Улучшение характеристик датчиков измерения слабых магнитных полей для систем управления
Индукция магнитного поля Земли составляет величину порядка 40−103 нТл (0,4 Гс) и относится к слабым магнитным полям. Измерение величины и направления индукции магнитного поля осуществляется с помощью специальных систем — магнитометров. Магнитометры представляют собой сложные технические устройства, состоящие из нескольких узлов (элементов). Основой любого магнитометра является датчик магнитного… Читать ещё >
Содержание
- Обозначения и сокращения
- Елава 1. Магнитоэлектронный СВЧ генератор как датчик 19 измерения слабых магнитных полей
- 1. 1. Принцип работы и конструкция магнитоэлектронных датчиков
- 1. 2. Расчет параметров магнитроэлектронных датчиков с использованием САПР «Microwave Office 2002»
- 1. 3. Методика обработки показаний датчиков и проблемы настройки и калибровки
- 1. 4. Использование системы магнитоэлектронных 48 датчиков в качестве магнитного компаса и определителя вектора магнитного поля Земли
- Елава 2. Исследование природы нестабильностей показаний 63 магнитоэлектронных датчиков
- 2. 1. Долговременная и кратковременная 63 нестабильности показаний датчиков
- 2. 2. Повышение устойчивости показаний магнитометра 71 к изменениям температуры при применении разностного датчика
- Елава 3. Использование немагнитных экранов для подавления кратковременных (импульсных) магнитных помех
- 3. 1. Исследование кратковременных (импульсных) 78 изменений показаний датчиков
- 3. 2. Теоретическая модель возможности подавления 84 импульсных и ВЧ магнитных помех немагнитными проводящими экранами (кольцами)
- 3. 3. Экспериментальное исследование подавления ВЧ и 93 импульсных помех немагнитными проводящими экранами
Улучшение характеристик датчиков измерения слабых магнитных полей для систем управления (реферат, курсовая, диплом, контрольная)
Системы управления находят применение практически во всех областях науки и техники. К системам управления относятся системы, позволяющие ориентироваться в пространстве (навигационные системы). Для некоторых других систем управления требуется определение железосодержащих объектов и залежей железной руды под земной поверхностью или под водой по аномалиям магнитного поля (магниторазведка), а определение малых девиаций магнитного поля используется в дефектоскопии. Источником информации в таких системах является магнитное поле Земли, относящееся к слабым о магнитным полям (В ~ 40−10 нТл (0,4 Гс)). Возникает необходимость в определении величины и направления магнитного поля Земли в различных ее частях, т. е. требуются магнитные карты, привязанные к географической карте. Первая попытка составления таких карт была предпринята в XVIII веке известным немецким ученым Карлом Гауссом. В настоящее время такие магнитные карты составлены практически для всех районов Земли.
Особенно сложные задачи возникали в навигации при движении в местности, лишенной ориентиров и при мореплавании (navigatoмореплавание, лат). Использование математики, астрономии, механики и других наук в интересах навигации позволило развить научные основы кораблевождения и разработать ряд приборов и инструментов для средств навигации и управления.
Навигационные устройства предназначены для измерения параметров движения объектов относительно Земли, небесных тел или окружающей среды на всех этапах процесса управления движением подводных лодок, надводных кораблей, сухопутного транспорта, самолетов, ракет, космических кораблей и инопланетных роботов. Чем труднее и сложнее условия навигации объекта, тем большей становится роль навигационных устройств.
Благодаря использованию новейших достижений в области науки и техники стали применяться все более разнообразные и совершенные навигационные устройства, основанные на автономных и неавтономных методах измерения.
Для осуществления навигации объект должен располагать определенными средствами для получения первичной информации (датчиками), устройствами для ее обработки (преобразующими и вычислительными устройствами), устройствами отображения информации и органами управления, некоторым объемом памяти, достаточным запасом сведений об окружающем пространстве и о методах выполнения навигационных измерений. У технических объектов — подводных лодок, кораблей и др. — первичная навигационная информация получается с помощью датчиков, а обработка их сигналов осуществляется счетно-решающими устройствами. Эти же устройства снабжаются определенным объемом памяти, в которую задаются необходимые сведения об окружающем пространстве и программы выполнения навигационных измерений.
Суть навигационного процесса заключается в том, что с помощью датчиков первичной информации измеряются различные физические параметры, зависящие от положения и движения относительно внешних предметов или физических полей. Устройства для обработки информации на основании полученных сигналов определяют навигационные параметры, характеризующие скорость и координаты местонахождения объекта относительно принятой системы отсчета. Измеренные данные сравниваются с намеченной программой движения, и всякие отклонения от программы преобразуются в сигналы команд на систему управления движением объекта. Благодаря этому объект может двигаться по заданной или желаемой траектории с небольшими отклонениями от нее.
Задачами навигации принять считать:
1. предварительное определение навигационной программы и траекторий движения объекта с учетом возможностей имеющегося измерительного оборудования, предполагаемых внешних условий и времени движения;
2. определение методов навигационных измерений, исходной и начальной навигационной информации и средств коррекции ошибок измерений, которые могут быть наиболее эффективными в планируемых условиях движения объекта;
3. выполнение измерений и обработка навигационной информации в процессе движения объекта;
4. обнаружение пространственно-временнных отклонений от заданной программы движения и выработка команд для управления объектом [1−4].
