Оптимизация организации систем управления электронными узлами коммутации телефонных каналов
Автор использовал в качестве критерия оптимизации организации систем управления приведенные затраты и предложил согласованную с ним систему частных критериев. Приведенные затраты выражаются как функция от параметров потоков обмена, требуемого быстродействия процессоров, объемов памяти, вводимой аппаратной избыточности, параметра потока отказов и требуемой скорости восстановления. Благодаря… Читать ещё >
Содержание
- 1. Тенденции развития и методика исследования систем управления узлами коммутации телефонных каналов. II
- 1. 1. Развитие систем управления узлами коммутации телефонных каналов .II
- 1. 2. Исходная структура системы управления
- 1. 3. Критерий оптимизации организации системы управления узлом коммутации
- 1. 4. Выводы
- 2. Исследование минимально допустимых ресурсов системы управления
- 2. 1. Модель процесса обслуживания телефонных вызовов
- 2. 2. Оценка потоков обмена информацией
- 2. 3. Анализ требуемой производительности процессоров
- 2. 4. Уточнение требуемой производительности периферийной управляющей машины
- 2. 5. Исследование требуемого объема памяти
- 2. 6. Зависимость безызбыточных капитальных затрат от распределения функций между элементами системы управления
- 2. 7. Выводы
- 3. Исследование систем управления с учетом их эксплуатационных свойств
- 3. 1. Поддержание качества обслуживания телефонных вызовов
- 3. 2. Обслуживание изолированной управляющей машины
- 3. 3. Обслуживание модуля системы управления
- 3. 4. Анализ многомодульной структуры СУ
- 3. 5. Выводы
- 4. Решение практических задач построения системы управления электронным узлом коммутации
- 4. 1. Минимизация объема памяти микропрограмм
- 4. 2. Снижение машинных затрат на обмен при предварительной обработке сигнальной информации
- 4. 3. Построение распределенной системы управления АМТС-Э с использованием микро-ЭВМ «Электроника--60»
- 4. 4. Сравнение двух систем управления
- 4. 5. Выводы
Оптимизация организации систем управления электронными узлами коммутации телефонных каналов (реферат, курсовая, диплом, контрольная)
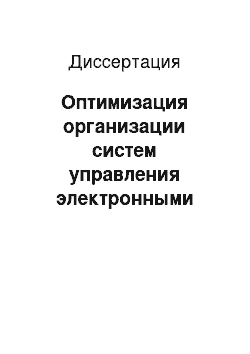
В настоящее время средства доставки информации приобретают вое большее народно-хозяйственное значение. «Сегодня связь должна не просто обслуживать производство» а глубоко проникать в него, все в большей мере становись одним из необходимых звеньев единого технологического процесса, элементом производительных сил" /60/. Одной из важных задач, поставленных XX7I съездом КПСС, является создание в нашей стране Единой Автоматизированной Сети Связи (ЕАСС) / -f ^ с И Ъ /. Наиболее значительная часть ее, по которой производится основной обмен и^ормацией, Общегосударственная сеть телефонной связи. В соответствии с принципами ЕЛСС, обслуживание абонентов с участием персонала должно производиться лишь в редких специальных случаях. Основная часть телефонных вызовов должна обрабатываться на автоматических телефонных станциях и узлах коммутации. Развитие сети требует совершенствования средств связи, сокращения материальных и трудовых затрат на их производство и эксплуатацию. Требования эти распространяются и на узлы коммутации, в частности, на системы зшравления ими. Серьезное влияние на экономические показатели средств связи оказывают достижения полупроводниковой технологии. Современный этап развития полупроводниковой технологии характеризуется разработкой микросхем высокой степени интеграции, важнейшие из которых — микропроцессорные наборы и большие интегральные схемы запоминающих устройств. Главные последствия этих достижений для узлов коммутации: широкое развитие цифровых способов передачи информации, построение электронных коммутационных систем, внедрение микропроцессорной 5 техники в управление. Вое это является предпосылкой для создания экономически приемлемых полностью электронных узлов коммутации. Во многих странах ведутся разработки в этой области, однако, как показывает обзор выпускаемых в настоящее время электронных станций, строятся они по самым различным принципам. Сказанное касается и систем управления узлами комА^тации, единственная общая черта которых — многомодульная структура с использованием микропроцессоров. В настоящее время не найдена оптимальная организация систем управления электронными узлами коммутации телефонных каналов. Шенно этой актуальной теме посвящена настоящая работа. Проблемы построения систем распределения информации и методы их исследования рассматриваются в работах советских авторов. В последнее время появились работы, посвященные отдельным вопросам построения управляющих комплексов на узлах коммутации. Среди них — статьи Л. Я. Мисуловина / ^ /, Ю. А. Бакланова с соавторами /с,?/, В. И. Шляпоберского /YY /, А. Г. Кухарчука /5'7,5*8/.Во всех указанных работах рассматриваются системы управления квазиэлектронными станциями, построенные на базе микросхем малой и средней степени интеграции. Применению более современной микропроцессорной техники посвящено исследование Т. Н. Дамговой / 1S /.Цель настоящего исследования состоит в выборе оптимальной организации системы управления электронным узлом коммутации телефонных каналов. Основные задачи, которые необходимо решить для осуществления поставленной цели: — изучить современное состояние разработки систем управления электронными узлами коммутации телефонных каналов- - выбрать критерий оптимизации и согласованные с ним критерии оценки организации систем управления, позволящие найти наиболее эффективные варианты- - провести анализ алгоритма обслуживания телефонных вызовов и построить его модель, удобнзгю для исследования- - провести исследование зависимости ресурсов системы управления от распределения функций между элементавяи многомодульной системы управления- - изучить влияние структурных мер по поддержанию работоспособности СУ на ее экономические показатели. Методика исследования выбрана о учетом того, что организация системы управления определяется множеством факторов, требующих от разработчика постановки различных, порой противоречивых подцелей. В связи о этим выбран критерий оптимизации и разработана система согласованных с ним частных критериев оценки, позволяющая разложить общую задачу в ряд частных задач. Исследова- 8 ние ведется по каждому из этих критериев. В заключение результаты частных решений обобщаются и делаются выводы относительно оптимальной организации системы управления. В качестве критерия оптимизации приняты приведенные затраты. При исследовании использован аппарат теории телетра$ика, теории надежности, элементы принятия решений. На защиту выносятся следущие основные положения: — в качестве критерия оптимизации организации СУ целесообразно применять приведенные затраты, которые разбиваются на ряд частных, более простых показателей: затраты на обмен, на обработку информации, на хранение информации, на введение избыточности с целью пошшения надежности системы, на устранение отказов, на ремонтные работы- - при наличии достаточно дешевых микро-ЭШ оптимальным