Разработка и анализ алгоритмов цифровой обработки сигналов в задаче оптической лазерной триангуляции
Лазер, точка падения лазера на поверхности объекта и регистрирующая видеокамера образуют в пространстве треугольник, зная параметры которого можно вычислить расстояние до облучаемого лазером участка поверхности сканируемого объекта, поэтому данный метод назван триангуляций (от латинского «triangulum» — треугольник). Метод триангуляции известен с древних времен и использовался для геодезических… Читать ещё >
Содержание
- 1. МОДЕЛЬ ФОРМИРОВАНИЯ ЦИФРОВОГО ИЗОБРАЖЕНИЯ В ОПТИЧЕСКОЙ СИСТЕМЕ ВИДЕОКАМЕРЫ
- 1. 1. Вводные замечания
- 1. 2. Модель формирования цифровых изображений на основе перспективной проекции
- 1. 2. 1. Аффинные преобразования в трехмерном пространстве
- 1. 2. 2. Перенос
- 1. 2. 3. Масштабирование
- 1. 2. 4. Поворот
- 1. 2. 5. Поворот вокруг произвольной оси
- 1. 2. 6. Модель камеры
- 1. 2. 7. Матрица перспективной проекции
- 1. 2. 8. Прямоугольная и слабая перспективная проекции
- 1. 3. Алгоритм Левенберга-Марквардта
- 1. 3. 1. Постановка задачи
- 1. 3. 2. LMA как комбинация простейшего градиентного метода и метода Гаусса-Ньютона
- 1. 3. 3. LMA как метод доверительных интервалов
- 1. 4. Краткие
- выводы
- 2. РЕШЕНИЕ ЗАДАЧИ КАЛИБРОВКИ ЦИФРОВОЙ ВИДЕОКАМЕРЫ
- 2. 1. Вводные замечания
- 2. 2. Обработка цифровых изображений в задаче калибровки видеокамеры
- 2. 2. 1. Процедура распознавания калибровочных полос
- 2. 2. 2. Преобразование Хафа для обнаружения линий на цифровом изображении
- 2. 2. 3. Автоматический анализ аккумулятора преобразования Хафа
- 2. 2. 4. Обнаружение непрерывных линий
- 2. 2. 5. Отбор корректных пар прямых
- 2. 2. 6. Анализ штрихового кода линий
- 2. 2. 7. Генерация возможных кодовых последовательностей
- 2. 2. 8. Автоматическое определение интервала дискретизации кодовой последовательности
- 2. 2. 9. Надежность обнаружения линий
- 2. 2. 10. Повышение быстродействия преобразования Хафа
- 2. 3. Вычисление положения цифровой видеокамеры методом Левенберга-Марквардта
- 2. 4. Точность определения координат видеокамеры
- 2. 5. Краткие
- выводы
- 3. ВЫЧИСЛЕНИЕ ТРЕХМЕРНЫХ КООРДИНАТ ТОЧЕК ОБЪЕКТА ПО ДВУМЕРНЫМ ЦИФРОВЫМ ИЗОБРАЖЕНИЯМ
- 3. 1. Вводные замечания
- 3. 2. Предварительная цифровая обработка кадров входной видеопоследовательности
- 3. 2. 1. Предварительная фильтрация
- 3. 2. 2. Получение разностного кадра
- 3. 2. 3. Цифровая обработка изображений разностных кадров методом анализа гистограмм
- 3. 3. Решение задачи обнаружения гауссова видеоимпульса на цифровом изображении
- 3. 3. 1. Оптимальные методы
- 3. 3. 2. Аппроксимирующие методы
- 3. 4. Аппроксимация набора точек плоскостью
- 3. 5. Вычисление трехмерных координат точек поверхности объекта
- 3. 6. Анализ погрешностей, возникающих в системе
- 3. 7. Метод пространственно-временной обработки
- 3. 7. 1. Разработка алгоритма применения пространственно-временной обработки в разрабатываемой системе
- 3. 7. 2. Анализ результатов работы метода
- 3. 8. Краткие
- выводы
- 4. ЦИФРОВАЯ ОБРАБОТКА РЕЗУЛЬТАТОВ СКАНИРОВАНИЯ
- 4. 1. Вводные замечания
- 4. 2. Преобразование облака точек в карту высот
- 4. 3. Триангуляция Делоне
- 4. 4. Наложение текстуры
- 4. 5. Совмещение результатов сканирования
- 4. 5. 1. Метрика точка-точка
- 4. 5. 2. Поиск решения методом наименьших квадратов
- 4. 5. 3. Метрика точка-плоскость
- 4. 5. 4. Сравнение метрик точка-точка и точка-плоскость
- 4. 6. Анализ получаемых моделей
- 4. 6. 1. Анализ качества пайки элементов поверхностного монтажа
- 4. 6. 2. Анализ форм деталей
- 4. 6. 3. Согласование форм
- 4. 7. Фильтрация выходных моделей
Разработка и анализ алгоритмов цифровой обработки сигналов в задаче оптической лазерной триангуляции (реферат, курсовая, диплом, контрольная)
Актуальность темы
.