Одним из видов современных навигационных систем являются магнитные навигационные системы. Несмотря на то, что по точности определения местоположения объекта они уступают спутниковым навигационным системам, магнитные навигационные системы имеют и ряд достоинств. Главным из них является автономность, т. е. независимость от каких-либо внешних источников информации. В большинстве случаев на движущихся объектах магнитная навигационная система используется как дублирующая или запасная, тогда когда невозможно получить сигнал со спутника (под землей, в тоннелях, плохих погодных условиях и т. д.). Магнитные навигационные системы в качестве первичной информации используют параметры магнитного поля Земли [5−7].
Под параметрами магнитного поля принято понимать скалярные и векторные величины, характеризующие магнитное поле. К ним относятся вектор магнитной индукции, градиент вектора магнитной индукции grad В, градиент модуля магнитной индукции grad I в| и др. Обычно непосредственно измеряемыми параметрами магнитного поля являются скалярные величины: модуль вектора магнитной индукции I В| или его составляющие В&bdquoпроизводные этих величин, функционально связанные с указанными векторными величинами и дающие возможность определить топографию и степень неоднородности магнитного поля, а также характер его изменения во времени.
Индукция магнитного поля Земли составляет величину порядка 40−103 нТл (0,4 Гс) и относится к слабым магнитным полям. Измерение величины и направления индукции магнитного поля осуществляется с помощью специальных систем — магнитометров. Магнитометры представляют собой сложные технические устройства, состоящие из нескольких узлов (элементов). Основой любого магнитометра является датчик магнитного поля — устройство, создающее электрический сигнал, характеристики которого зависят от величины индукции магнитного поля (обычно одной из его проекций на некоторое выделенное направление). Для получения такого сигнала (сигнала-отклика) необходим источник энергии, так как индукция магнитного поля относится к пассивным величинам, которые непосредственно не создают сигнал измерительной информации. В магнитометре также должно быть устройство, измеряющее этот сигнал-отклик и устройство отображения, переводящее электрический сигнал в численное значение измеряемой индукции магнитного поля. В магнитометре также должны быть предусмотрены устройства его настройки и калибровки.
Применение магнитометров для навигации очень перспективно. Разработан целый ряд конструкций магнитных компасов с высоким разрешением по углу, на основе которых создаются схемы управления движением различных аппаратов [8−19].
Магнитометры находят широкое применение не только в магнитной навигации, но и в других областях современной науки и техники. В космологии большой интерес представляет изучение магнитного поля Луны, планет и других космических объектов. В геофизике магнитометрия используется для составления магнитных карт Земли, отслеживания изменений магнитного поля во времени, вызванных причинами космического, геологического и атмосферного происхождения, предсказания возможности землетрясений и так далее. Магнитометры применяются в геологоразведке для поиска полезных ископаемых по локальным аномалиям магнитного поля Земли. В материаловедении магнитометры используются для измерения некоторых параметров магнитных материалов, а также для определения вкраплений магнитных материалов в немагнитные. Разработан целый ряд приборов для магнитной дефектоскопии различных конструкций, в частности, стальных трубопроводов [20−30].
Тенденция к расширению сфер применения магнитных датчиков привела к их проникновению в различные области науки и практической деятельности. В настоящее время магнитометрия широко применяется в химии, биофизике и даже медицине. Есть сообщения о получении магнитокардиограмм и магнитоэнцефалограмм человека. Всё это стимулирует проведение работ по совершенствованию конструкций и повышению характеристик магнитометров.
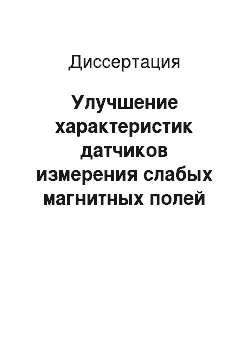
В настоящее время требуется измерение индукции постоянных магнитных полей в диапазоне от 10″ 16 (магнитный вакуум) до 30 Тл, переменных — от 10~15 до нескольких тесла в диапазоне частот от долей герца до десятков мегагерц. Существуют различные типы датчиков, служащие для измерения магнитных полей, основными из которых являются: магнитомеханические, индукционные, гальваномагнитные, магниторезонансные, феррозондовые, магниторезистивные, а также типа SQUID (Superconducting Quantum Interference Devices — квантовые интерференционные устройства на основе сверхпроводимости)[31−32, 34−44, 47]. На рис. 1 показано распределение по чувствительности некоторых типов магнитных датчиков. В Приложениях 1−4 приведены сведения о различных типах датчиков магнитных полей — их принципе работы, областям применения, точностным характеристикам и стоимости.
СКВИД магнитометр ы.
Матнитор ез онансные.
Феррозонды Помехи в условиях гор ода.
Матнитор ез ис тивны е.
Датчики Магнитное Холла поле 3 емли яятяя ШЯШ.
КГ 1(Г5 К)-4 ю-3 1(Г2 КГ1 10° Ю1 102 103 ю4 Ю5.
В, нТл.
Рис. 1.
Довольно широкий класс приборов для измерения магнитного поля представляют магниторезонансные магнитометры, принцип действия которых основан на явлении магнитного резонанса, заключающегося в избирательном поглощении или излучении электромагнитных волн веществом, находящимся в магнитном поле. В зависимости от природы элементарных частиц, участвующих в процессе резонансного поглощения или излучения энергии, различают электронный парамагнитный резонанс (ЭПР) и ядерный магнитный резонанс (ЯМР). Электронный резонанс в магнитоупорядоченных веществах называется ферромагнитным резонансом (ФМР) [47−50]. Датчики на основе ЯМР могут использовать свободную или вынужденную прецессию ядерного магнитного момента во внешнем измеряемом поле. Чаще применяются датчики на основе свободной прецессии. Их называют прецессионными или протонными [51,52]. Достигаемая пороговая чувствительность составляет ~ 10~б Э.