по капитальным затратам является такое распределение функций в СУ, когда все этапы любой фазы обслуживания телефонных вызовов выполняются одной ЭУМ- - выбор оптимального способа обеспечения надежности управляющего модуля зависит от соотношения стоимости единицы аппаратуры и удельных эксплуатационных затрат, а также от длительности часов наибольшей нагрузки- - 10- в соответствии с принятым критерием оптимизации при использовании универсальных микро-ЭВМ наилучшим является модульное построение электронного узла коммутации с автономным управлением в каждой модуле, при этом каждый вызов обслуживается не более чем двумя управляющими машинами, Все результаты, изложенные в диссертации, получены лично автором в процессе выполнения в ЦНИИС плановых научно-исследовательских и опытно-конструкторских работ по темам: «Исследование принципов и разработка основных положений построения рада программно-совместимых специализированных управляющих вычислительных машин для управления системами коммутации» — «Изыскание инженерных решений построения оборудования цифровых электронных систем коммутации» — «Создание электронного телефонного коммутационного оборудования для междугородной связи с применением аналого-цифровых преобразователей с дельта-модуляцией и управлением от специализированных ЭВМ с изготовлением и испытанием действующего макета» — «Разработка и освоение в производстве электронной автоматической междугородной телефонной станции малой и средней емкости», Результаты работы были реализованы и прошли испытания в условиях реальных сетей в рабочем макете СУВК «Нева-2 на ЙВТУ, в рабочем макете УМЭ, а также использованы при разработке рабочего макета Ж Г С Э и выработке рекомендаций по построению специализированных машин для управления комвлутационными сетями, что подтверждено соответствующими актами о внедрении, данными в Приложении. Основные результаты диссертации были опубликованы в печати и доложены на всесоюзных симпозиумах и конференциях /19−31/, — II I. ТЕЩЩНЦИИ РАЗВИТИЯ И МЕТОДИКА ИССЛЕДОВАНИЯ СИСТЕМ УПРАВЛЕНИЯ УЗЛАМИ КОММУТАЦИИ ТЕЛЕФОННЫХ КАНАЛОВ I. I, Развитие систем управления узлами коммутации телефонных каналов Данный раздел содержит краткий обзор управления автоматическими узлами коммутаЕщи телефонных каналов (АУК) в историческом аспектеЦель обзора заключается в выявлении основных тенденций развития СУ вплоть до настоящего времени. Длн целей исследования удобно функции, выполняемые на АУК, подразделить на исполнительные и управляющие.' К исполнительным функциям будем относить преобразования физического способа отображения информации (приём,^ передачу и т. п.) и коммутацию. К управляющим функциям отнесём сбор, хранение и логическое преобразование информации взаимодействия АУК с сетью и персоналом, а также выдачу приказов на реализацию исполнительных функций. В соответствии с выполняемыми функциями оборудование АУК также можно подразделить на исполнительное и управляющее. В ходе развития техники автоматической коммутации изменялся как состав оборудования, так и его структура. Главной целью совершенствования управляющего оборудования было повышение степени его использования / б ^ /. На ранних стадиях развития АУК применялись индивидуальные управляющие приборы. При этом каждым исполнительным прибором управлял единственный, закреплённый за ним управляющий прибор, либо комплект управляющего оборудования. Управляющий прибор в каждый момент времени мог быть занят обслу- 12 живанием не более одного вызова и работал лишь во время уотановления соединения. Во время разговора по установленному соединению и после окончания разговора, до поступления следующего вызова, прибор простаивал. Степень использования управляющего оборудования при индивидуальном способе управленш, характерном для декадно-шаговых станций, была ничтожной. Позднее появились групповые управляющие приборы. Они могут быть использованы в каждый момент времени для обслуживания не более одного вызова, однако принадлежат уже не одному, а грутше исполнительных приборов. Эти управляющие приборы заняты во время установления соединения либо какой-то его фазы. После выполнения операции прибор освобождается и готов к обслуживанию нового вызова, поступившего по линии соответствующей группы. К устройствам такого типа можно отнести регистры, маркеры и подобные им приборы, устанавливаемые на станциях координатного типа. Их использование значительно выше, чем у индивидуальных приборов. Дальнейшее развитие управления на АУК привело к появлению принципиально новых приборов совместного пользования. Эти приборы, благодаря своему быстродействию, могут одновременно участвовать в обслуживании множества вызовов.Подразумевается одновременность в том масштабе времени, в котором протекают процессы по установлению соединения). Появление таких приборов связано о внедрением на А7К программного управления. Вначале были попытки построить управление при помощи программных автоматов. Более рациональным, однако, оказалось использование для этих целей специализированных электронных управляющих машин кдШ), Достижения в области производства вычислительных и управляющих машин все более сужают область применения в управлении программных автоматов. Поэтому наибольший интерес для исследования представ- 13 ляют АУК с пр1именвнивм ЭУМ, При этом одновременное использование других аппаратных средств не исключается. Почти двадцатилетняя история исследований, разработок и эксплуатации АУК с программным управлением продемонстрировала его несомненные достоинства: экономичность, гибкость, возможность предоставления новых услуг, совершенствование эксплуатации и т. д.Развитие программного управления, следуя за основными достижениями в построении систем обработки информации, прошло ряд этапов. В основном эти этапы определялись технологическими причинами, главным образом элементной базой. Изменения применяемой элементной базы удобнее всего проследить на примере станций типа ESS (табл.1).Таблица I Развитие элементной базы Год Тип станции Применяемые элементы 1965 1969 1970 1976 Е^Ы Транзисторы, резисторы -» — Гибридные схемы -" - Интегральные схемы ESS1A Большие интегральные схемы Ш0/ преимущественно в полупроводником ОЗУ Основная цель разработок в этой области — уменьшение ручного труда в производстве и эксплуатации, повышение надежности аппаратуры и уменьшение ее габаритов. Достигается это за счет повышения интеграции полупроводниковых интегральных схем. — 14 Совершенствование элементной базы и использование других достижений технологии оказывается на стоимости управляющих машин. Изменение этого показателя удобно проследить по изменению нижней границы числа абонентов, обслуживаемых одной управлящей машиной на телефонной станции (рисД). Нижняя граница характерна потому, что именно она показывает, с какой емкости станции становится экономически оправданным программное управление. Пределом этой тенденции могло бы быть применение одной машины для обслуживания одного канала или даже абонента. Однако применение микропроцессоров в телефонных аппаратах в настоящее время признано пока нецелесообразным / ^? / .