и технологии: труды международной научно-технической конференции. Новосибирск: НГТУ, 2000. Т. 2. С. 355−360.I
- Шпилевая О.Я., Мальцев A.C. Об адаптивной стабилизации переключаемой системы//Научный вестник НГТУ.2008.№ 3 (33).G.188−192
- Шпилевая О. Я, Шалаев А. И: Разработка* системы управления движением подводного аппарата//Научный вестник НГТУ. 2009. № 3 (57). С. 23−30.
- Юркевич В.Д. Синтез, нелинейных, нестационарных систем управления с разнотемповыми процессами. СПб: Наука- 2000. 288 с.
- Юркевич В.Д. .Условия, реализуемости заданных движений и синтез систем с вектором скорости в законе управления: автореф. дис. .канд. техн. наук. Новосибирск. 1986. 18 с. ' '
- Ядыкин И.Б. Адаптируемость регулятора и двухуровневые алгоритмы настройки параметров адаптивных систем управления // Автоматика и телемеханика. 1983. № 5. С. 99−110.
- Ядыкин И.Б., Шумский В. М., Овсепян Ф. А. Адаптивное управление непрерывными- технологическими- процессами., М: Изд-во: Энергоатомиздаг, 1985. 240 с.
- Adaptive Control Systems / Edited by Feng G. & Lozano R. Newnes, 1999.
- Af!nogenova T.Yu., Shpilevaya O. Ya. Choice of Discrete Adaptive Regulator Parameters / Proc. of the 6-th International Scientific-Technical conference (APEIE-2002). Novosibirsk: NSTU. 2002. Vol.1. P. 126−131.
- Afinogenova T.Yu., Shpilevaya O. Ya. Non-linear discrete-time adaptive control algorithm for time-varying plans / Proc. of the 4th International Scientific Technical conference (APEIE-98). Novosibirsk: NSTU. 1998.Vol.1. P. 376−379.
- Akgul M. Analysis and design of switching and fuzzy systems: PhD thesis, Bilkent university, 2002. 312 c.
- Ambrosino J., Calentano J., Garofalo F. Variable structure model reference adaptive control systems // Int. J. Contr. 1984. Vol. 39. № 6. P. 1339−1349.
- Anderson D.O.», Bitmead R.R., Johnson" C.RJr., Kokotovic P.V. Stability-of Adaptive Systems: Passivity and Averaging Analysis // The Mit Press Series in Signal Processing, Optimization, and Control, No 8, 1986.
- Anderson D.O., Brinsmead T., Liberzon D., Morse A. S. Multiple model adaptive control with safe switching // Int. J. Adapt. Control Signal Process. 2001. P. 445−470.
- Asher R. B, Andrisani D., Dorato P. Bibliography on adaptive control systems // Proc. of the IEEE, Aug., 1976. Vol. 64. Issue 8- P.1226- 1240.
- Babitrino A., De Maria G., Zinober A.S.I. Nonlinear adaptive model-following control // Automatica, 1984. Vol.20. № 5.P. 559−568.
- Branicky M. S. Multiple Lyapunov functions and other analysis tools for switched and hybrid systems // Trans, on Automatic Control, 1998. Vol. 43. № 4. P. 475−482.
- Branicky M.S. Stability of switched and hybrid systems // Proc. of the 33rd IEEE Conf. on Decision & Control, 1994.Vol. 4. P. 3498−3503.
- Branicky M. S., Borkar V. S., Mitter S. K. A unified framework for hybrid control: Model and optimal control theory // Trans, on Automatic Control, 1998. Vol. 43, P. 31−45.
- Brockett R.W. Asymptotic stability and feedback stabilization / In Differential Geometric Control Theory / R.W. Brockett et al, eds. Birkhauser, Boston, 1983. P. 181−191.
- Chien C.J., Fu L.C. A new approach to model reference control for a class of arbitrarily fast time-vaiying unknown plants //Automatica, 1992. Vol.28. № 2. p. 437−440.
- Davrazos G., Koussoulas N. T. A review of stability results for switched and hybrid systems. / URL: http://med.ee.nd.edu/MED9/Papers/Hybridsystems /med01−169.pdf. 8 p.
- Dayawansa W.P., Martin C.F. A converse Lyapunov theorem for a class of dynamical systems which undergo switching // IEEE Trans. Automat. Control, 1999. Vol. 44. P. 751−760.
- Ernest P., Horacek P. Algorithms for control of a rotating pendulum // In-Proc. Conference MED'03. Athens: National Technical University. 2003. P. 23−25.
- Fan J.C., Kobayashi T. Simple adaptive PI controller for linear system with constant disturbances // IEEE Trans. Automat. Control, 1998. V. AC-43. № 5. P. 733−736.
- Feng G. Variable structure model reference adaptive control with integration //Int. J. Adaptive Control and Signal Processing, 1998. Vol.10. № 4−5. P. 489 497.
- Fu M., Ross B. B. Adaptive Stabilization of Linear Systems Via Switching Control // IEEE Transactions on Automatic Control, 1986. Vol. AC-31. № 12. P. 1097−1103.