Датчики, основанные на явлении ЭПР, по своему принципу тождественны датчикам на ЯМР. Разница заключается в величине частоты прецессии магнитного момента и ширины линии резонанса. Частота ЭПР примерно на 4 порядка выше частоты ЯМР и составляет ~ 109- 10!°Гц (при Нп ~ 103 Э), то есть лежит в диапазоне сантиметровых волн. Повышенная частота ЭПР потенциально повышает чувствительность метода. Однако ширина линии ЭПР в сотни раз больше 0,5Э), чем ширина линии ЯМР, что, напротив, понижает чувствительность метода.
Явление ФМР является разновидностью электронного магнитного резонанса и также позволяет создавать датчики магнитного поля [56−68]. Интенсивность резонанса в магнитоупорядоченных структурах — ферромагнетиках и ферримагнетиках — на много порядков превышает интенсивность парамагнитного резонанса.
Магнитометры резонансного типа выгодно отличаются от других типов магнитометров в первую очередь тем, что в качестве информационного параметра используют частоту. Когда об изменении магнитного поля судят по изменению тока или напряжения, при необходимом для обработки сигнала усилении вносится существенная дополнительная погрешность. У резонансных магнитометров частота как информационный параметр не требует дополнительного усиления, являясь одним из наиболее точно измеряемых и помехозащигценных факторов.
Другим достоинством магнитометров на основе ФМР являются малые размеры и возможность устанавливать их на движущихся объектах и внутри работающих двигателей и механизмов, т. е. миниатюрность, мобильность и устойчивость к внешним воздействиям. Если рассматривать комплекс параметров магнитометра — чувствительность, масса, габариты, энергопотребление, пространственная разрешающаяся способность, — то одним из перспективных направлений представляется разработка магнитометров на основе ФМР в ЖИГсферах1 [53−55].
В таблице 1 для сравнения приведены известные типы магнитных датчиков, их чувствительность и принцип действия. Автогенераторные датчики, построенные на ФМР, выгодно отличаются от большого числа известных датчиков и могут быть реализованы на основе современных технологий в виде малогабаритных, портативных устройств, включающих микроконтроллерную обработку сигнала-отклика и его протоколирование на ЭВМ.
1 Магнитометрические датчики, построенные на основе монокристаллических пленок ЖИГ, включая многослойные с заданным законом изменения намагниченности и полей анизотропии в каждом слое и профилем магнитных параметров по толщине пленки, будут иметь еще ряд существенных преимуществ — более высокое угловое разрешение и чувствительность.
Таблица 1 п/п Тип датчика Пороговая чувствительность Принцип действия.
1 Магнитостатический 1 нТл (10″ 5 Э) Взаимодействие измеряемого поля с постоянным магнитом.
2 Электрический (электромагнитный) ОД нТл (10″ ь Э) Взаимодействие измеряемого поля с магнитным полем катушек (обычно колец Гельмгольца).
3 Индукционный ОД — 1 нТл (10″ 6−10−5 Э) Наведение э.д.с. в контуре при изменении магнитного потока.
4 Феррозонд 10″ ' - 10″ нТл (107 -10″ 6 Э) Разновидность индукционного измерения по второй гармонике.
5 Гальваномагнитный 10° - 10″ 4Тл (ОД -1Э) Эффект Холла.
6 Магниторезистивные 10 нТл (10″ 4 Э) Возникновение силы Лоренца в магнитном поле.
7 Квантовый ОД нТл (10″ ь Э) Явление ядерного магнитного резонанса.
8 На основе ФМР 0,01 — ОД нТл (10″ 7- 10″ 6Э) Явление ферромагнитного резонанса (электронный резонанс в магнитоупорядоченных веществах).
9 Сверхпроводящий 10″ ° нТл (10″ «Э) Измерение числа квантов магнитного потока пронизывающего контура.
В Саратовском государственном университете на кафедре общей физики и ее филиале в ОАО «Тантал» в течение многих лет ведутся интенсивные исследования по магнитоэлектронике, в том числе и по датчикам магнитного поля [56]- В настоящее время созданы образцы магнитоэлектронных датчиков, позволяющих с высокой степенью точности измерять характеристики магнитного поля Земли. Достоинствами таких датчиков являются: миниатюрность, высокая чувствительность, возможность определять не только значение, но и направление магнитного поля Земли, мобильность, устойчивость к вибрации, удару, спецвоздействиям и др. [39, 40].
Цель диссертационной работы состоит в определении режимов работы магнитоэлектронных датчиков слабых магнитных полей, обеспечивающих высокую точность измерения компонент индукции магнитного поля Земли, путей повышении стабильности их работы и чувствительности при использовании в системах управления.
В связи с поставленной целью в работе решались следующие основные задачи:
1. Упрощение калибровки магнитометра и уменьшение погрешности установки оси датчика вдоль магнитного меридиана.
2. Сведение к минимуму операций, производимых при измерении компонент магнитного поля Земли магнитометром на основе магнитоэлектронного датчика.
3. Разделение кратковременной и долговременной нестабильностей в показаниях магнитометра для определения физической природы этих нестабильностей.