Приведенная на рис. зависимость показывает, что начальный период развития программного зшравления характеризуется весьма высокой стоимостью ЭУМ, при которой оно оправдано лишь на станциях большой емкости. Это определило и основное направление усилий разработчиков: предельная концентрация функций управ^ ления, при которой повышается эффективность использования ЭУМ. Нагрузка, поступащая на разные станции, изменяется в широких пределах. На ранней стадии разработок для каждого типа станций создавалась собственная машина, причем Э Ш различались между собой даже систекшвш команд и форматами слов (?S&I, 2, 3) .Рис.2 0(5'щая С)(ема э/1еутроиного узла номмута' ции теле (ронных нана/юё. — 16 принята для станции ESS-J и позднее в других разработках (ДЮ в Японии, ^ Р — I в Канаде и др.) /?4/02/.Стремление к повышению производительности СУ привело к распределению нагрузки: к машине станции был подключен сигнальный процессор, который осуществлял обмен с исполнительными устройствами, а также начальную, самзгю примитивную обработ1? у информации. Это позволило с малыми затратами удвоить производительность СУ. Подобная структура принята на отечественной ЛМТС КЭ Кварц. Следущий этап заключался в создании систем, в которых нагрузка распределяется между равноценными модулями управления. Такая структура, позволяющая наращивать оборудование СУ, была принята в системах Метаконта, EII, EI2, PRX205 и других. Последняя, например, благодаря модульному построению АУК, позволяет обслужить нагрузку от сотни до дееятков тысяч эрланг. Кроме локального распределения нагрузки, когда ЭУМ расположены близко одна от дрзггой, на более высоком уровне развития стали применяться СУ с разделением нагрузки между машинами, расположенными на значительном расстоянии. На удаленную ЭУМ в таких случаях возлагается контроль, диагностика, учет стоимости, перераспределение телефрнной нагрузки и т. д. Передача эксплуатационных функций удаленной машине позволяет сократить численность обслуживающего персонала. Этот способ принят во многих достаточно разветвленных системах, например Е Ю, £32,'n (e-4,EWS-l.Структурные меры по обеспечению надежности управления не отличаются большим разнообразием. В большинстве случаев применяется дублирование при синхронной работе основной и резервной машин. Сравнение результатов работы обеих машин позволяет обна- 17 ружить появление ошибки. Дальнейшие диагностические операции вЕШвляют место неисправности. Такой способ применяется как в системах с предельной централизацией управления, так и с модульным построением СУ, когда кажднй модуль состоит из двух синхронно работаюощх маш[ин.Другой способ резервирования применен в системе Метаконта. В СУ количество ЭУМ берется на одну больше, чем необходимо для обеспечения требуемой пропускной способности. При отказе одной из работающих машин вое оставшиеся берут на себя всю нагрузку. В этом случае явно проявилось стремление разработчиков сократить число дорогостоящих управляющих машин. Если вернуться к общей структуре систем управления, то мояшо сказать, что они развивались от предельно децентрализованных на ранних этапах создания ЛУК к предельно централизованным на первЕ2х станциях с программным управлением. В дальнейшем СУ вновь были децентрализованы. Эта последняя тенденция особенно ярко проявляется при построении электронных станций с применением микропроцессорной техники. Вначале разработчики располагали простыми маломощными микропроцессорами, на которые мояшо было возложить лишь примитивную начальную обработку сигналов и тем самым частично разгрузить центральную управляющую машину. В настоящее время полупроводниковая промышленность выпускает микропроцессорные наборы с различными системами команд, архитектурой, быстродействием, средствами обмена, объемом памяти и т. д. Возникают новые возможности построения систем управления. В связи с этим появилась необходимость пересмотра их структуры. Поиску наилучшей организации систем управления узлами коммутации телефонных каналов в современных условиях посвящены последущие разделы настоящей работы. — 18 1.2, Исходная структура оиетемн управления Упрощенная модель электронного узла коммутации телефонных каналов, полученная в результате проведенного обзора (П1), включает в себя исполнительное оборудование и систему управления (рис.2), Объект исследования в настоящей работе — системы управления, содерясащие в своем составе ЭУМ. Данный раздел посвящен установлению границ изучаемого объекта, а точнее — выбору класса структур СУ, среди которых будет впоследствии отыскиваться наилучшая, Требования, тпредъявляемые к построению СУ, зависят от целого ряда факторов и определяются возможностями используемых ЭУМ, оборудованием АУК и свойствами решаемых задач. Изучается возможность применения микропроцессорной техники, т. е. ЭУМ, обладакхцих сравнительно малыми ресурсами: невысоким быстродействием и ограниченным объемом оперативной памяти. В большинстве случаев, ресурсов одной вникромашины недостаточно для управления узлом коммутации. Значит, СУ должна быть многомашинной, т. е, содержать более одной микро-ЭУМ, Важнейший фактор, влияюощй на построение СУ — круг решаемых задач. Задачи, которые должны выполняться системой управления, можно разделить на две группы. К первой относятся действия, связанные с установлением соединений: прием и передача сигнальной информации, поиск пути, проключение коммутационной системы и т. п.Будем называть их технологическими задачами. Ко второй группе относятся вспомогательные операции, которые непосредственно в установлении соединений не участвуют: контроль, диагностика, — 19 тарификация и т. д. Их будем называть служебными задачами. Эти две группы задач предъявляют принципиально разные требования к ресурсам реализующих их ЭУМ. Одно из различий заключается в частоте запуска программ. Технологические задачи приходится решать при поступлении каждого вызова на АУК. Их поток может достигать единиц и даже десятков в секунду. Поэтому ЭУМ должна быть способна решать одновременно в мультипрограммном режиме множество технологических задач. Это требование ужесточается тем, что задачи должны выполняться в реальном масштабе времени. Для них допустимое время задержки от момента появления требования составляет часто десятки или сотни миллисекунд. В противоположность им, заявки на выполнение служебных задач поступают обычно редко, а допустимое время задержки достигает секунд и более. Другое различие заключается в сложности задач. Обычно технологические задачи состоят из кратких, простых действий. Служебные задачи — это сложные операции, требущие больших ресурсов ЭУМ. С этим же связаны и различия в требованиях к емкости запоминающих устройств. Объемы ЗУ, требуемые для служебных задач, значительно превосходят объемы, достаточные для выполнения технологических. Указанные различия в свойствах решаемых задач приводят при построении многомашинных СУ к распределению их реализации между разными ЭУМ. Машины, выполняющие технологические и служебные задачи, могут быть разного