В настоящее время трехмерные модели объектов широко используются в различных областях человеческой деятельности — в науке и технике, медицине, системах виртуальной реальности, обучении и искусстве. Современное машиностроение сл’ожно представить без систем автоматического проектирования (САПР), наиболее полно использующих потенциал трехмерного моделирования для разработки и производства деталей и механизмов. Следующий качественный этап развития цифрового телевидения — переход на стереоскопические технологии, использующие трехмерные модели объектов. Бесконтактное измерение геометрических параметров объектов — один из основных методов ряда отраслей науки и техники, таких как дефектоскопия, технический контроль, метрология [1−3].
Во многих задачах, использующих трехмерное моделирование, возникает необходимость в получении трехмерных моделей реально существующих объектов. В таком случае требуется технология сканирования реального объекта (печатной платы, корпуса прибора, человеческого лица, здания, деталей механизмов и т. д.) для получения виртуальной трехмерной модели, представляющей собой цифровое геометрическое приближение его формы. Существует несколько методов такого сканирования, самый распространенный из них — оптическая лазерная триангуляция [4−9].
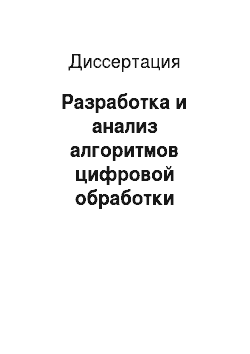
На практике оптическая лазерная триангуляция — один из самых точных и быстрых способов получения трехмерных моделей реальных предметов [10−14]. Она является одним из методов лазерной дальнометрии. Метод оптической лазерной триангуляции основан на освещении объекта лазерным лучом и регистрации отраженного от объекта излучения с помощью ПЗС/КМОП-матрицы или иного регистрирующего оборудования. В наиболее распространенном случае форма объекта определяется путем вычисления координат точек линии, образованной проекцией растянутого в линию лазерного луча на сканируемый объект при условии пространственного разнесения лазера и регистрирующей видеокамеры [15−17]. В таком случае лазерная линия будет повторять форму объекта в точке падения (рис. 1). Зная информацию о взаимном расположении источника лазерного излучения и регистрирующей видеокамеры, возможно вычисление реальных трехмерных координат точек поверхности сканируемого объекта путем обработки изображений, поступающих с видеокамеры. Полная модель сканируемого объекта получается путем смещения лазерной линии вдоль всей его поверхности.
Рис. 1, Принцип работы системы оптической лазерной триангуляции: 1) сканируемый объект- 2) лазер с цилиндрической линзой- 3) лазерный луч- 4) картинная плоскость видеокамеры- 5) проекция лазерного луча на картинную плоскость видеокамеры, повторяющая форму объекта.
Лазер, точка падения лазера на поверхности объекта и регистрирующая видеокамера образуют в пространстве треугольник, зная параметры которого можно вычислить расстояние до облучаемого лазером участка поверхности сканируемого объекта, поэтому данный метод назван триангуляций (от латинского «triangulum» — треугольник). Метод триангуляции известен с древних времен и использовался для геодезических задач, оценки расстояния до плавучих объектов и т. д. В пассивной триангуляции для вычисления координат используется только зрительное определение азимута до интересующего объекта. Позже появились методы активной триангуляции — на объект направлялся луч света с известным углом относительно положения наблюдателя. При применении источника света (в т.ч. лазера) в задаче 2 5 4 триангуляции измерения ведутся в видимом диапазоне, поэтому данный метод получил название оптической триангуляции. Следует отметить, что триангуляционные измерения могут приводиться так же в СВЧ-диапазоне или с использованием звуковых волн. Например, с помощью триангуляционных методов радиолокации в СВЧ-диапазоне космическими аппаратами возможно получение карт рельефа планет солнечной системы.
С появлением лазеров метод оптической триангуляции получил качественный скачок. Узкий спектр и малое расхождение лазерного пучка позволили значительно повысить точность, а так же расширить диапазон измеряемых расстояний в триангуляционных измерениях. Когерентные свойства лазерного излучения позволяют использовать его для триангуляционных измерений в диапазоне от десятков километров до нанометрового диапазона.
Для оценки расстояния до объекта в задаче оптической лазерной триангуляции можно использовать линейный ПЗС (или КМОП) сенсор для определения положения лазерного пятна [18]. Однако для задачи сканирования формы объекта более эффективным является метод определения положения точек лазерной полосы на двумерном изображении (в отличие от лазерного пятна на линейном сенсоре), поэтому в качестве регистрирующего элемента должна использоваться двумерная решетка регистрирующих элементов, например, в составе цифровой регистрирующей видеокамеры. В связи с этим в данной работе в качестве входных данных рассматривается последовательность цифровых изображений, снимаемых регистрирующей видеокамерой [19].
Для получения координат точек необходимо первоначально вычислить координаты и параметры видеокамеры (произвести ее калибровку) [20−22], т. е. решить задачу определения ее местоположения в пространстве [23, 24]. В большинстве существующих систем для этого используется объединение лазера и видеокамеры в единый блок, в такой системе взаимное расположение лазера и видеокамеры известно изначально, а для позиционирования видеокамеры относительно сканируемого объекта используются дорогостоящие координатно-измерительные машины.