4. Повышение устойчивости показаний магнитометра к изменениям температуры.
5. Подавление ВЧ и импульсных внешних магнитных помех немагнитными проводящими кольцами при сохранении пороговой чувствительности системы к относительно медленным изменениям геомагнитного поля.
В диссертации получены следующие результаты, характеризующиеся научной новизной:
1. Предложен и экспериментально опробован новый способ калибровкиначальной установки оси датчика вдоль магнитного меридиана, заключающийся во вращении датчика на углы кратные 90°. Также предложено для уменьшения погрешности установки оси датчика вдоль магнитного меридиана и сохранения высокой угловой чувствительности использовать в его конструкции два ортогональных первичных преобразователя.
2. Предложен и экспериментально опробован новый способ измерения трех компонент магнитного поля Земли информационно-измерительной системой на основе одного магнитоэлектронного датчика, характеризующийся тем, что измерения проводятся вращением датчика с фиксацией в 3-х опорных точках, углы между которыми составляют 90° с последующими поворотами на 180° из каждой точки соответственно.
3. Для исключения вращения датчика при его калибровке и измерениях предложено размещать в конструкции первичного магниточувствительного преобразователя два ферритовых резонатора с противоположно направленными полями подмагничивания и попеременно подключающихся к усилителю в режиме измерения индукции магнитного поля Земли.
4. При обработке показаний магнитометра предложено использовать метод разностных операторов 3-го порядка, позволяющий разделить долговременные уходы и кратковременную нестабильность показаний датчика с целью определения их физической природы независимо от характера тренда. Установлено, что долговременные уходы определяются изменением температуры элементов датчика, а кратковременные нестабильности обусловлены внешними случайными электромагнитными воздействиями.
5. Теоретически и экспериментально показано, что применение разностного датчика, содержащего в себе 2 идентичных однокомпонентных датчика с противоположно направленными полями подмагничивания, в качестве измерительного преобразователя позволяет уменьшить долговременную нестабильность частоты и повысить в 2 раза чувствительность магнитометра.
6. Теоретически и экспериментально показано, что компенсация влияния ВЧ и импульсных помех на работу измерительного преобразователя магнитного поля Земли возможна за счет применения немагнитных проводящих колец, в том числе и трехмерных, при сохранении чувствительности датчика к медленным изменениям магнитного поля.
Результаты и положения, выносимые на защиту.
1. Поворот измерительного преобразователя на фиксированные углы, кратные 90°, позволяет упростить калибровку датчика и уменьшить погрешность установки оси датчика вдоль магнитного меридиана. Для исключения вращения датчика предложено размещать в конструкции первичного магниточувствительного преобразователя два ферритовых резонатора с противоположно направленными полями подмагничивания и попеременно подключающихся к усилителю в режиме измерения.
2. Разделение долговременных уходов и кратковременных нестабильностей показаний датчика позволило установить, что долговременные уходы определяются изменением температуры элементов датчика, а кратковременные нестабильности обусловлены главным образом внешними электромагнитными воздействиями (помехами).
3. Применение в качестве измерительного преобразователя разностного датчика для определения вектора магнитного поля Земли повышает устойчивость его показаний к изменениям температуры и увеличивает чувствительность в два раза.
4. Использование проводящих немагнитных колец уменьшает влияние на показания магниточувствительного измерительного преобразователя высокочастотных и импульсных флуктуаций магнитного поля при сохранении пороговой чувствительности к его медленным изменениям.
Диссертация состоит из введения, трех глав, имеющих параграфы, заключения, списка использованной литературы из 103 наименований и 4 приложений. Общий объем диссертации составляет 129 страниц, в том числе основной текст занимает 107 страниц, включая 38 рисунков.
ЗАКЛЮЧЕНИЕ
.
Датчики магнитного поля разных типов широко используются в различных системах управления, в том числе навигационных. Одним из перспективных направлений совершенствования систем управления, улучшения их характеристик — устойчивости к воздействию внешних магнитных помех, устойчивости к температурным изменениям и др., — является применение в качестве первичных преобразователей датчиков измерения слабых магнитных полей, основанных на явлении ФМР в ЖИГ-сферах.
В настоящей работе проведен анализ проблем, связанных с применением датчиков измерения слабых магнитных полей в таких областях как: магнитная навигация, магниторазведка, дефектоскопия. Показано, что их конструктивное совершенствование может использоваться для создания различных систем управления с повышенной устойчивостью к изменениям температуры и внешним высокочастотным магнитным помехам.
Кратко можно указать следующие основные результаты, полученные при выполнении диссертационной работы, и выводы из нее:
1. Предложен новый способ калибровки — установки оси датчика вдоль магнитного меридиана, заключающийся во вращении датчика на углы кратные 90°. Учитывая, что зависимость частоты генерации датчика от угла его поворота представляется в виде / = /0 + А/от cos (<р + <р0), и измеряя три.
О 0 0 значения частоты — // при ф=0, /2 при ф=90 и /3 ф= 180 — проводится восстановление экспериментальной косинусоиды. Тогда, зная текущее значение частоты /, среднее значение частоты /0, угол поворота датчика ф и.
А г 1 лС ./max fmm вычислив Ajm по формуле ¿-ут —— можно определить ф0, т. е. отклонение оси системы от магнитного меридиана (систематическую погрешность). Такой способ калибровки является более простым в сравнении с известным ранее способом, когда проводилось сравнение с результатами измерений аттестованного промышленного магнитометра. Для уменьшения погрешности при установке оси датчика вдоль магнитного меридиана предложено использовать в его конструкции два ортогональных первичных преобразователя.