типа или работать в разных режимах. Приведенные качественные рассуждения иллюстрируются результатагш исследований зависимости частоты запуска зшравляющих программ от их сложности. Вид этой зависимости (рис.3) послужил — 20 одним из оснований для распределения фушщий между центральным и региональными процессорами в системе АХЕ 10. На выбор структуры СУ влияет и другой фактор — связь с исполнительным оборудованием" Из-за многочисленности исполнительных устройств сбор информации от них в единый центр обработки, а также распределение управляющих команд в обратную сторону становятся довольно сложной проблемой. Кроме того, ввод этой информации в СУ оказывается хотя и простой, но одной из самых трудоемких задач. Решение этой трудности подсказывается опытом построения самых ранних станций с программным управлением (ЕЬЫ), где функции обмена возложены на специально выделенные машины или процессоры. Теперь можно сформулировать самые общие требования к построению многомашинной СУ. Выполнение технологических и служебных задач следует разделить между разными машинами. Между исполнительным оборудованием и ЭУМ должны располагаться устройства, позволяюоще производить обмен информацией между ними по установленному для машины интерфейсу. На управляющие микромашивы следует, в первую очередь, возлагать обменные операции и начальную обработку информации. Поэто1У|у микро-ЭУМ должны иметь связи с исполнительным оборудованием. Можно допустить, что остаются некоторые не выполняемые этими микро-ЭУМ относительно сложные операции, связанные с согласованием работы различных комплектов исполнительного оборудования. Такие операции удобно возложить на единое центральное устройство, имеющее связи со всеми остальными ЭУМ. Это устройство (если оно имеется) должно выполнять задачи взаимодействия между остальными компонентами СУ. Приведенные доводы определяют следующую структуру системы — 21 управления. СУ строится по иерархическому многомашинному принципу (рис.4). На нижней ступени находятся периферийные управляющие устройства (ПУУ) — аппаратные средства, осуществляющие сбор и распределение информации. Выше располагаются периферийные управляющие модули (ПМ), которые содержат ЭУМ и осуществляют обмен информацией между аппаратурой и программами и, быть может, обработку этой информации. Еще выше расположен центральный модуль управления (ЦМ), осуществляющий те технологические операции, которые не выполняются ПМ. ЦМ может содержать более одной ЭУМ и иметь сложную структуру. Все служебные задачи внесены в специальный служебный модуль (СМ). СМ располагает обширными внешними средствами. Он может быть удален от узла коммутации. В достаточно развитых системах один СМ может обслуживать несколько АУК. Для иллюстрации правомерности предложенной структуры обратимся к обзору современных электронных узлов коммутации, приведенному в П1 и опубликованному в более полном объеме /25″ / со ссылками на материалы фирм-изготовителей. Результаты обзора объединены в табл"2. Отвлекаясь от технических подробностей, можно сказать, что все системы, рассмотренные в обзоре, описываются выбранной моделью. Это объясняется общими тенденциями развития управляющих систем, общностью состава исполнительного оборудования и содержания технологических задач. Во всех системах заметен значительный удельный вес ЦМ, что можно объяснить, очевидно, преемственностью опыта создания управляющих систем на квазиэлектронных АУК. Бели в общих чертах рассмотренные системы управления схожи, то в деталях они различаются между собой весьма существенно. Различия проявляются в количестве модулей управления. Так, в оконеч" - 22 Степень Сложности Высокая Uuihiap ®f (r). ^ ® иизшя Щ/шции це/^тральиого процессора.1. Лна/7а5 ошибом.2. /IpoSep/^a состояния лииай.3. ^прабмис!^. састсмой синхронизации.4', Озмеиеше да/ниык абонента.5. У^/ёт стоимости. По-разному происходит обмен информацией между управляющими модулями и оборудованием. В одних случаях Щ имеет доступ к исполнительным устройствам {VTNi), в других — информация в ЦМ поступает только пройдя обработку в Ш (системаЭХ220). Весьма различаются способы распределения обязанностей между згправлякхцими модулями. В некоторых системах каждый модуль исполняет строго определенные функции для всей станцииодин управляет приемом линейных сигналов, другой — приемом номера, третий — передачей и коммутацией (в станции 3) ST'(). В других системах (АХЕ 10) региональный процессор обслуживает ограниченную часть единообразного оборудования. Отличаются системы и глубиной обработки информации в периферийных модулях. В СУ станции tHSI, например, периферийные процессоры производят лишь савлую начальную примитивную обработку поступающей сигнальной информации, а процессор управления линиями в системе СТА Proteo осуществляет прием цифр декадного набора. В системах применяются и различные способы обеспечения надежности: дублирование с синхронной работой процессоров (NEAK e i)^ резервирование по системе т-'-л (ЪТЫ4) и т. п.Перечисление различий можно было бы продолжить, однако и приведенного достаточно для того, чтобы, сделать вывод о том, что оптимальная организация СУ в настоящее время не найдена и требует изучения.9 NEAX-8I Япония ЛЕСПроцессоры обработки сигналов: контроллер линейных сигналовблок управления регистровой сигнализации устройство управления КС Обнаружение линейных си лов Шделение сигналов мног частотного кода Преобразование команд д КС I ! 2 ! -Центральный проОсновные функции уп цеооор 10 АХЕ -10 Эрикоон, ШвецияРегиональные процессорыЦентральный процессор Проотейшая предвари обработка информаци пределение для груп рудования Основные функции уп II МТ -20 -Периферийные процессоры Управление ступенью ^ ^ нентского искания. Франция ная обработка сигна TtUfoft информации. Маркеры TomsoaЦентральное управУправление всей сис ляицее устройство, а также тарификация нительные услуги, с статистики 12 ITT-I240 1ТТТерминальные проОбработка сигнально цессоры формацииВспомогательные Управление фазами у процессоры ления соединенияУстройства управУправление коммутац ления полем — 28 несенные в СМ, практически не рассматриваются. Задача заключается в поиске лучшего распределения функций между модулями и рационального способа поддержания надежной работы СУ. В исходной структуре, крсяяе множества промежуточных вариантов, имеются два крайних, вырожденных случая. В первом случае на ПМ не возлагается никаких функций, тогда СУ вырождается в полностью централизованную систему, без ПМ. В другом крайнем случае функции не возлагаются на Щ и СУ превращается в полностью децентрализованную структуру.1.3. Критерий оптимизации организации системы управления узлом коммутации Как следует из обзора систем управления уздами коммутации, существует множество способов их организации. Разработчику СУ при выборе ее организации приходится пользоваться самыми различными показателями, характериззгюпщми свойства системы. Для сопоставления способов организации необходимо, чтобы различные показатели были сведены к общему критерию, характеризующевду систему в целом, Задавшись некоторым общим критерием оптимизации и разбивая его на частные критерии, оценивакхцие разные стороны системы, мы проводим формирование набора критериев «сверху вниз» / 55 /.