- Gurvits L. Stability of discrete linear inclusion / Lin. Alg. Appl. 1995. Vol.23. P. 47−85.
- Hespanha J. P., Liberzon D., Morse A. S. Overcomingthe limitations of adaptive control by means of logic-based switching. Systems &. Control Letters. 2003.49. P. 49−65.
- Hespanha J. P., Liberzon D., Morse A. S. Logic-based switching control of a nonholonomic system with parametric modelling uncertainty // Systems & Control Letters. 1999. Vol. 38. P. 167−177.
- Hespanha J., Liberzon D., Morse A. S., Anderson B. D. O., Brinsmead T. S., De Bruyne F. Multiple model adaptive control. Part 2: switching // Int. J. Robust Nonlinear Control, 2001. Vol. 11, pp. 479−496.
- Hespanha J. P., Morse A. S. Stabilization of nonholonomic integrators via. logic-based switching // Automatica, 1995. Vol. 35. P. 385−393.
- Ioannou P.A., Kokotovic P.V. Adaptive systems which reduced models
- Jiang Z.P. A note on robust adaptive output feedback control // Preprints of the 4th IF AC Nonlinear control systems design symposium, 1998. Vol 1'. 19−24.
- Jiang Z.P., Praly L. Iterative designs of adaptive controllers for systems with nonlinear integrators // Proc. 30-th IEEE Conf. Dec. Control. Brighton, 1991. P. 1100−1120.
- Kanellakopoulos I., Kokotovic P.V., Morse AiS. Systematic design of adaptive controllers for. feedback linearizable systems // IEEE Trans. Automat. Control. 1991. Vol. 36.№ 11. P. 1241−1253.
- Kaufman H., Bar-Kana I., Sobel K. Direct adaptive-control algorithms. New. York: Springer-Verlag, 1994. 424 p.
- Kokotovic P.V., O’Malley R.E. Singular Perturbation and Order Reduction in Control-Theory. An overview // Automatica, 1966. Vol.12. P.123−132.
- Krstic M., Kanellakopoulos I., Kokotovic P. Adaptive nonlinear control without overparametrization // Systems and Control Letters, 1992. Vol. 19. № 3. P.177−185.
- Kulkarni S.R., Ramadge P.J. Model and controller selection policies based on prediction errors // IEEE Trans. Automat. Control, 1996. Vol. 41. P. 1594−1604.
- Liberzon D. Stabilizing a linear system with finite-state hybrid output feedback // Proc. 7th Mediterranean Conf. on Control and Automation (MED99), 1999. P. 176−183.
- Liberzon D., Morse S. Basic Problems in Stability and Design of Switched Systems // IEEE Control System Magazine, 1999. Vol. 19. P. 59−70.
- Liu X.-L., Duan G.-R. Robust H" output dynamic compensator for switched systems // Proc. 2-d IASTED International Multi-Conf. on Automation, Control, and Information Technology. Novosibirsk, 2005. P. 237−241.
- Liu X.-L., Duan G.-R. L2- synthesis for switched systems using output dynamic compensator // Proc. 2-d IASTED International Multi-Conf. on Automation, Control, and Information Technology. Novosibirsk, 2005. P. 231−236.
- Maciejowski J.M. Multivariable feedback design. Addison-Wesley, Reading, MA. 1989.
- Mancilla-Aguilar J.L. A condition for the stability of switched nonlinear systems // IEEE Trans, on Automatic Control, 2000. Vol. 45. P. 2077−2079.
- Miller D. E. A new approach to model reference adaptive control // IEEE Trans, on Automatic Control, 2003. Vol. 48. 5. P. 743 757.
- Molchanov A.P., Pyatnitskii E. S. Criteria of asymptotic stability of differential and difference inclusions encountered in control theory // Systems & Control Letters, 1989. № 13. P. 59−64.
- Morse A.S. Supervisory control of families of linear set-point controllers, part 1: Exact matching // IEEE Trans. Automat. Control, 1996. Vol. 41. № 10. P. 1413−1431.
- Morse A. S. Supervisory control of families of linear set-point controllers-part 2: Robustness // IEEE Trans, on Automatic Control, 1997.Vol. 42. P. 1500−1515.
- Morse A. S., Mayne D. Q., Goodwin G. C. Application of hysteresis switching in parameter adaptive control // IEEE Trans, on Automatic Control. 1992, Vol. 37. № 9. p. 1343−1354.
- Narendra K.S., Balakrishnan J. Adaptive control using multiple models // IEEE Trans. Automat. Control, 1997. Vol. 42. № 2. P. 171−187.
- Narendra K. S., Balakrishnan J. A common Lyapunov function for stable LTI systems with commuting A-matrices // Trans, on Automatic Control. 1994. Vol. 39. № 12. P. 2469−2471.
- Narendra K.S., Lin Y.-H., Valavani L.S. Stable adaptive controller design. Part II: proff of stability // IEEE Trans, on Automat. Control. 1980. V. 25. № 3. P. 440−448.