2. Для устранения необходимости поворота датчика при измерении магнитного поля предложено размещать в конструкции первичного магниточувствительного преобразователя два ферритовых резонатора с противоположно направленными полями подмагничивания и попеременно подключающихся к усилителю в режиме измерения компоненты индукции магнитного поля Земли. Такое конструктивное решение позволяет исключить вращение датчика.
3. При использовании датчика в качестве измерителя слабых магнитных полей (магнитного поля Земли) предложен новый способ измерения. Он состоит в повороте датчика на углы, кратные 90° из начального положения, которое определяется предварительной калибровкой, описанной выше. Для определения Х-компоненты индукции магнитного поля Земли измеряются два значения частоты датчика /} при 0/=О° и (pf= 0° и f2 при (р2==180° при 0/=О° (рис. 1.3.1), а f fi.
Взх= г. • Для определения Yкомпоненты индукции магнитного поля 27.
Земли датчик надо повернуть от первоначального положения на 90° в горизонтальной плоскости по часовой стрелке (если смотреть на датчик сверху). Измеренное значение частоты для такого положения f3 = f0 + у Взу Затем повернуть датчик на 180° (в горизонтальной плоскости) и измерить значение f4= fo-y JV Тогда В = А-Д.
2у.
Для определения B3Z необходимо, чтобы в начальном положении ось системы была направлена вдоль оси Z. Для этого датчик надо повернуть на 90° в вертикальной плоскости. Угол (р может быть выбран в этом случае произвольно. Значение частоты будет fs=fo+ Т3ZПосле поворота датчика в вертикальной плоскости еще на 180° значение частоты станет f6= fo-y B3Z, и тогда.
В&bdquo- =——. Такой способ измерения позволяет с помощью однокомпонентного.
2 у датчика измерить все три компоненты индукции магнитного поля Земли при шести положениях датчика, сдвинутых относительно друг друга на 90°.
4. Для определения физической природы нестабильностей в показаниях датчика была проведена обработка показаний по методу разностных операторов 3-го порядка. Т. е. к полученному в результате эксперимента временному ряду, содержащему в себе как кратковременную, так и долговременную нестабильности был применен метод удаления тренда. Метод разностных операторов, преобразующий исходный ряд к ряду разностей соседних значений по формуле = - ЗА/)1 + ЗА/)2 — А/]3, был выбран как наиболее подходящий для данного случая. Было установлено, что долговременные уходы определяются изменением температуры элементов датчика, а кратковременные нестабильности обусловлены внешними электромагнитными воздействиями.
5. Для уменьшения чувствительности датчика к нестационарным изменениям температуры внутри него самого, связанных с неравномерным и постепенным прогревом его отдельных элементов, и приводящим к нестационарным изменениям в показаниях датчика, предложено применять разностный датчик. Он содержит в себе два идентичных однокомпонентных датчика с противоположно направленными полями подмагничивания. Экспериментально показано, что использование в качестве измерительного преобразователя разностного датчика позволяет уменьшить долговременную нестабильность частоты и повысить в 2 раза чувствительность магнитометра, так как в этом случае Д//АВ=2у.
6. Проведены теоретические и экспериментальные исследования компенсации влияния ВЧ и импульсных помех на работу измерительного преобразователя магнитного поля Земли. Исследования показали, что компенсацию внешних ВЧ магнитных помех можно осуществлять с помощью немагнитных кольцевых экранов. Физической основой такой компенсации является электромагнитная индукция. Для большей эффективности необходимо, чтобы центр кольца (или цилиндра) совпадал с центром магниточувствительного преобразователя, а ось кольца (или цилиндра) совпадала бы по направлению с осью датчика. Размеры немагнитного экрана выбираются таким образом, чтобы обеспечивать небольшое значение отношения сопротивления кольца к его индуктивности. При проведении экспериментов применялись: латунный цилиндр диаметром о = 2,9 см, высотой h = 2,3 см с толщиной стенок, а = 0,2 см и алюминиевый цилиндр диаметром 0 = 7,5 см, высотой h = 15,5 см с толщиной стенок, а = 0,3 см. Результаты эксперимента показали, что при использовании таких немагнитных цилиндров влияние внешних магнитных помех на показания датчика уменьшается в 3 + 4 раза. В работе рассматривается возможность применения и трехмерных экранирующих колец. Достоинством предложенного способа компенсации является то, что удается сохранить пороговую чувствительность датчика к внешним медленным изменениям магнитного поля. Описанный способ компенсации защищен свидетельством на полезную модель (заявка № 2 007 125 198 от 03.07.2007., положительное решение от 27.11.2007.). Материалы, на основании которых написана диссертация, опубликованы в следующих работах:
AI] Романченко J1.A. Прогнозирование нестационарных уходов частоты в радиотехнических генераторах / JI.A. Романченко, Ю. В. Норов // Вопросы прикладной физики: межвуз. науч. сб. — Саратов: Изд-во Сарат. ун-та. 2000. Вып. 6. — С. 73−74.