Однако возможна и более гибкая схема построения устройства, в которой жесткая связь между лазером и видеокамерой отсутствует, их взаимное положение произвольно, отсутствует так же и координатно-измерительная машина. В такой системе вся информация о положении и параметрах видеокамеры в каждый момент времени должна быть получена только путем анализа цифровых изображений, снимаемых самой видеокамерой-, то есть информация, ранее получаемая путем с использованием координатно-измерительных машин, должна получаться путем цифровой обработки изображений. Данная задача должна быть решена с достаточной точностью даже в условиях низкого качества входных изображений, так как ошибки на этапе определения местоположения видеокамеры ведут к ошибкам1 во всей результирующей модели.
Далее, путем цифровой обработки изображений с видеокамеры необходимо произвести также и обнаружение луча лазера. Данные, получаемые видеокамерой, кроме полезного цифрового* изображения лазерного луча содержат различные виды шума, паразитных засветок, искажений формы луча. От точности и эффективности определения положения лазерного луча зависит точность всего метода сканирования. Данной задаче, принадлежащей к классу задач выделения импульса на фоне шумов, посвящено множество фундаментальных работ по статистической радиотехнике: Тихонова В. И. [26], Репина В. Г. и Тартаковского Г. П. [27], Вайнштейна JT.A. [28], УайлдаД.Дж. [29]. Методам определения импульсов с гаусоподобной структурой уделяется также внимание в работах Краснова В. Н [30], ЧураковаЕ.П. [31], Трифонова А. П. [32], Пальчика О. В. [34] и зарубежных авторов [35].
Таким образом, данные, ранее получаемые путем механических измерений, в рассматриваемой системе вычисляются исключительно путем цифровой обработкиизображений, поступающих с видеокамеры. От эффективности алгоритмов, применяемых на данном этапе, в значительной степени зависит точность и эффективность всего устройства сканирования. Трехмерные координаты поверхности сканируемого объекта так же получаются путем анализа цифровых изображений с видеокамеры для нахождения положения лазерного луча. Точность применяемых на данном этапе алгоритмов напрямую влияет на качество результирующей модели.
В настоящий момент на рынке отсутствуют готовые системы оптической лазерной триангуляции, работающие по вышеописанной схеме с произвольным положением лазера и видеокамеры, способные работать в условиях присутствия естественного фона позади сканируемого объекта и при наличии шумов во входном видеоряде. Вследствие этого, цифровая обработка сигналов, получаемых в системе оптической лазерной триангуляции с произвольным положением лазера и камеры, как на этапе калибровки, так и на этапе сканирования, является сложной и актуальной радиотехнической задачей.
Поэтому целыо работы является исследование существующих и разработка новых алгоритмов цифровой обработки сигналов с целью повышения точности и эффективности систем оптической лазерной триангуляции. Для достижения указанной цели решаются следующие задачи:
— разработка общей концепции построения устройства;
— разработка и анализ эффективного алгоритма калибровки (определения местоположения и параметров) видеокамеры для задачи лазерной триангуляции;
— анализ и выбор наиболее эффективных методов определения положения гауссова (лазерного) видеоимпульса на фоне шумов применительно к широкому диапазону условий сканирования;
— разработка методики предварительной цифровой обработки изображений для предобработки анализируемых в задаче триангуляции видеопоследовательностей;
— разработка методов постобработки триангуляционных данных с целью повышения точности результатов;
— разработка методики автоматического определения положения источника лазерного излучения, используя цифровые изображения с регистрирующей видеокамеры;
— анализ вычислительной эффективности и результативности различных методов предобработки и постобработки триангуляционных данных с целью построения системы, работающей в реальном масштабе времени;
— реализация предлагаемых алгоритмов на практике и анализ их эффективности.
Методы исследования. При решении поставленных задач использовались современные методы цифровой обработки одномерных и двумерных сигналов, статистической теории радиотехнических систем, методы математического моделирования, вычислительной геометрии в пространстве, теории вероятностей и математической статистики. Для практического использования алгоритмов применялась их реализация на языке программирования Object Pascal на базе ЭВМ общего назначения.
Достоверность полученных результатов. Достоверность полученных в работе результатов прошла неоднократную проверку методами математического моделирования и путем сравнения результатов, получаемых предлагаемым триангуляционным и классическими методами геометрических измерений. Они показали высокую степень соответствия параметров цифровых моделей и реальных объектов.
Научная новизна. В рамках диссертационной работы получены следующие новые научные результаты:
— разработана схема построения устройства, позволяющая автоматизировать определение положения лазера и видеокамеры и осуществить получение трехмерных моделей объектов с необходимой точностью без использования специализированных механических средств позиционирования лазера и регистрирующей видеокамеры;
— разработан алгоритм калибровки видеокамеры в реальном времени, работающий в широком диапазоне ракурсов и конфигураций калибровочного шаблона;
— разработан специальный тип калибровочных шаблонов и калибровочных меток для алгоритма калибровки видеокамеры, позволяющий производить их надежное обнаружение и дифференциацию;
— разработан алгоритм автоматического выбора порога на этапе пороговой обработки разностных изображений, использующий информацию о производной гистограммы изображения;
— разработан метод, позволяющий применить алгоритм пространственно-временной обработки сигналов в системе с автоматическим определением положения лазера с использованием только изображений, получаемых регистрирующей видеокамерой.