Наиболее общими критериями, оценивающими эффективность внедрения новой техники, являются экономические. При сравнении вариантов обычно учитывают положительный эффект (например, увеличение количества выпускаемой продукции) и затраты, связанные с внедрением. В рассматриваемом нами случав продукция — это — 29 обслуженные телефонные вызовы. Их поток ограничен развитием сети связи и планируется на далекую перспективу. Разработчики АУК, в частности СУ, так же, как эксплуатирующие организации, обязанные выдерживать допустимые нормы потерь вызовов, практически не способны повлиять на количество обслуживаемых вызовов. В то же время затраты, связанные с обслуживанием вызовов, в значительной степени зависят от разработки АУК и его эксплуатации. Поэтому для сравнения различных случаев организации СУ достаточно учесть только затраты. При этом необходимо учитывать как стоимость оборудования, так и затраты на его эксплуатацию. Поэтому, в соответствии с применяемой в настоящее время методикой для определения экономической эффективности разных видов техники /-^3/, примем в качестве главного критерия оптимизации организации СУ годовые приведенные затратыпр: где: N — единовременные капитальные затратыЕн — нормативный коэффициент эффективности- 9 — эксплуатационные расходы. Определим капитальные затраты исходя из того, что функции СУ состоят из трех основных операций: — обмена, включающего сбор информации от исполнительного оборудования, пересылку сообщений между ЭУМ, входящими в состав СУ, и выдачу управляющих приказов- - обработки информации процессорами- - хранения информации: данных, программ и микропрограмм. Все эти операции выполняются разными аппаратными средствами. В связи с этим минимальные капитальные затраты в СУ можно подразделить на три главные составляющие: Ковш — затраты, овя- 30 занные с обменными операциямиКОБР связанные с процессом обработки- /^ з** - связанные с хранением информации в запоминающих устройствах. Минимально требуемые затраты представляют собой сумму этих составляющих: В реальной системе затраты не бывают минимальными. Для обеспечения надежности вводится аппаратурная избыточность. Будем считать, что для СУ существует некоторый средний коэффициент избыточности в^- такой, что: Выразим слагаемые, входящие в это выражение, через показатели, оценивающие сложность аппаратных средств СУ. Затраты, связанные о обменом KosAt суммируются из затрат на каждую связь, т. е. на обеспечение обмена для каждой пары взаимодействующих устройств. Для каждой такой связи затраты будем считать пропорциональными интенсивности потока обмена между ними: где Qij — количество информации, пересылаемой в единицу времени между L-M и J-M устройствамиcLtj — коэффициент пропорциональности. Суммирование производится по всем парам. /Совгл суммируется из стоимостей всех процессоров, входящих в состав СУ. В соответствии с /вб*/ примем, что стоимость 1-го процессора составляет 1}де: <5^- стоимостной коэффициентNf количество элементов, входящих в процессор, т. е. показатель его сложности. В число ЗУ включаем запоминающие устройства программ, данных, а также микропрограмм в случае микропрограммного управления процессором. Итак, капитальные затраты можно выразить следующим образом: Гб) — 32 Эксплуатационные затраты 9, в соответствии о /-^3/, представляют собой сумму: гдеЗАРПА. — заработная плата персонала плюс отчисления на социальное страхование- /Л •^ Аморт — затраты на амортизацию оборудования, запасные части и материалы-ЭА — затраты на электроэнергию, получаемую со стороны-проч — прочив административные, управленческие и хозяйственные расходы. Персонал, эксплуатирующий СУ, призван поддерживать работоспособность оборудования. Доля эксплуатационных затрат, зависящая от организации СУ, — •^ДЙПА- «включает в себя расходы на мероприятия по поддержанию его работоспособности. СУ предназначено для работы в течение длительного срока. Учитывая ненадежность его компонент, необходимо предусмотреть восотановление отказывающих устройств. Требования, выдвигаемые к надежности СУ, весьма строгие, поскольку от его исправности зависит работа всего АУК. Поэтому СУ должна быть быстро восстанавливаемой, т. е. такой, для которой вероятность пребывания в неисправном состоянии более одного блока пренебрежимо мала. Это означает, что затраты на ремонтно-воостановительные работы СУ приходятся не столько на сами эти работы, сколько на готовность к ним. Степень готовности к ремонтным работам можно оценить средним временем восстановления «Ьв, или интенсивностью восстановления ь^^4г • Время устранения неисправности можно считать состоящим из трех слагаемых: времени обнаружения неисправности, времени задержки от момента обнаружения до начала работ по устранению, времени, затраченному на замену неисправного устройства. Благо- 33 даря программному управлению первое из этих слагаемых может быть очень малым, порядка долей секунды. Наличие управляющей машины позволяет также быстро локализовать неисправность. Работа по замене отказавшего блока на исправный сравнительно несложная операция, длительность которой составляет минуты. Весьма существенным слагаемым в этих условиях оказывается время от момента обнаружения неисправности до момента начала замены. Оно зависит от численности персонала, его местонахождения, сменности работы и других подобных факторов, влияющих на эксплуатационные затраты. Воли СУ построена так, что допустимое среднее время восстановления составляет 1−2 часа, то необходимо круглосуточное пребывание персонала вблизи СУ. При увеличении этого времени до нескольких часов возможно пребывание персонала на удаленном расстоянии от СУ. Тогда можно организовать централизованную эксплуатацию нескольких ЛУК, приводящую к сокращению затрат на восстановление. В случав, когда допустимое время восстановления превышает Х0-Д2 часов, становится возможным исклкь чение некоторых смен работы. Это ведет к дальнейшему сокращению эксплуатационных затрат. Затраты на устранение отказа являются неубывающей функцией от интенсивности восстановления, В первом приближении будем считать их пропорциональными. Благодаря аддитивности оценки вое исследование можно вести отдельно по каждому из критериев, а в заключение полученные результаты суммировать. Исследование минимально требуемой сложности оборудования, т. е. безызбыточных капитальных затрат, производится во 2 главе, а факторов, обеспечивающих надежную работу узла коммутации, в 3 главе.1.4. Вавот» I. Как показал обзор систем управления узлами коммутации — 37телефонных каналов, тенденция их развития заключалась в переходе от децентрализованных систем к централизации управляющих функций с целью повышения степени использования управляющих устройств. На современном этапе, в связи с появлением БИС запоминающих устройств и микропроцессоров, развитие СУ вновь обращается к децентрализации управления, но на качественно но.