А2] Романченко J1.A. Отечественные и зарубежные патенты по магнитометрическим датчикам и магнитометрам за 1994;2003 годы / A.A. Игнатьев, A.B. Ляшенко, Л. А. Романченко и др. // Гетеромагнитная микроэлектроника: сб. докл. и ст. науч.-техн. совещ. — Саратов: Изд-во Сарат. ун-та. 2004. — Вып. 1. Многофункциональные комплексированные устройства и системы СВЧи КВЧ-диапазонов. — С. 152−165. [A3] Романченко J1.A. Отечественные и зарубежные патенты по транзисторам, магнитотранзисторам и ЖИГ-генераторам за 1992;2003 годы / A.A. Игнатьев, A.B. Ляшенко, JI.A. Романченко и др. // Гетеромагнитная микроэлектроника: сб. докл. и ст. науч.-техн. совещ. -Саратов.: Изд-во Сарат. ун-та, 2004. — Вып. 1. Многофункциональные комплексированные устройства и системы СВЧи КВЧ-диапазонов. — С. 165−173.
A4] Романченко JI.A. Анализ патентной информации характеристик магнитометрических датчиков из магниторезистивных и полупроводниковых материалов, датчикам генераторного типа, микрорезонаторным датчикам и магнитометрам на их основе / С. П. Кудрявцева, JI.A. Романченко, JI.JI. Страхова и др. // Гетеромагнитная микроэлектроника: сб. докл. и ст. II и III науч.-техн. совещ. / под ред. проф. А. А. Игнатьева. — Саратов: Изд-во Сарат. Государственного ун-та, 2005. — Вып. 2. Методы проектирования магнитоэлектронных устройств. -С. 175−191.
А5] Романченко JI.A. Определение магнитного поля Земли магнитометрическим датчиком при вращении его на углы, кратные 90°/ М. Н. Куликов, JI.A. Романченко // Гетеромагнитная микроэлектроника: сб. докл. и ст. II и III науч.-техн. совещ. / под ред. Проф. А. А. Игнатьева. — Саратов: Изд-во Сарат. ун-та, 2005. — Вып. 2. Методы проектирования магнитоэлектронных устройств. — С. 109−114. [А6] Романченко JI.A. Устройство для измерения магнитных полей / А. А. Игнатьев, М. Н. Куликов, JI.A. Романченко и др. Приор. № 2 007 125 198 от 03.07.2007. Положит, реш. от 27.11.2007.
А7] Романченко Л. А. Подавление быстропеременных магнитных полей в устройствах (системах) измерения слабых магнитных полей / М. Н. Куликов,.
Л.А.Романченко // Приборы и системы. Управление, контроль, диагностика.
2007 г, № 5. С.43−46. [А8] Романченко J1.A. Подавление быстропеременных магнитных помех в датчиках магнитного поля / JI.A. Романченко, М. Н. Куликов, A.A. Игнатьев и др. // Датчики и системы -2006: сб. трудов Всерос.науч.-практ. конф. «Создание и развитие датчиков для систем измерения, контроля, управления и диагностики» (Россия, г. Москва, 30−31 мая 2006 г.)/Пенза: ФНПЦ ФГУП «НИИ физических измерений», 2006 г. — С. 308−310.
А9] Кудрявцева (Романченко) JI.A. Определение кратковременной составляющей нестабильности частоты радиотехнических автогенераторов с помощью частотомера. / Н. В. Герасимова, JI.A. Кудрявцева (Романченко) // Материалы XXXVI Междунар. С1уд.конф. — Новосибирск, 1998. С. 47.
Автор выражает искреннюю благодарность своему научному руководителю кандидату физико-математических наук, профессору кафедры общей физики Куликову Михаилу Николаевичу за постоянное внимание к работе, формирование научных навыков и научного склада мышления.
Автор также благодарит заведующего кафедрой общей физики доктора физико-математических наук, профессора Игнатьева Александра Анатольевича, а также весь его научный коллектив Конструкторского Бюро Критических Технологий ОАО «НИИ-Тантал» за предоставленные для исследований образцы датчиков магнитного поля.
Список литературы
- Семевский Р.Б., Аверкиев В. В., Яроцкий В. А. Специальная магнитометрия. СПб: Наука, 2002. 228 е., 78 ил.
- Логачев A.A. Курс магниторазведки. М.: Госгеолиздат, 1951.
- Павлов Ю.Н., Селезнев A.B., Толстоусов Г. Н. Геоинформационные системы. М.: Машиностроение, 1978. 272с., ил.
- В.П. Селезнев. Навигационные устройства. Учебное пособие. М.: Машиностроение, 1974 г.- 600с.
- Ммхлин Б.З., Селезнев В. П., Селезнев A.B. Геомагнитная навигация. М.: Машиностроение, 1976. 280с.
- А.К.Неусыпин, О. Б. Смолкин. Алгоритмический метод коррекциии инерциальных навигационных систем в автономном режиме // Автоматизация и современные технологии. 2001 г. № 2. С.22−24.
- Магнитное поле океана. М.: Наука, 1990 г.
- Яновский Б.М. Земной магнетизм. Л.: Изд-во ЛГУ. 1964 г.
- А.К.Неусыпин, О. Б. Смолкин. Алгоритмическая компенсация погрешностей инерциальной навигационной системы // Автоматизация и современные технологии. 2002 г. № 3. С. 26 28.
- А.К.Неусыпин. Оценка азимутальной скорости дрейфа инерциальной системы. Автоматизация и современные технологии. 2003 г. № 6. С. 6−8.
- Чон Нгок Ньанъ. Алгоритм комплексирования навигационной системы с датчиком угловых ускорений // Автоматизация и современные технологии. 2005 г. № 5. С.28−29.