Практическая значимость. Применение методов и алгоритмов, разработанных в рамках данной работы, позволяет реализовать на практике построение эффективной системы лазерной триангуляции с использованием минимума технических средств и без использования специальных навыков у оператора, осуществляющего сканирование. На основе результатов исследования создан программный продукт, осуществляющий процедуру сканирования объектов в реальном масштабе времени на базе ЭВМ общего назначения без применения специализированных аппаратных средств обработки триангуляционных сигналов или средств позиционирования лазера и видеокамеры. Данный программный продукт прошел процедуру государственной регистрации программного обеспечения под наименованием «SoltScan».
Основные положения, выносимые на защиту:
— алгоритм калибровки цифровой видеокамеры по калибровочным шаблонам с автоматическим определением их конфигурации;
— алгоритм обнаружения калибровочных меток при различных ракурсах регистрирующей видеокамеры, наличии помех, при различных условиях освещения и качества оптической системы видеокамеры;
— алгоритм автоматического выбора порога на этапе пороговой обработки разностных изображений, использующий информацию о производной гистограммы изображения;
— методика адаптации алгоритма пространственно-временной цифровой обработки сигналов применительно к системе триангуляции, не требующей специальных методов позиционирования лазера и осуществляющей определение положения лазерного луча с использованием только изображений, получаемых регистрирующей видеокамерой;
— конфигурация алгоритмов предобработки и постобработки регистрируемых цифровых изображений и триангуляционных данных, позволяющих реализовать систему триангуляционного сканирования на базе ЭВМ общего назначения в реальном масштабе времени.
Апробация работы. Результаты работы обсуждались на следующих научно-технических семинарах и конференциях:
1. Девятой, десятой и одиннадцатой международных научных конференциях и выставках «Цифровая обработка сигналов и ее применение» (г. Москва, 2007;2009 гг.). Все три доклада награждены дипломами.
2. Третьей и четвертой международной научно-технической конференции «Современные телевизионные технологии. Состояние и направления развития» (г. Москва, МНИТИ, 2006 г., 2008 г.).
3. 15-й международной научно-технической конференции «Проблемы передачи и обработки информации в сетях и системах телекоммуникаций» (г. Рязань, 2008 г.).
4. Всероссийском научно-техническом семинаре «Системы синхронизации, формирования и обработки сигналов для связи и вещания» (г. Ярославль, 2008 г.).
5. 15-й международной научно-практической конференции «Информационные средства и технологии» (г. Москва, МЭИ, 2007 г.).
Публикации. По теме диссертации опубликовано 11 научных работ, из них статья в центральном журнале, рекомендованном ВАК, статья в рецензируемом журнале, статья в сборнике научных трудов, переводная статья в зарубежной печати, 7 докладов на научных конференциях российского и международного уровней. Кроме того, имеется свидетельство о государственной регистрации программного обеспечения, разработанного в рамках выполнения работы.
Структура и объем работы. Диссертация состоит из введения, четырех разделов, заключения, списка использованных источников, содержащего 102 наименования. Она изложена на 157 страницах машинописного текста, содержит 75 рисунков и 5 таблиц.
ЗАКЛЮЧЕНИЕ
.
Результатом исследований, проведенных в рамках диссертационной работы, является разработка ряда новых и анализ существующих алгоритмов цифровой обработки сигналов в задаче оптической лазерной триангуляции. Применение разработанных алгоритмов цифровой обработки изображений для калибровки видеокамеры по специальным калибровочным шаблонам, фильтрации фона во входной видеопоследовательности, пространственно-временной обработки, классических алгоритмов цифровой фильтрации входной видеопоследовательности, методов определения положения гауссова видеоимпульса, цифровой фильтрации выходных моделей, а также специальных алгоритмов вычисления трехмерных координат и построения трехмерной сетки позволили создать на практике эффективную систему сканирования объектов для получения их трехмерных цифровых моделей с минимальным набором компонентов.
Разработанная с применением указанных алгоритмов система обладает высокой точностью и не требует специализированных механических устройств (например, координатно-измерительных машин) позиционирования лазера и видеокамеры. Система полноценно работает в случае, когда источник лазерного излучения на весу держит в руках оператор, осуществляющий сканирование. Алгоритм автоматически в реальном времени вычисляет положение руки оператора с источником лазерного излучения и определяет трехмерные координаты точек поверхности сканируемого объекта. В качестве калибровочного шаблона с минимальной потерей точности может быть использован распечатанный на обычном принтере лист бумаги, согнутый под прямым углом. Алгоритм остается работоспособным и при значительном уровне шумов во входной видеопоследовательности, например при использовании в регистрирующей видеокамере низкокачественной КМОП-матрицы. Разработанный алгоритм калибровки видеокамеры как метод определения ее положения и внутренних параметров применим не только в задаче оптической лазерной триангуляции, но и в других задачах технического зрения.