Основные результаты работы состоят в следующем:
1. Автор провел анализ развития систем управления узлами коммутации телефонных каналов и показал, что наиболее перспективными следует считать многомашинные системы с использованием микро-ЭШ. На основании анализа диссертантом выбрана основная структура системы управления, построенная по иерархическому принципу, в соответствии с которым на верхней ступени располагается центральный модуль управления, далее — ряд периферийных модулей, а на границе между исполнительным оборудованием и периферийными ЭУМ — аппаратные периферийные устройства управления. Функции, не связанные непосредственно с обслуживанием телефонных вызовов, вынесены в специальный служебный модуль управления. Данная модель включает два вырожденных случая: централизованную и полностью децентрализованную системы. (Раздел 1.1- 1.2. Приложение I).
2. Автор использовал в качестве критерия оптимизации организации систем управления приведенные затраты и предложил согласованную с ним систему частных критериев. Приведенные затраты выражаются как функция от параметров потоков обмена, требуемого быстродействия процессоров, объемов памяти, вводимой аппаратной избыточности, параметра потока отказов и требуемой скорости восстановления. Благодаря аддитивности принятой системы критериев оптимизация организации СУ сводится к решению ряда частных задач пониженной размерности, что упрощает значительно выполнение задачи в целом. (Раздел 1.3).
3. В результате анализа технологического алгоритма обслуживания телефонных вызовов предложена его формализованная модель, заключающаяся в следующем. Процесс обслуживания изолированного вызова представляет собой последовательность практически независимых фаз. Фаза проходит многоэтажное обслуживание, причем появление требования на выполнение очередного этапа при условии выполнения предыдущего этапа происходит с вероятностью, меньшей единицы. Исследование модели показало, что оптимальной по капитальным затратам является такая организация управления, когда любая фаза обслуживания вызова выполняется модулем управления полностью, без рассечения. (Глава 2. Приложение 2).
4. В соответствии с предложенным критерием оценки эксплуатационных затрат диссертант показал, что оптимальный способ поддержания надежности модуля системы управления зависит от доли времени высокой нагрузки и отношения стоимости единицы аппаратуры к эксплуатационным затратам при единичной интенсивности восстановления. (Раздел 3.2, 3.3).
5. Рассмотрение многомодульных структур СУ показало, что в ряде практически важных случаев наилучшей по приведенным затратам является система управления, в которой каждый модуль выполняет все функции по обслуживанию вызовов для ограниченного пучка каналов. При этом вызов обслуживается не более чем двумя модулями управления, что позволяет свести к минимуму потери вызовов по причине отказа управляющего модуля. (Раздел 3.4).
6. Рассмотрен микропрограммный принцип управления процессорами, позволяющий эмулировать на микро-ЭВМ системы команд больших управляющих машин, благодаря чему сохраняется программная совместимость систем управления. Разработана система адресных микрокоманд, позволившая на рабочем макете СУВК Нева-2 снизить на одну треть емкость соответствующей части памяти микропрограмм. (Раздел 4.1).
7. Предложено ввести групповые точки в сканирующее устройство, что снижает машинные затраты на обмен между системой управления и телефонным оборудованием в ряде случаев более чем в 5 раз. (Раздел 4.2).
8. На основе полученных теоретических положений автор построил систему управления для электронного УАК с применением микро-ЭВМ «Электроника-60И. Разработана система программного обеспечения управления процессом обслуживания вызовов. Показано, что указанная ЭВМ способна обслужить узел емкостью не менее 240×2 междугородных каналов. (Раздел 4.3).
9. Результаты диссертации использованы:
— при разработке специализированного управляющего вычислительного комплекса «Нева-2» на этапе выработки принципов построения управляющих вычислительных машин для управления системами коммутации;
— при разработке системы управления импульсно-временного транзитного узла на этапе создания эскизного проекта;
— в разработке электронного узла коммутации на этапе эскизно-технического проекта при создании испытательного комплекса и проведения автономных, комплексных и линейных испытаний.
Использование результатов диссертации подтверждено прилагаемыми актами о внедрении (Приложение б).
ЗАКЛЮЧЕНИЕ
.
Список литературы
- Материалы ХХУ1 съезда КПСС. М.: Политиздат, 1981. с. 173.
- Аваков Р.А., Гольдберг Л. М., Игнатьев В. О. Электронные управляющие машины. М.: Связь, 1979. 254 с.
- Автоматические системы коммутации / Под ред. О. Н. Ивановой. М.: Связь, 1978. 624 с.
- Аджемов С.А., Мисуловин Л. Я., Парилов В. П. Общие принципы построения ИКЭ АЦСС. Электросвязь, 1975 № 10, с.4−7.
- Артамонов П.Т. Анализ производительности ЦВМ методами теории массового обслуживания. М.: Энергия, 1972. 176 с.
- Комплекс оборудования ЖЭ АЦСС / Бакланов Ю. А., Дьячков В. Н., Макаров В. В. и др. Электросвязь, 1975, № 10 с.8−12.
- Анализ системы операций управляющих устройств с записанной программой для коммутационных станций / Бакланов Ю. А., Бурав-цев В.М., Ворона А. Д. и др. Электросвязь, 1977 .? 7, с.44−48.
- БашаринГ.П., Харкевич А. Д., Шнепс М. А. Массовое обслуживание в телефонии. М.: Наука, 1968. 246 с.
- Башарин Г. П. Таблицы вероятностей и средних квадратических отклонений потерь на полнодоступном пучке линий. М.: Изд ВО АН СССР, 1962. 128 с.
- Бескинд А.А., Шляпоберский В. И., Штагер В. Г. Построение и использование управляющих комплексов семейства «Нева». -Электросвязь, 1979, № 7, с.18−22.
- Бронштейн О.И., Духовный И. М. Модели приоритетного обслуживания в информационно-вычислительных системах. М.: Наука, 1970. 220 с.
- Булей Г. Микропрограммирование. М.: Мир, 1973. 128 с.
- О единой системе показателей надежности и качества функционирования коммутационных узлов и станций / Буров П. Н., Дедоборщ В. Г Сметанин Л. Ф., Суторихин Н. Б. Электросвязь, 1978, № 12, с.5−8.
- Бурцев A.A. Исследование последовательностных свойств телефонных алгоритмов и влияние их на структуру ЦУУ. В кн.: Сборник научных трудов / ЦНИИС. М., 1975, вып.1, с.52−56.