- К.А.Неусыпин, Чон Нгок Ньанъ. Алгоритмические методы повышения точности автономных навигационных систем // Автоматизация и современные технологии. 2006 г. № 2. С. 14−19.13 .Колесова В. И. Аналитические методы магнитной картографии. М.: Наука, 1985.
- Б.М. Смирное. Определение индукции геомагнитного поля на фоне магнитных помех подвижного объекта // Измерительная техника. 2003 г. № И. С.52−58.
- Афанасьев Ю.В. и др. Средства измерения параметров магнитного поля. -Л.: Энергия, 1979.-320с.
- Digital compass solutions. Solid State Electronics Center. Материалы сайта: www.magneticsensors.com.
- Apparatus for utilizing the Earth’s magnetic field to indicate air-craft: patent № 2 785 376 USA. Alan Hazeltine, Maplewood, Hazeltine Research, Inc., Chicago, Заявка № 492 288 от 4.03.1955г. Опубл. 12.03.1957 г.
- Magnetometers. Micro-orientation sensor. Материалы сайта: www.xbow.com
- Stresscan-500. Материалы сайта: www. argosy — tech. ru
- Измеритель напряженности магнитного поля ИМП-6. Материалы сайта: www. nw-technology.ru.
- Измеритель напряженности магнитного поля ИМАГ-400Ц. Материалы сайта: www. nw-technology.ru.
- Магнитные интроскопы серии МИ-2Х для наружного обследования трубопроводов. Материалы сайта: www.introsco.ru.
- Внутритрубные магнитные интроскопы серии МИ-ЗХ для диагностирования трубопроводов. Материалы сайта: www.introsco.ru.
- Городницкий A.M., Филин A.M. Изучение дна океанов и поиск металлических объектов магнитными методами//Вестник РАЕН. 2001. № 1.-С. 21−28.
- Geometries G-866 Magnetometer. Материалы сайта: www. seatronics-group.com.
- Способ определения скорости подвижных объектов: пат. № 2 104 554 Рос. Федерация: МПК6 G 01 Р 3/50 / автор и заявитель Рыбкин В. В. Заявка № 95 110 329/28 от 19.06.1995 г. Опубл. 10,02.1998г- патентообладатель Рыбкин Владимир Васильевич.
- Гироскопический инклинометр ИГМ-73−120/60. Ижевский механический завод (ГУП «ИМЗ»). Материалы сайта www.izh.ru
- Ъ2.Афанасьев Ю. В., Студенцов Н. В., Щёлкин А. П. Магнитометрические преобразователи, приборы, установки. Л.: Энергия, 1972.33 .Ю. Н. Кочемасов, Ю. Б. Колегаев Сравнительный анализ характеристик датчиков магнитного поля. // Датчики и системы № 4. 2001 г.
- Ъ А. Бараночников M.JI. Микромагнитоэлектроника. М.: ДМК Пресс, 2001. Т.1. 544с.: ил. (Серия «Учебник»).35 .Васильева Н. П., Касаткин С. И., Муравьев Л. М. Тонкопленочные магниторезистивные датчики // Зарубежная электронная техника. 1994. № 4 6, — С. 56−76.
- Дубинин Д.В., Бутакое C.B. Двухкомпонентный микрополосковый датчик магнитного поля. Институт физики СО РАН, г. Красноярск. // Материалы сайта: www. Kirensky. ru.
- Касаткин С.И. и др. Тонкоплёночные многослойные датчики магнитного поля на основе анизотропного магниторезистивного эффекта // Микроэлектроника, 2000, т. 29, № 2, с. 149 160.
- Hiromitsu Itabashv.- патентообладатель Hitachi Metals, Ltd., JP. Заявка № 10/020,946- Приор. 19.12.2001 г. Опубл. 17.02.2004 г.
- Ю.В. Афанасьев. Феррозонды. JL: Энергия. 1969 г. 168с.
- Материалы сайта www.giscogeo.com.
- А1.Б. В. Чувыкин Применение СКВИД-магнитометров для решения задач магнитной локации // Датчики и системы № 5, 2001 г.
- Гуревич А.Г. Магнитный резонанс в ферритах и антиферромагнетиках. М.: Наука. 1973.
- Лаке. Б., Баттон К. Сверхвысокочастотные ферриты и ферримагнетики. М.: Мир, 1965.
- GSM-30 Portable Potassium Magnetometer / Gradiometer. Материалы сайта www.giscogeo.com.
- GSM-19T (W) Proton Precession Magnetometer / Gradiometer.
- Беляев Б.А., Бутаков С. В., Лекеиков А. А. Микрополосковый тонкоплёночный датчик слабых магнитных полей // Микроэлектроника. 2001. Т. 30. № 3, — С. 228−237.
- Лебедь Б.М., Лаврович В. А., Хохлышев И. О. Ферритовые фильтры и их применение в приборах с магнитной перестройкой частоты // Обзоры поэлектронной технике. Серия 1. Электроника СВЧ. М.: ЦНИИ «Электроника», вып. 10 (914), 1982.
- Игнатьев A.A., Гурзо В. В., Плешков В.В и др. Генераторный YIG-датчик магнитной индукции Направления развития электронного приборостроения // Материалы научно-технической конференции 18−19 февраля. Саратов. 2003 г.
- Бычков С. И. Стабилизация частоты генераторов СВЧ / Бычков С. И., Буренин Н. И., Сафаров Р. Т. / Под ред. Бычкова С. И. М.: Сов. радио. 1962.-376 с. 58.3-axis magnetic sensor. Solid State Electronics Center // Материалы сайта: www.magneticsensors.com.