Таким образом, в качестве основных можно выделить следующие результаты:
— разработан алгоритм цифровой обработки изображений для эффективного обнаружения калибровочных меток в широком диапазоне ракурсов видеокамеры, условиях наличия шума и низкого качества изображения;
— разработана структура специальных калибровочных шаблонов, позволяющих производить калибровку видеокамеры при наличии шума, геометрических искажений и в случае низкого качества изображений, получаемых регистрирующей видеокамерой;
— разработан специализированный тип калибровочных меток, позволяющий выполнить их надежное обнаружение на цифровом изображении и произвести дискриминацию одних меток от других;
— разработан алгоритм автоматического выбора порога на этапе пороговой обработки разностных изображений, использующий информацию о производной гистограммы изображения;
— разработан алгоритм, позволяющий применить метод пространственно-временной обработки сигналов в задаче лазерной триангуляции с произвольным положением лазера и видеокамеры;
— проанализированы существующие оптимальные и неоптимальные методы нахождения положения лазерного видеоимпульса на цифровом изображении, произведено сравнение их точности и скорости работы в различных условиях с целью определения наиболее эффективного метода, применимого в разработанной системе;
— проанализирована эффективность метода пространственно-временной обработки в задаче лазерной триангуляции, получены численные оценки повышения точности сканирования при использовании данного метода в различных условиях;
— создан программный продукт, использующий все разработанные алгоритмы и позволяющий производить процедуру сканирования трехмерных объектов в реальном масштабе времени без необходимости применения специализированных аппаратных средств позиционирования лазера, видеокамеры или систем аппаратной обработки сигналов.
В результате достигнута цель работы — исследованы существующие и разработаны новые алгоритмы цифровой обработки сигналов и изображений, позволяющие повысить точность и эффективность систем оптической лазерной триангуляции. Разрешающая способность системы, созданной на базе полученных в работе результатов, зависит, прежде всего, от выбора регистрирующей видеокамеры и угла триангуляции. При использовании цифровой видеокамеры с разрешением 1280×1024 точек разрешающая способность системы составляет около 0,03 мм при СКО от идеальной пластинки 0,04 мм.
Отказ от координатно-измерительной машины и переход к определению положения камеры методом обработки цифровых изображений позволяет значительно удешевить систему с сохранением требуемой точности и достоверности результатов. В настоящий момент времени на рынке отсутствуют готовые системы оптической лазерной триангуляции с произвольным положением лазера и видеокамеры с характеристиками, близкими или превосходящими возможности разработанной в рамках диссертационной работы системы.
Список литературы
- D лазерные информационные технологии / П. Е. Твердохлеб, В. П. Коронкевич, Э. Г. Косцов и др.- Отв. ред. П.Е. Твердохлеб- Рос. акад. наук, Сиб. отд-ние, Ин-т автоматики и электрометрии. — Новосибирск: 2003.
- Венедиктов А.З., Дёмкин В. Н., Доков Д. С. Лазерные методы и средства контроля геометрии деталей // В мире неразрушающего контроля. 2004. № 1 (23). С. 67−68.
- Плотников С.В., Подчернин В. М., Быковская И. В. Триангуляционные измерители и их промышленное применение // Техника машиностроения. 2003. № 4. С. 107−108.
- Латышев Ю.В., Кудоба Т. С., Плотников С. В., Подчернин В. М. Оценка конкурентоспособности лазерных триангуляционных измерителей расстояний // Датчики и системы. 2001. № 6. С. 46−49.
- Acosta D., Garcia О., Aponte J. Laser triangulation for shape acquisition in a 3D scanner plus scan // Proc. of the Electronics, Robotics and Automotive Mechanics Conference (CERMA'06). 2006. P. 14−19.
- Clarke T.A., Grattan K.T.V., Lindsey N.E. Laser-based triangulation techniques in optical inspection of industrial structure // Proc. SPIE. 1990. V. 1332, P. 474−486.
- Leu M.C., Ji Z. Non-linear displacement sensor based on optical triangulation //U.S. Patent 5 113 080. 1992.
- Blais F., Lecavalier M., Bisson J. Real-time processing and validation of optical ranging in a cluttered environment // ICSPAT. 1996. P. 1066−1070.
- Clarke T.A. The development of an optical triangulation pipe profiling instrument// Optical 3-D Measurement Techniques. 1995. V. 3, P. 331−340.
- Kilgus D.B.T., Svetkoff D.J. Imaging geometry and error sensitivity in triangulation-based optical receivers // Proc. SPIE. 1996. V. 2599, P. 106−129.
- Kim К., Kim J., Oh S., Kim S.H., Kwak Y.K. Accuracy enhancement of point triangulation probes for linear displacement measurement // Proc. SPIE. 2000. V. 3945, P. 88−95.
- Kilgus D.B., Svetkoff D.J. Imaging geometry and error sensitivity in triangulation-based optical receivers // Proc. SPIE. 1996. V. 2599, P. 106−119.