- Бурцев A.A. К вопросу структурной организации и оценки информационных потоков функционирования ЦУУ систем коммутации. Б кн.: Вычислительные средства в технике и системах связи. М., 1976, вып.1, с.17−22.
- Бурцев A.A. Исследование некоторых вопросов организации и функционирования управляющих комплексов квазиэлектронных систем коммутации каналов (на примере КЭ АМТС): Диссертация на соискание ученой степени к.т.н. / ЦНИИС. М., 1976. 247 с.
- Бурцев A.A. Обоснование структуры и режимов работы управл. комплексов систем коммутации. Электросвязь, 1981, $ 10, с.20−23.
- Вайнзоф Л.А. Методика расчета производительности периферийной управляющей ЭВМ на узле коммутации каналов. Б кн.: Методыи структуры систем телетрафика. М.: Наука, 1979, с.168−176.
- Вайнзоф Л.А., Горшков С. Г. Моделирование одной из систем массового обслуживания. В кн.: Вычислительные средства в технике и системах связи. М.: Связь, 1973, с.140−144.
- Вайнзоф Л.А. Поддержание качества обслуживания вызовов на узле коммутации с программным управлением. Сборник научных трудов / ЦНИИС. М., 1978, вып.2, с.26−33.
- Вайнзоф Л.А. Зависимость нагрузки на устройства управленияот распределения функций между управляющими машинами. Сборник научных трудов / ЦНИИС. М., 1978, рып.1, с.62−64.
- Вайнзоф Л.А. Эффективность поддержания качества обслуживания вызовов на узлах коммутации. В кн.: Специализированные сети передачи данных общего пользования: Сборник научных трудов / ЦНИИС. М., 1980. с.100−104.
- Вайнзоф Л.А. Направления развития программных устройств управления на телефонных станциях. Зарубежная техника связи. Серия: телефония, телеграфия, передача данных: Экспресс-информация. М., 1979, еып.2, с.1−13.
- Ваинзоф Л.А. Управляющие комплексы на электронных узлах коммутации. Зарубежная техника связи. Серия: телефония, телеграфия, передача данных: Экспресс-информация. М., 1981, вып. П, с.1−30.
- Вайнзоф Л.А., Кирсанова Л. В. Организация микропрограмм в ПЗУ управляющего комплекса узла коммутации. В кн.: Всесоюзный научно-технический симпозиум «Применение ЭВМ в коммутационной технике" — Тезисы докладов. М., 1976, с. 53.
- Вайнзоф Л.А. Сравнение двух видов избыточности в устройствах управления на узлах коммутации. В кн.: Всесоюзная научно-техническая конференция «Повышение качества и надежности сетей связи и их элементов»: Тезисы докладов. Новосибирск, 1978, с.21−25.
- Вайнзоф Л.А. Выбор структуры многопроцессорного устройства управления узлом коммутации телефонных каналов. В кн.: Всесоюзный научно-технический симпозиум «Применение ЭВМ в коммутационной технике»: Тезисы докладов. М., 1980, с.14−15.
- Вайнзоф Л.А. 0 нормировании надежности управления на узлах коммутации. В кн.: Надежность и качество функционированияинформационных сетей и их элементов: Тезисы докладов 1У Всесоюзной научно-технической конференции. Новосибирск, 1981, с. 42.
- Вайнзоф Л.А. 0 распределении функций в управляющем комплексе на узле коммутации. В кн.: Всесоюзное научно-техническое освещение «Совершенствование средств автоматической коммутации в ЕАСС»: Тезисы докладов. — Радио и связь, 1982, с. 32.
- Вайнзоф Л.А. Испытательный комплекс рабочего макета АКЭ.
- В кн.: Всесоюзное научно-техническое совещание «Совершенствование средств автоматической коммутации в ЕАСС»: Тезисы докладов. Радио и связь, 1982, с. 68.
- Гнеденко Б.В., Беляев Ю. К., Соловьев А. Д. Математические методы в теории надежности. Основные характеристики надежности и их статистический анализ. М., Наука, 1965. 524 с.
- Гольдштейн Б.С. Тенденции развития операционных систем коммутационных узлов и станций с программным управлением. -Зарубежная техника связи. Серия: телефония, телеграфия, передача данных. Экспресс-информация. М., 1980, вып. П, с.1−19.
- Горелик М., Карасева Е. О. 0 нормативах и оценке народнохозяйственной эффективности междугородной телефонной связи. -Вестник связи. 1975, № 8, с.15−17.
- Горшков С.Г. Обмен информацией между телефонной перифериейи специализированной управляющей машиной в КЭ АМТС. В кн.: Сборник научных трудов / ЦНИИС. М., 1974, вып.2, с.27−31.
- Горшков С.Г. Исследование аппаратного тракта обмена в КЭ АМТС. В кн.: Сборник научных трудов / ЦНИИС. М., 1975, вып.2, с.46−52.
- Горшков С.Г., Кащеева Л. А. Программный тракт обмена управляющей информацией в КЗ АМТС. В кн.: Сборник научных трудов / ВДИИС, М., 1976, вып.1, с.63−68.
- Гурвиц В.М., Дворецкий В. М. Модульный принцип построения узлов коммутации с программным управлением. В кн.: Сборник научных трудов / ЦНИИС. М., 1975, вып.1, с.41−47.
- Давыдов Г. Б., Рогинский В. Н., Толчан А. Я. Сети электросвязи. М., Связь, 1977. 360 с.
- Давыдов Г. Б. Теория сетей связи. ГЛ., Связь, 1981. 284 с.
- Евреинов Э.В., Хорошевский В. Г. Однородные вычислительные системы / Отв.ред. С. Д. Пашкеев. Новосибирск: Наука. Сибирское отделение, 1978. 320 с.
- Ершова Э.Б. Распределение функций управления на локальной интегральной сети связи. Электросвязь, 1980, № 9, с.25−29.
- Есиков С.Р. Методы и практика расчетов экономической эффективности новой техники связи. М., Связь, 1980. 73 с.
- Иванова О.Н. Электронная коммутация. М., Связь, 1971. 295 с.
- Иванова О.Н., Попова А. Г., Соловой В. В. Управляющие устройства квазиэлектроншх коммутационных систем. М., Связь, 1975, 207 с.
- Иванова О.Н. Научные аспекты автоматической коммутации. -Электросвязь, 1976, № 3, с.6−10.
- Иванова О.Н., Попова А. Г. Структура коммутационного узла с электронным управлением. Электросвязь, 1980, № 8, с.12−16.