- Magnetometers. PC board level 3-axis fluxgate magnetometer. Материалы сайта www.xbow.com.
- Устройство для измерения параметров ферромагнитного резонанса ферритовых сфер: пат. № 1 190 743 СССР: G Ol R 33/00 / авторы и заявители Андреев В. И., Петров В.В.- патентообладатели Андреев В. И., Петров В. В. Опубл. 27.09.1995 г. Заявка № 3 743 987/21.
- Датчик магнитного поля и устройство на основе датчика: пат. № 02 061 445 ВОИС: G 01 R 33/02 / авторы и заявители Mapps Desmond James (GB) — V Panina Larissa (GB) — патентообладатели Mapps Desmond James (GB) — V
- Panina Larissa (GB). Приор. GB 2001 260 220 010 201. Опубл.0808.2002г.
- Устройство регистрации магнитного поля: пат. № 213 4890 Рос. Федерация: G 01 R 33/06, 33/00 / авторы Лопатин В. В., Сватков A.B.- патентообладатель войсковая часть 35 533. Заявка № 97 112 362/09- Приор. 08.07.1997 г. Опубл. 20.08.1999 г. Бюл. № 23.
- Магнитометр: пат. № 2 202 805 Рос. Федерация: G 01 R 33/24, 33/20 / авторы Тельминов М. М., Фисенко А. Г., Довгань A.C., Войтенко A.B.- заявитель и патентообладатель ЗАО «Монацит». Заявка № 200 0101 582/09- Приор. 20.01.2000г- Опубл. 20.04.2003 г. Бюл. № 11.
- Датчик магнитного поля: пат. № 2 091 808 Рос. Федерация: G 01R 33/05 / авторы Беляев Б. А., Тюрнев В.В.- заявитель и патентообладатель Институт физики им. Л. В. Киренского СО РАН. Заявка № 920 022 10 / 28- Приор. 26.10.1992 г. Опубл. 27.09.1997 г. Бюл. № 27.
- Михайлов П.Г., Михайлов А. П. Элементы и структуры микроэлектронных датчиков, методы и средства функциональной диагностики // Датчики и системы. 2005 г. № 11. С.56−58.
- Б.М. Смирнов. Привязка осей трехкомпонентного магнитометрического датчика к осям навигационной системы ферромагнитного подвижного объекта // Измерительная техника. 2004 г. № 7. С. 27−31.
- Касаткин С.И. •и др. Пространственно-векторная мышь для САПР трехмерной графики // Материалы сайта: www.introsco.ru.
- Зырин С. С. Высокостабильный сверхмалошумящий транзисторный СВЧ-генератор / Зырин С. С., Котов А. С. // Электронная техника. Серия 1. Электроника СВЧ. — 1991. -Вып. 7(441). — С. 26−30.
- Государственная система обеспечения единства измерений. Метрология. Основные термины и определения: РМГ 29−99: утв. Межгос. Советом по стандартизации, метрологии и сертификации 28 мая 1999г: ввод в действие с 1.01.2001г.
- Аппаратура для частотных и временных измерений под ред. А. П. Горшкова. М.: «Сов. Радио», 1971 г. 89с.
- Ы.Р. А. Валитое, В. Н. Сретенский. Радиотехнические измерения. Методы и техника измерений в диапазоне от длинных до оптических волн. М.: Сов. радио, 1970 г.- С. 98- 106.
- А.Ван дер Зил. Шум. Источники, описание, измерение / Пер. с англ. В. Н. Кулешова и Д. П. Царапкина. Под ред. А. К. Нарышкина. М.: Сов.радио. 1973 г.
- А.Ван дер Зил. Флуктуации в радиотехнике и физике. Пер. с англ. под ред. Л. С. Гуткина. М.: Госэнергоиздат, 1958 г.
- Электромагнитная совместимость радиоэлектронных средств и непреднамеренные помехи. В 3-х вып. Вып.2 Внутрисистемные помехи и методы их уменьшения: Сокр. пер. с англ. / под ред. А. И. Сапгира, — М.: Сов. Радио, 1978.-272 с.
- Харкевич A.A. Борьба с помехами. М.: Наука, 1965 г.
- Князев А.Д. Элементы теории и практики обеспечения электромагнитной совместимости радиоэлектронных средств. М.: Радио и связь, 1984. 336 е., ил.
- Лысенко А.П. Теория и методы компенсации магнитных помех // Геофизическое приборостроение. Л.: Изд-во МГ СССР, 1960. Вып. 7. С. 44−58.
- DEGAUSSING COIL: пат. № 8 256 348 Япония: МПК Н 01 J 29/00, Н 04 N9/29 / авторы AMAMIYA YOSHIO, WATANABE HIROSHI- заявитель и патентообладатель Hitachi Ltd. Заявка № JP 19 950 056 985. Приор. 16.03.1995. Опубл. 01.10.1996.
- Романченко Jl.А. Подавление быстропеременных магнитных полей в устройствах (системах) измерения слабых магнитных полей / М. Н. Куликов, Л. А. Романченко // Приборы и системы. Управление, контроль, диагностика. 2007 г. № 5. С.4346.
- ЮЗ.Романченко Л. А. Устройство для измерения магнитных полей / А. А. Игнатьев, М. Н. Куликов, Л. А. Романченко и др. Приор. № 2 007 125 198 от 03.07.2007. Положит, реш. от 27.11.2007.