- Lavelle J.P., Schuet S.R., Schuet D.J. High-speed 3D scanner with real-time 3D processing // Proc. SPIE. 2004. V. 5393, P. 19−28.
- Hauster G., Herrman J. Physical limits of 3-D sensing // Proc. SPIE. 1992. V. 1822, P. 150.
- Bickel G., Haulser G., Maul M. Triangulation with expanded range of depth // Optical Engineering. 1985. V. 24, No. 6. P. 975−977.
- Buzinski M., Levine A., Stevenson W.H. Performance characteristics of range sensors utilizing optical triangulation // Proc. NAECON. 1992. P. 1230−1236.
- Dorsch R.G., Hausler G., Herrmann J.M. Laser triangulation: fundamental uncertainty in distance measurement // Applied Optics. 1994. V. 33, No. 7. P. 1302−1314.
- Вертопрахов В.В. Влияние формы объекта и ориентации его поверхности на точность лазерных триангуляционных измерений // Автометрия. 1995. № 6. С. 64−68.
- Давыденко Е.В., Приоров A.JI. Обработка сигналов в системе лазерной триангуляции с минимальным набором компонентов // Измерительная техника. 2008. № 10. С. 35−39.
- Давыденко Е.В. Система оптической лазерной триангуляции повышенной надежности // Актуальные проблемы физики: Сб. науч. тр. молодых ученых, аспирантов и студентов. Вып. 6. / Яросл. гос. ун-т. Ярославль. 2007. С. 78−85.
- Давыденко Е.В. Система оптической лазерной триангуляции с автоматическим определением положения лазера и камеры // Сб. тр. науч.-тех. сем. «Системы синхронизации, формирования и обработки сигналов для связи и вещания». Ярославль. 2008. С. 12−14.
- Шапиро Л., Стокман Дж. Компьютерное зрение / Пер. с англ. М.: БИНОМ, Лаборатория знаний, 2006.
- Mundy J.L., Porter G.B. Three-dimensional machine vision / Kluver Academic Publishers. 1987.
- Давыденко Е.В., Приоров А. Л. Система оптической лазерной триангуляции повышенной надежности // Матер. 15-й междунар. конф. «Информационные средства и технологии». Москва. МЭИ, 2007. Т. 1, С. 93−96.
- Давыденко Е.В., Приоров А. Л. Система оптической лазерной триангуляции с автоматическим определением положения лазера и камеры // Докл. 10-й междунар. конф. «Цифровая обработка сигналов и ее применение» (DSPA-2008). Москва. 2008. Т. 2, С. 547−550.
- Тихонов В.И. Статистическая радиотехника. — М.: Советское радио, 1966.
- Репин В.Г., Тартаковский Г. П. Статистический синтез при априорной неопределенности и адаптация информационных систем. — М.: Советское радио, 1977.
- Вайнштейн Л.А., ЗубаковВ.Д. Выделение сигналов на фоне случайных помех. -М.: Советское радио, 1960.
- Уайлд Д.Дж. Методы поиска экстремума / Пер. с англ. А. Н. Кабалевского, Е. П. Маслова, В.Д. Спиридонова- Под ред. А. А. Фельдбаума. М.: Наука, 1967.
- Краснов В.Н., Сахно С. П., Тымчик Г. С. Алгоритмы поиска экстремальных значений видеосигнала ПЗС-приемников // Приборостроение. 1986. № 4. С. 77−81.
- Чураков Е.П. Оптимальные и адаптивные системы: Учеб. пособие для вузов. -М.: Энергоатомиздат, 1987.
- Трифонов А.П., Захаров А. В., ПроняевЕ.В. Обработка импульсов с гауссовской случайной субструктурой при наличии шума // Докл. 9-й междунар. конф. «Цифровая обработка сигналов и ее применение» (DSPA-2007). Москва. 2000. Т. 1, С. 80−84.
- Пальчик О.В., Горкин В. Н. Обобщение интегральных методов оценки положения импульса методом циклической свёртки // Информационные технологии моделирования и управления. 2005. № 3(21). С. 375−383.
- Soucy М., Laurendeau D., Poussart D., Auclair F. Behavior of the center of gravity of a reflected Gaussian laser spot near a surface reflectance discontinuity / Industrial Metrology. 1990. V. 1, No. 3, P. 261−274.
- Цифровая обработка телевизионных и компьютерных изображений. / А. В. Дворкович, В. П. Дворкович, Ю. Б. Зубарев и др. М.: Радио и связь, 1997.
- Прэтт У. Цифровая обработка изображений. В 2-х книгах. М.: Мир, 1982.
- Гонсалес Р. Цифровая обработка изображений. М.: Техносфера, 2005.
- Приоров А.Л., Ганин А. Н., Хрящев В. В. Цифровая обработка изображений. — Ярославль: ЯрГУ, 2001.
- Фурман Я.А. и др. Введение в контурный анализ и его приложения к обработке изображений и сигналов. М.: ФИЗМАТ ЛИЗ, 2002.
- Canny J. A computational approach to edge detection // IEEE Trans. On Pattern Analysis and Machine Intelligence. 1986. V. 8, No. 6. P. 679−698.