- Ионин Г. Л., Седол Я. Я. Таблицы вероятносных характеристик полнодоступного пучка при повторных вызовах. М., Наука, 1970. 166 с.
- Игнатьев В.О., Алексеев Б. Е., Россиков В. В. Программное обеспечение АТС. М., Радио и связь, 1981. 176с.
- Игнатьев В.О., Сафронов В. Д., Чагаев Н. С. Оценка пропускной способности управляющих устройств узлов коммутации. -Электросвязь, 1981, № 10, с.22−26.
- Иодан Э. Структурное проектирование и конструирование программ. М., Мир, 1979. 410 с.
- Кнут Д.Э. Искусство програмирования для ЭВМ. М., Мир, 1976, т.1, 735 с.
- Кини Р.Л., Райфа X. Принятие решений при многих критериях: предпочтения и замещения. М., Радио и связь, 1981. 560 с.
- Козлов Б.А., Ушаков И. А. Справочник по расчету надежности аппаратуры радиоэлектроники и автоматики. М., Сов. радио, 1975. 472 с.
- Козлов Б.А. Резервирование с восстановлением. М., Сов. радио, 1969. 280 с.
- Колин К.К., Липаев В. В. Проектирование алгоритмов управляющих ЦВМ. М., Сов. радио, 1970. 343 с.
- Кухарчук А.Г., Никитин А. И., Струтинский JI.A. Некоторые пути развития структуры процессоров управляющих ЦВМ. Управляющие системы и машины, 1976, № 6, с. 22−26.
- Кухарчук А.Г., Никитин А. И., Струтинский JI.A. Управляющий комплекс для коммутационных систем связи «Нева-IM». Управляющие системы и машины, 1982, № 5, с.11−16.
- Кравцов Л.Я., Черницкий Г. И. Проектирование микропрограммных устройств управления. Энергия, 1976. 150 с.
- Лазарев В.Г., Пийль Е. Й., Турута Е. Н. Программное управление на узлах коммутации. М., Связь, 1978. 264 с.
- Лазарев В.Г. Электронная коммутация и управление в узлах связи, М., Связь, 1974. 272 с.
- Лившиц Б.С., Пшеничников А. П., Харкевич А. Д. Теория телетрафика. М., Связь, 1979. 224 с.
- Лившиц Б.С., Фидлин Я. В. Системы массового обслуживания с конечным числом источников. М., Связь, 1963. 168 с.
- Лев Ю.М., Стерлина Э. И. Оптимальная величина потерь на местных телефонных сетях. Электросвязь, 1976, № 12 с.53−55.
- Липаев В.В. Распределение ресурсов в вычислительных системах. М., Статистика, 1979. 248 с.
- Липаев В.В., Колин К. К., Серебровский Л, А. Математическое обеспечение управляющих УЕМ. М., Сов. радио, 1972. 528 с.
- Майоров С.А., Новиков Г. И. Принципы организации цифровых машин. Л., Машиностроение, 1974. 431 с.
- Мартин Дж. Системный анализ передачи данных. М., Мир, 1974. Т.2. 432 с.
- Методика определения экономической эффективности использования в народном хозяйстве новой техники, изобретений и рационализаторских предложений. М., 1977. 36 с.
- Мисуловин Л.Я. Структура управляющих устройств с записанной программой для АТС. Электросвязь, 1977, № 2 с.20−24.
- Мисуловин Л.Я., Бакланов Ю. А., Силиныш Я. Я. Обеспечение надежности интегральной аналого-цифровой системы связи ЕСС АЦ «Исток». Электросвязь, 1982, & 9 с.4−8.
- Мультипроцессорные вычислительные системы / Под ред. Хата-гурова Я. А. Энергия, М., 1971. 320 с.
- Нетес В.А. Выбор обобщенных показателей надежности сетей связи. Электросвязь, 1981, № 5, с.48−51.
- Пашкеев С.Д. Основы мультипрограммирования для специализированных вычислительных систем. М., Сов. радио, 1972. 184 с.
- Пашкеев С.Д. Применение мультимикропро цес сорных систем в системах коммутации. Электросвязь, 1982, № 12, с.48−50.
- Поспелов Д.А. Введение в теорию вычислительных систем. М., Сов. радио, 1972. 288 с.
- Применение БИС в автоматизированных телефонных аппаратах с кнопочным набором.- Электроника, 1977, т.50, № 7, с.17−18.
- Райфа Г. Анализ решений. Введение в-проблему ьыбора в условиях неопределенности. М., Наука, 1977. 320 с.
- Руководящий документ по общегосударственной системе автоматизированной телефонной связи (ОГС ТФС). М., 1980. 280 с.
- С^жба связи. Правда, 1982, 9 марта, с. 1.
- Суторихин Н.Б. Оценка надежности элементов коммутируемых телефонных сетей. М., Связь, 1974. 232 с.
- Суторихин Н.Б., Буров П. Н., Захарова С. М. Методы определения оптимальной надежности элементов се&ей связи. М., Связь, 1979. 103 с.
- Суторихин Н.Б., Голомшток Л. В., Зарецкий К. А. Надежность электронных коммутационных узлов и станций. М., Радио и связь, 1981. 200 с.
- Уэйкарли. Повышение надежности микро-ЭВМ путем тройного резервирования модулей. ТИИЭР, 1976, т.64, В 6, с.37−41.
- Харкевич А.Д., Самхарадзе Т. Г., Ситников С. Г. Расчет мцого-звеньевых коммутационных схем для квазиэлектронных АТС, М., Связь, 1978. 51 с.
- Хассон С. Мшфоцрограмное управление. М., Мир, 1973, вып.1. 240 е.- 1974, вып.2. 477 с.
- Хиллс М.Т., Капо С. Программирование для электронных систем коммутации. М., Связь, 1980. 248 с.
- Шнепс-Шнеппе М. А. Численные методы теории телетрафика. М., связь, 1974. 232 с.
- Шнепс М.А. Системы распределения информации. Методы расчета. М., Связь, 1979. 342 с.
- Шнепс М.А. Некоторые задачи управления телефонной сетью. -Электросвязь, 1980, № I, с.21−25.
- Электронная вычислительная машина «Электроника-60»: кн. З Техническое описание и инструкция по эксплуатации. М., 1981. 220 с.
- Эллдин А., Линд Г. Основы теории телетрафика. М., Связь, •. 1972. 199 с. 33. belvl ЗЛУ 40-d to LI telepbon Swi/tc-Klng system control ргосеадоу.- Idd Яеа.,
- J. Sp-c centvat control complex, —8oc.7