- Narendra K.S., Valavani L.S. A comparison of Lyapunov’s and hyperstability approaches to adaptive control of continues systems // IEEE Trans. Automat. Confer. 1980. AC-25. № 2. P. 243−247.
- Patent US 3 654 444 G06 °F 15/46 U.S. CI. 235/151.1. Adaptive controller / Gurol I.M. // URL: http://www.freepatentsonline.com/5 023 808.pdf. Date of patent 04.04.1972.
- Patent US 5 023 808 G06 °F 15/46 U.S. CI. 364/513. Dual-arm manipulators with adaptive control / Seraji H. // URL: http://www.freepatentsonline.com/ 5 023 808.pdf. Dateofpatent 11.06.1991.
- Patent US 6 264 111 B1 G05B 13/02 U.S. CI. 236/51. Proportional-integralderivative controller having adaptive control capability / Nicolson J.C., Schuster M. // URL: http://www.freepatentsonline.com/6 264 111.html. Date of patent 24.07.2001.
- Saksena V.R., O’Reilly J., Kokotovic P.V. Singular Perturbation and Time-scale Methods in Control Theory Survey 1976−1983 // Automatica. 1984. Vol.20. № 3. P.273−293.
- Sastry S.S., Isidori A. Adaptive Control of Linearizable Systems // IEEE Trans. Automatic Control. 1989. Vol. AC-34- № 11. P. 1123−1131.
- Savkin A.V., Petersen I. R., Skafidas E., Evans R. J. Hybrid dynamical systems: Robust control synthesis problems // System Control Letter. 1996. Vol. 29, № 2. P. 81−90:
- Shorten R. N., Narendra- K. S. On the stability and existence of common Lyapunov functions for stable linear switching systems // Proc. 37th IEEE Conf. on Decision and.Control. 1998. VoL.4. P. 3723−3724.
- Shpilevaya 0/ Adaptive Control System with Piece-Wise Perturbations // Preprints of 13 th IF AC Symposium on- Information Control Problems in Manufacturing. Moscow. 3−5 June, 2009. P. 361−366.
- Shpilevaya O. Design and stability of adaptive switched system.// Proceedings 6-th Euromech Nonlinear Dynamics Conference. June 30- July 4, Saint Petersburg, Russia, 2008. 3 p.
- Shpilevaya O.Y. Control systems with low-order adaptive regulators// Modelling, Identification and. Control. Proc. of the LASTED Intern. Conf. Novosibirsk, Russia. 2005. P. 293−296.
- Shpilevaya O. Ya. Design of control, systems with adaptive regulator // Proc: The 3rd International IEEE Scientific Conference on Physics and Control, Published by Universita tsverlag Potsdam, 2007. P. 141.
- Skafidas Е., Evans R. J., Savkin А. V., Petersen I. R. Stability results for switched controller, systems // Automatica. 1999. Vol. 35. P. 553−564.
- Solak E. Observability and? Observers for Nonlinearand- Switching- Systems. PhD thesis, Bilkent University, 2001. 178 p.
- Tao G. Adaptive control design and analysis. New Jersey: Wiley-Interscience, 2003.618 р.
- Tong S-C., Tang J., Wang T. Fuzzy adaptive control of multivariable nonlinear systems // Fuzzy Sets and Systems. 2000. Vol. .111. 153−167.
- UtkimV.E, Vostrikov A. SIControPsystems with decoupling motions //Preprints 1th IFAC Word Congress. Finland. 1978. Vol. 2. P. 967−973-
- Vostrikov A.S., Shpilevaya O.Y. Adaptive control systems with two-scale motions // Physics and Control. Proc. of the Intern. Conf. Saint Petersburg. 2005. 799−804.
- Vostrikov A.S., Shpilevaya O.Ya. Nonlinear Control Systems with Fast Adaptive Algorithm // Proceedings of the IASTED International Conf. Modelling, Identification, and Control. Switzerland. 2004. P. 444−449.
- Vu L., Chatterjee D., Liberzon D. Input-to-state stability of switching systems and switching adaptive control // Automatica. 2007. Vol. 43, № 4, P. 639−646.
- Whitaker H.P., Yamrom J., Kezer A. Design of model reference adaptive control systems for aircraft // Massachuset Technol. Instrum. Lab. Rept. 1958. № R-164.
- Wicks M.A., Peleties P., DeCarlo R.A. Switched controller synthesis for the quadratic stabilization of a pair of unstable linear systems // European J. Control. 1998, Vol. 4. P. 140−147.
- Yurkevich V.D. Robust two-time-scale discrete-time system design // Proc. of the 14th IF AC World Congress, Beijing, P.R. China. Vol. G. P. 343−348.
- Zefran M., Burdick J.W. Design of switching controllers for systems with changing dynamics // Proc. 37th Conf. on Decision and Control. 1998.- Vol. 2, № 16−18. P. 2113−2118.
- Zhai G., Lin H., Antsaklis P. J. Quadratic stabilizability of switched linear systems of linear systems with polytopic uncertainties // Int. J. Control. 2003. 76, (7). P. 747−753.