- A discrete expression of Canny’s criteria for step edge detector performances valuation // IEEE Trans, on Pattern Analysis and Machine Intelligence. 1997. V. 19, No. 11. P. 1199−1211.
- Accurate and robust line segment extraction by analyzing distribution around peaks in Hough space // Computer Vision and Image Understanding. 2003. V. 92, No. l.P. 1−25.
- Nocedal J., Wright S.J. Numerical Optimization N.Y.: Springer, 1999.
- Ranganathan A. The Levenberg-Marquardt algorithm. http://www.cc.gatech.edu/people/home/ananth/docs/lmtut.pdf
- Levenberg K. A method for the solution of certain problems in least squares // Quart. Appl. Math. 1944. V. 2, P. 164−168.
- Marquardt D. An algorithm for least-squares estimation of nonlinear parameters // J. Soc. Indust. Appl. Math. 1963. V. 11, P. 431−441.
- Vetterling W.T. Numerical Recipes in C — N.Y.: Cambridge Univ. Press, 1992.
- Заварыкин B.M., Житомирский В. Г., Лапчик М. П. Численные методы. М.: Просвещение, 1990.
- Indyk P., Motwani R., Venkatasubramanian S. Geometric matching under noise: combinatorial bounds and algorithms // Proc. 10th. Annual ACM-SIAM Symp. on Discrete Algorithms, 1999. P. 457−465.
- Comaniciu D., Meer P. Robust analysis of feature spaces: color image segmentation // Proc. IEEE Conf. on Сотр. Vis. and Pattern Recognition. 1997. P. 750−755.
- Demirdjian D., Zisserman A., Horaud R. Stereo autocalibration from one plane // Proc. ECCV. 2000. V. 2, P. 625−639.
- Zhang Z. A flexible new technique for camera calibration // IEEE Trans, on Pattern Analysis and Machine Intelligence. 2000. V. 22, No. 11. P. 13 301 334.
- Azarbayejani A., Pentland A. Recursive estimation of motion, structure, and focal length // IEEE Trans, on Pattern Analysis and Machine Intelligence. 1995. V. 17, No. 6. P. 562−575.
- Duda R., Hart P., Stark D. Pattern Classification. -N.Y.: John Wiley & Sons, 2000.
- Frei W., Chen C-C. Fast boundary detection: a generalization and new algorithm // IEEE Trans, on Pattern Analysis and Machine Intelligence. 1977. V. 26, No. 10, P.988−998.
- Surmann H., Lingemann K., Nuchter A., Hertzberg J. Fast acquiring and analysis of three dimensional laser range data // Proc. of the of the 6th Int. Fall Workshop Vision, Modeling, and Visualization (VMV '01), Stuttgart. Germany. 2001. P. 59−66.
- Szirmay-Kalos L. Theory of three-dimensional computer graphics. — Budapest: Publishing House of the Hungarian Academy of Sciences, 1995.
- Azuma R.T. A survey on augmented reality / Teleoperators and Virtual Environments. 1997. V. 6, No. 4. P. 355−385.
- Curless В., Levoy M. Better optical triangulation through spacetime analysis // Proc. of IEEE International Conference on Computer Vision. 1995. P. 987 994.
- Davis J., Marschner S., Garr M., Levoy M. Filling holes in complex surfaces using volumetric diffusion // Proc. First International Symposium on 3D Data Processing, Visualization, and Transmission. 2002. P. 428−861.
- Amenta N., Bern M., Kamvysselis M. A new Voronoi-based surface reconstruction algorithm // Proc. SIGGRAPH. 1998. P. 415−421.
- Robertson C., Fisher R.B., Werghi N., Ashbrook A. Fitting of constrained feature models to poor 3d data // Proc. Adaptive Computing in Design and Manufacture. 2000. P. 149−160.
- Dey Т.К., Giesen J., Hudson J. Delaunay based shape reconstruction from large data // Proc. Symposium on Parallel and Large Data Visualization and Graphics Surfaces and Parallel Rendering. 2001. P. 19−21.
- Nuchter A., Surmann H., Hertzberg J. Automatic model refinement for 3D reconstruction with mobile robots // Proc. of the 4th IEEE Int. Conf. on Recent Advances in 3D Digital Imaging and Modeling (3DIM '03). Banff, Canada. P. 394−401.
- Walder J. An experimental system for reconstructing a scene from the image sequences produced by a moving camera // Proc. CESCG. Budmerice. Slovakia. 1999. P. 139−148.
- Bubna K., Stewart C.V. Model selection techniques and merging rules for range data segmentation algorithms // Computer Vision and Image Understanding. 2000. V. 80, P. 215−245.
- Levenberg K. A method for the solution of certain problems in least squares // Quart. Appl. Math. 1944. V. 2, P. 164−168.
- Marquardt D. An algorithm for least-squares estimation of nonlinear parameters // Appl. Math. 1963. V. 11, P. 431−441.
- Nocedal J., Wright S.J. Numerical Optimization. N.Y.: Springer, 1999.
- Kilgus D.B.T., Svetkoff D.J. Distortion characteristics and mapping in triangulation imaging systems // Proc. SPIE. 1994. V. 2348, P. 106−129.
- Baribeau R., Rioux M. Influence of speckle on laser range finders // App. Opt. 1991. V. 30, No. 20. P. 2873−2878.
- Goodman J.W. Laser speckle and related phenomena. N.Y.: Springer-Verlag, 1984.
- Baribeau R., Rioux M. Centroid fluctuations of speckled targets // App. Opt. 1991. V. 30, No. 26. P. 3752−3755.
- Скворцов A.B. Обзор алгоритмов построения триангуляции // Вычислительные методы и программирование. 2002. № 1. С. 14−39.
- Майкл JI. Вычислительная геометрия и компьютерная графика на С++. -М.: БИНОМ, 1997.
- Jonathan R. Delaunay refinement algorithms for triangular mesh generation, computational geometry // Theory and Applications. 2002. V. 22, P. 21−74.
- Шишкин А.В., БоресковА.В. Компьютерная графика. Полигональные модели. -М.: Диалог-МИФИ, 2000.
- Райе Д.Р. Матричные вычисления и математическое обеспечение: Пер. с англ. М.: Мир, 1984.
- Зайдель А.П. Ошибки измерений физических величин. -М.: Наука, 1974.
- Рабинович С.Г. Погрешности измерений. Л.: Энергия, 1978.
- Arun К., Huang Т., Blostein S. Least-Squares Fitting of Two 3-D Point Sets // IEEE Trans, on Pattern Analysis and Machine Intelligence. 1987. V. 9, No. 5. P. 698−700.
- Bergevin R., Soucy M., Gagnon H., Laurendeau D. Towards a general multi-view registration technique // IEEE Trans, on Pattern Analysis and Machine Intelligence. 1996. V. 18, No. 5. P. 540−547.
- Blais G., Levine M. Registering multiview range data to create 3D computer objects // IEEE Trans, on Pattern Analysis and Machine Intelligence. 1995. V. 17, No. 8. P. 820−824.
- Chen Y., Medioni G. Object modeling by registration of multiple range images // Proc. IEEE Conf. on Robotics and Automation. 1991. P. 51−65.
- Chen C., Hung Y., Cheng J. A fast automatic method for registration of partially-overlapping range images // Proc. ICCV. 1998. P. 242−248.
- Dorai C., Weng J., Jain A. Optimal registration of object views using range data // IEEE Trans, on Pattern Analysis and Machine Intelligence. 1997. V. 19, No. 10. P. 1131−1138.
- Horn B. Closed-form solution of absolute orientation using unit quaternions // Journal of the Optical Society of America. 1987. V. 4, No. 4. P. 629−642.
- Johnson A., Kang S. Registration and integration of textured 3-D data // Proc. International Conference on Recent Advances in 3-D Digital Imaging and Modeling. 1997. P. 234.
- Masuda Т., Sakaue К., Yokoya N. Registration and integration of multiple range images for 3-D model construction // Proc. International Conference on Pattern Recognition. 1996. P. 879.
- Irani M., Peleg S. Improving resolution by image registration // Graphical Models and Image Processing. 1991. V. 53, No. 3. P. 231−239.
- Bajaj C.L., Bernardini F., Xu G. Automatic reconstruction of surfaces and scalar fields from 3D scans // Proc. 22nd annual conference on computer graphics and interactive techniques. 1995. P. 109−118.
- Hoppe H., De Rose Т., Duchamp Т., McDonald J., Stuetzle W. Surface reconstruction from unorganized points // Proc. 19th annual conference on computer graphics and interactive techniques. 1992. P. 71−78.
- Davydenko E.V., Priorov A.L. Signal processing in an optical laser triangulation system with the minimum set of components // Measurement Techniques. 2008. V. 51, No. 10. P. 1097−1103.
- Garland M., Heckbert P. S. Surface simplification using quadric error metrics // Proc. 24th annual conference on computer graphics and interactive techniques. 1997. P. 209−216.
- Ко M., Choy Y. 3D mesh simplification for effective network transmission // Proc. 5th IEEE Int. Conf. on High-Speed Networks and Multimedia Communication. 2002, P. 284−288.
- Velho L. Mesh simplification using four-face clusters // Proc. International Conference on Shape Modeling & Applications. 2001. P. 200.
- Cignonni P., Montani C., Varshney A. A comparison of mesh simplification algorithms // Сотр. & Graph. 1998. V. 22, No. 1. P. 37−54.
- Franc M., Skala V. Triangular mesh decimation in parallel environment // EUROGRAPHICS Workshop on Computer Graphics and Visualization. Girona. Spain. 2000. P. 39−52.
- Hoppe H., De Rose Т., Duchamp Т., McDonald J., Stuetzle W. Mesh optimization // Proc. ACM Computer Graphics conf. Annual Conference Series (SIGGRAPH'93). 1993. P. 19−26.
- Давыденко Е.В., Приоров А. Л. Свидетельство о государственной регистрации программы для ЭВМ № 2 009 611 032. SoltScan программа сканирования объектов методом лазерной триангуляции. 2009.